Contrôle de l’onduleur de la source de tension du moteur d’induction:
La fréquence variable et l’alimentation de tension variable pour le contrôle du moteur à induction peuvent être obtenues à partir d’un onduleur Sourve de tension (VSI) ou d’un cycloconverateur. Contrôle de l’onduleur de la source de tension du moteur d’induction est décrit ici et les entraînements nourris par cycloconvertisseurs.
Drives de moteur à induction VSI:
Contrôle de l’onduleur de la source de tension du moteur à induction permet d’obtenir une alimentation en fréquence variable à partir d’une alimentation en courant continu. La figure 6.37 (a) montre un VSI employant des transistors. Tout autre dispositif auto-démunie peut être utilisé à la place d’un transistor.
Généralement, le MOSFET est utilisé dans les onduleurs à basse tension et à faible puissance, l’IGET (transistor bipolaire à la porte isolée) et les transistors de puissance sont utilisés jusqu’à des niveaux de puissance moyens et le GTO (Gate éteint le thyristor) et l’IGCT (thyristor à la porte isolée) sont utilisés pour des niveaux de puissance élevés.

Contrôle de l’onduleur de la source de tension du moteur à induction peut être utilisé sous forme d’onduleur d’onde à étagère ou un onduleur modulé par largeur d’impulsion (PWM).
Lorsqu’ils fonctionnent comme un onduleur d’onde étalé, les transistors sont commutés dans la séquence de leur nombre avec une différence de temps de T / 6 et chaque transistor est maintenu pendant la durée T / 2, où t est la période de temps pour un cycle. La forme d’onde de tension de ligne résultante est représentée sur la fig.
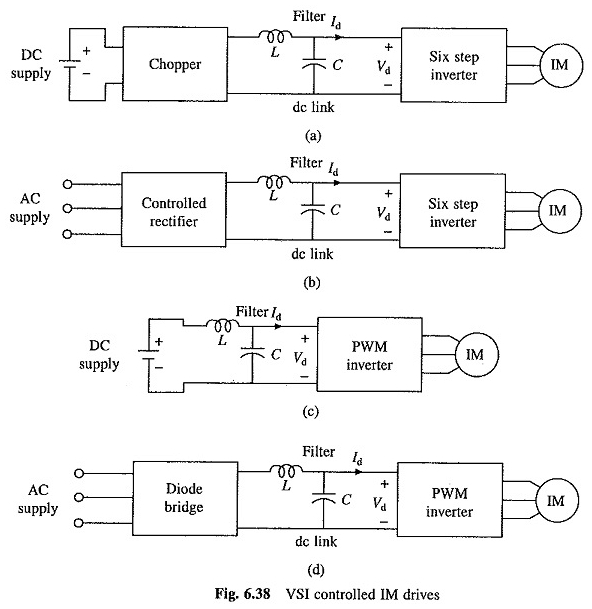
6.37 (b). La fréquence du fonctionnement de l’onduleur est variée en variant T et la tension de sortie de l’onduleur est variée en variant la tension d’entrée CC variable. Lorsque l’alimentation est DC, la tension d’entrée CC variable est obtenue en connectant un hachoir entre l’alimentation en courant continu et l’onduleur (Fig. 6.38 (a)).
Lorsque l’alimentation est AC, la tension d’entrée CC variable est obtenue en connectant un redresseur contrôlé entre l’alimentation AC et l’onduleur (Fig. 6.38 (b)).
Un grand condensateur de filtre électrolytique C est connecté dans la liaison DC pour rendre le fonctionnement de l’onduleur indépendant du redresseur ou du hachoir et pour filtrer les harmoniques dans la tension de liaison DC.
Les tensions de ligne de sortie et de phase de l’onduleur sont données par la série de Fourier suivante:


La valeur RMS de la tension de phase fondamentale

Le couple pour une vitesse donnée peut être calculé en considérant uniquement la composante fondamentale. L’inconvénient principal de l’onduleur d’onde étanche est les grandes harmoniques de basse fréquence dans la tension de sortie.
Par conséquent, un entraînement à moteur à induction nourri à partir d’un onduleur d’onde étalé souffre des inconvénients suivants:
- En raison des harmoniques à basse fréquence, les pertes de moteur sont augmentées à toutes les vitesses provoquant un rétrécissement du moteur.
- Le moteur développe des couples pulsants en raison des cinquième, septième, onzième et treizième harmoniques qui provoquent un mouvement saccadé du rotor à basse vitesse.
- Le contenu harmonique dans le courant du moteur augmente à basse vitesse. La machine sature à des charges légères à basse vitesse en raison du rapport élevé (VLF). Ces deux effets surchauffent la machine à basse vitesse, limitant ainsi la vitesse la plus basse à environ 40% de la vitesse de base.
Les harmoniques sont réduites, les harmoniques basse fréquence sont éliminées, les pertes associées sont réduites et le mouvement lisse est obtenu à basse vitesse également lorsque l’onduleur est fonctionné comme un onduleur modulé par la largeur d’impulsion. Figue.
6.37 (c) montre la forme d’onde de tension de sortie pour la modulation sinusoïdale de la largeur d’impulsion.
Étant donné que la tension de sortie peut désormais être contrôlée par modulation de largeur d’impulsion, aucune disposition n’est requise pour la variation de la tension CC d’entrée, l’onduleur peut donc être directement connecté lorsque l’alimentation est DC [Fig. 6.38 (c)] et via un redresseur de diode lorsque l’alimentation est AC. [Figue. 6.38 (d)].
La composante fondamentale de la tension de phase de sortie d’un onduleur PWM fonctionnant avec PWM sinusoïdal est donnée par

où est l’indice de modulation.
Les harmoniques du courant du moteur produisent une pulsation de couple et demandent le moteur. Pour une teneur en harmonique donnée dans la tension de la borne du moteur, les harmoniques de courant sont réduites lorsque le moteur a une inductance de fuite plus élevée, ce qui réduit les pulsations de rétrécation et de couple.
Par conséquent, lorsqu’il est utilisé à partir de l’onduleur de l’onduleur de la source de tension du moteur d’induction avec une inductance de fuites importante (par rapport à l’alimentation en alimentation sinusoïdale) est utilisée.
Freinage et fonctionnement multiquadrant des entraînements moteurs à induction VSI:
L’entrée d’alimentation dans le.motor est donnée par
![]()
où
V = composante fondamentale de la tension de phase motrice
Est = composante fondamentale du courant de phase motrice
Φ = angle de phase entre V et IS.
Dans le fonctionnement de l’automobile φ <90 °, la broche est donc positive, c’est-à-dire les flux de puissance de l’onduleur à la machine. Une réduction de la fréquence rend la vitesse synchrone inférieure à la vitesse du rotor et la vitesse relative entre les conducteurs de rotor et le champ rotatif de rotation à air.
Cela inverse l’EMF induit par le rotor, le courant du rotor et la composante du courant du stator qui équilibre les virages de l’ampère du rotor. Par conséquent, l’angle φ devient supérieur à 90 ° et le flux de puissance s’inverse.
La machine fonctionne comme une alimentation générateur dans l’onduleur, qui à son tour alimente l’alimentation en lien CC en inversant l’ID actuel de liaison CC.
Le freinage régénératif est obtenu lorsque la puissance s’écoulant de l’onduleur vers la liaison CC est utilisée utilement et que le freinage dynamique est obtenu lorsqu’il est gaspillé dans une résistance.
Freinage dynamique:
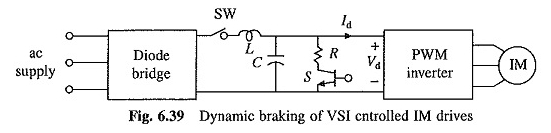
Considérons d’abord le freinage dynamique de l’onduleur modulé par la largeur d’impulsion de la figure 6.38 (d). Avec le freinage dynamique, le lecteur sera comme le montre la figure 6.39.
Pour le freinage dynamique, l’interrupteur SW et un commutateur auto-commercial (ici transistor) en série avec une résistance de freinage RB connecté sur la liaison CC sont ajoutés au lecteur de la figure 6.38 (d). Lorsque le fonctionnement du moteur est passé de l’autoroute à l’interrupteur de freinage, SW est ouvert.
L’énergie générée s’écoulant dans la liaison CC charge le condensateur et ses tensions augmentent. Lorsqu’il traverse une valeur définie, le commutateur S est fermé, reliant la résistance à travers le lien.
La puissance générée et une partie de l’énergie stockée dans le condensateur s’écoulent dans la résistance, et la tension de liaison CC réduit. Lorsqu’il tombe à sa valeur nominale, S est ouvert.
Ainsi, en fermant et en ouvrant les commutateurs en fonction de la valeur de la tension de liaison CC, l’énergie générée est dissipée dans la résistance, donnant un freinage dynamique. L’opération de freinage dynamique des disques des Fig. 6.38 (a) à (c) peut être obtenu de manière similaire.
Freinage régénératif:
Considérons d’abord le freinage régénératif des entraînements ondulés modulés par la largeur d’impulsion (PWM) des Fig. 6.38 (c) et (d). Dans le lecteur de la Fig. 6.38 (c), lorsque le fonctionnement de la machine passe de l’automobile au freinage, ID s’inverse et s’écoule dans l’alimentation DC alimentant l’énergie à la source.
Ainsi, le lecteur de la figure 6.38 (c) a déjà une capacité de freinage régénérative. Dans le cas de l’entraînement de la figure 6.38 (d), pour le freinage régénératif, l’alimentation fournie à la liaison CC doit être transférée à l’alimentation AC.
Lorsque l’opération passe de l’automobile à l’ID de freinage s’inverse, mais VD reste dans la même direction. Ainsi, pour la capacité de freinage régénérative, un convertisseur capable de gérer la tension à courant continu d’une polarité et un courant CC de l’une ou l’autre direction est nécessaire.
Un double convertisseur a cette capacité et a été utilisé dans le passé. Les disques récents utilisent le convertisseur de liaison synchrone (SLC) car il prend un courant sinusoïdal au facteur de puissance d’unité de la source CA, à la fois pendant les opérations de conduite et de freinage.
Ainsi, bien que ses performances soient supérieures, elle nécessite moins d’appareils qu’un double convertisseur. Le principe de son opération est expliqué ici.
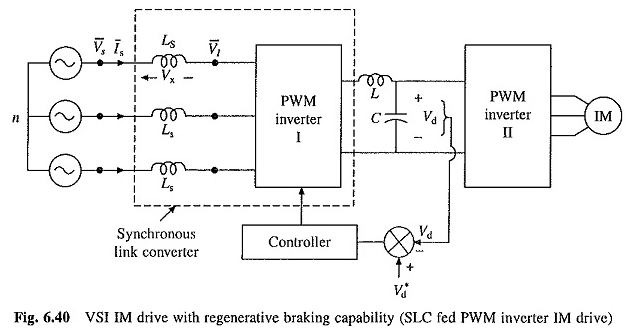
Un lecteur régénératif avec un onduleur SLC et PWM est illustré à la figure 6.40. L’onduleur LS et PWM INDUCTS I constituent un SLC.
L’onduleur PWM est exploité pour produire une tension VI de l’amplitude et de la phase requises et avec une faible teneur en harmonique, de sorte que le courant de source est presque sinusoïdal et en phase avec VS pour l’autorisation et 180 ° hors phase pour le freinage, donnant ainsi un facteur de puissance de l’unité.
Les diagrammes de phaseur sont représentés sur les Fig. 6.41 (a) et (b). Pour chaque valeur de IS, v1 de la phase et de l’ampleur donnés est requise. Cela peut être facilement réalisé dans la modulation sinusoïdale de la largeur d’impulsion (PWM).
Dans la magnitude PWM sinusoïdale et la phase de V1, dépend de l’amplitude et de la phase du signal de modulation [1]. Par conséquent, V1 de la phase et de l’ampleur donnés peut être produit en produisant un signal modulant de l’amplitude et de la phase requises.
Étant donné que VI est produit par l’onduleur PWM, il ne contient pas d’harmoniques basse fréquence. Le LS d’inductance filtre les harmoniques à haute fréquence pour produire un courant de source presque sinusoïdal est. Les diagrammes de phaseur de la figure 6.41 sont similaires à ceux d’une machine synchrone.
Ainsi, le comportement du convertisseur de liaison synchrone est similaire à celui d’une machine synchrone, il est donc appelé convertisseur de liaison synchrone.

Lorsque le lecteur de la Fig. 6.40 fonctionne en état d’équilibre, l’alimentation fournie (prise) par SLC doit être égale à l’électricité prise (fournie) par l’onduleur PWM II. Étant donné que les deux fonctionnent indépendamment les uns des autres, cela est réalisé en fournissant un contrôle de boucle fermée de la tension de liaison CC.
Lorsque l’alimentation fournie par SLC à la liaison CC est égale à la puissance prise par PWM Inverter II, aucune énergie ne sera fournie ou tirée du condensateur C et sa tension ne sera constante et égale à la valeur de référence Vd *.
Si maintenant la charge sur IM est augmentée, la puissance prise par l’onduleur PWM II à partir de la liaison DC sera plus élevée que la puissance fournie par le SLC. Par conséquent, la tension du condensateur VD tombera en dessous de sa valeur de référence Vd *.
Le contrôle de tension de boucle fermée augmentera la valeur de IS et donc l’alimentation fournie à la liaison DC. Par conséquent, la tension de liaison CC sera ramenée à la valeur de référence.
Étant donné que SLC fonctionne comme un convertisseur Boost, le contrôle de boucle fermée de la tension de liaison CC offre au lecteur avec une capacité de conduite contre un affaissement de tension et sous tension.
Lorsque la tension de la source AC tombe, le contrôle de tension de boucle fermée maintient la constante de tension de liaison CC en augmentant est, et donc le moteur continue d’être fourni une tension constante et produit par conséquent la même puissance et couple maximum.
Le lecteur de la figure 6.38 (b) peut avoir une capacité de freinage régénérative en remplaçant le redresseur contrôlé par un double convertisseur. Le SLC ne peut pas être utilisé car il nécessite un fonctionnement à une tension de liaison CC constante, tandis que la tension de liaison CC à six étapes doit être variée.
Le lecteur de la figure 6.38 (a) aura une capacité de freinage régénérative si un hachoir à deux quadrants de la figure 5.44 (capable de fournir une tension d’une polarité et de courant dans les deux sens) est utilisé.
Quatre opération de quadrant:
Quatre opération de quadrant peuvent être obtenues par n’importe quel entraînement avec une capacité de freinage (régénérative ou dynamique). Une réduction de la fréquence de l’onduleur, pour faire de la vitesse synchrone inférieure à la vitesse du moteur, transfère l’opération du quadrant I (automobile vers l’avant) à II (freinage vers l’avant).
La fréquence et la tension de l’onduleur sont progressivement réduites à mesure que la vitesse tombe pour freiner la machine jusqu’à la vitesse zéro.
Maintenant, la séquence de phases de la tension de sortie de l’onduleur est inversée en échangeant les impulsions fatiguées entre les interrupteurs de deux jambes de l’onduleur, par exemple, entre les paires (TRL, TR4) et (TR3 et TR6) sur la figure 6.37 (a).
Cela transfère l’opération de quadrant HI (moteur inverse). La fréquence et la tension de l’onduleur sont augmentées pour obtenir la vitesse requise dans le sens inverse.