Contrôle de vitesse du moteur à induction:
Le contrôle sans étape de la vitesse des moteurs à induction ne peut pas être effectué aussi efficacement et à peu de frais que pour les moteurs à courant continu. Diverses méthodes de contrôle de la vitesse du moteur à induction peuvent être visualisées en considérant l’équation de vitesse
![]()
On voit à partir de cette équation qu’il existe deux méthodes de base de contrôle de vitesse du moteur à induction, à savoir
- Contrôler le glissement pour une vitesse synchrone fixe, et
- Contrôle de la vitesse synchrone.
Depuis

Il existe deux façons de contrôler la vitesse synchrone – contrôle de la fréquence d’alimentation et du contrôle des pôles du stator. Cette dernière méthode donne un contrôle de pas car les pôles peuvent être modifiés en plusieurs de deux. Le changement de poteau est effectué dans un moteur à cage d’écureuil uniquement et cela aussi pour deux étapes.
Contrôle de tension:
Il s’agit d’une méthode de contrôle de glissement avec une tension variable de fréquence constante fournie à la stator du moteur. De toute évidence, la tension ne doit être réduite que sous la valeur nominale.
Pour un moteur fonctionnant à un glissement à charge complète, si le glissement doit être doublé pour un couple de charge constant, il découle des équations (9.34) et (9.35) que la tension doit être réduite d’un facteur de 1 / √2 et que le courant correspondant (I’2) monte à √2 de la valeur pleine charge.
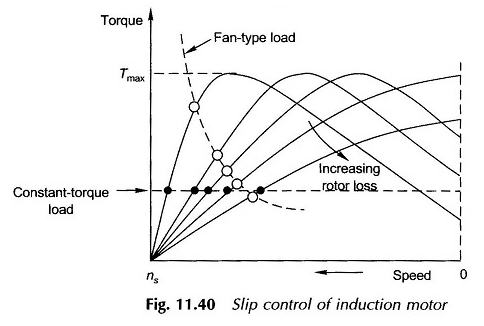
Le moteur a donc tendance à être surchauffée. La méthode ne convient donc pas au contrôle de la vitesse. Il a une utilisation limitée pour les moteurs entraînant des charges de type ventilateur dont les besoins en couple sont proportionnels au carré de vitesse (voir Fig. 11.40).
Il s’agit d’une méthode couramment utilisée pour les ventilateurs de plafond entraînés par des moteurs à induction monophasés qui ont une grande impédance d’arrêt limitant le courant dessiné par le stator.
Contrôle de résistance au rotor:
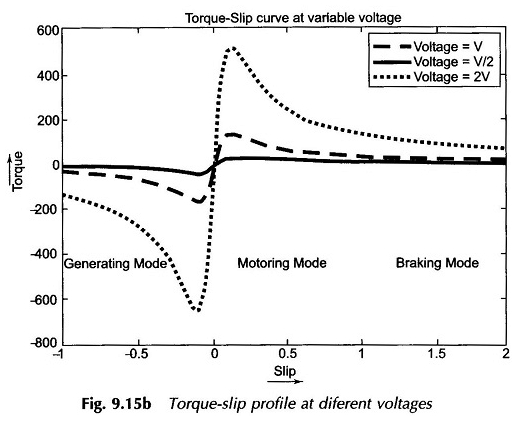
Comme son nom l’indique, ce type de contrôle de vitesse n’est possible que pour les moteurs à induction à anneau. Il est facilement vu en faisant référence à la figure 9.15 que lorsque la résistance au rotor augmente, le glissement du moteur augmente (la vitesse baisse) pour un couple de charge fixe.
Le courant du stator varie dans une mesure limitée car l’effet des changements de la résistance au glissement et au rotor a tendance à annuler (reporter à l’équation (9.34)) pour de petites valeurs de glissement. La puissance d’entrée augmente cependant. Cela prévoit la puissance perdue dans une résistance supplémentaire du rotor.
L’efficacité du moteur de fonctionnement, bien sûr, diminue fortement. Cette méthode de contrôle de vitesse en tant que telle est donc adoptée pour une plage de vitesse étroite et généralement pour une opération à court terme.

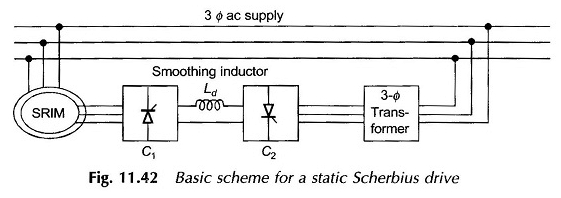
L’efficacité de ce type de schéma de contrôle de vitesse peut être améliorée en renvoyant la puissance du rotor mécaniquement à l’arbre du rotor ou électriquement vers le secteur. Le premier schéma peut être mis en œuvre par un redresseur et un moteur à courant continu couplé à l’arbre du rotor.
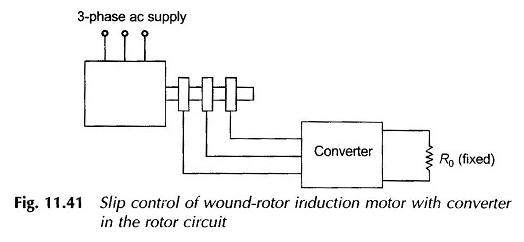
Le deuxième schéma nécessite un convertisseur de fréquence qui convertit la puissance de fréquence variable en une fréquence fixe (d’alimentation) pour ramener la puissance électrique vers le secteur. Ces schémas peuvent être conçus par les circuits SCR (voir les figures 11.41 et 11.42).
Il est possible d’atteindre des vitesses supersynchrones en injectant la puissance à la fréquence appropriée dans le rotor au moyen d’une source de fréquence réglable.
On peut voir que c’est juste l’inverse d’ajouter une résistance au rotor dans laquelle la puissance est tirée du rotor (et gaspillé dans une résistance externe).
Une grande gamme de contrôle de vitesse au-dessus et en dessous est synchrone est rendue possible en incluant un équipement de conversion en fréquence dans le circuit du rotor.
Contrôle de fréquence:
La vitesse synchrone du moteur à induction peut être contrôlée de manière sans étape sur une large plage en modifiant la fréquence d’alimentation. Selon l’équation. (9.1) Le flux d’air-randonnée résultant par pôle est donné par


Par conséquent, afin d’éviter la saturation des noyaux de stator et de rotor qui entraîneraient une forte augmentation du courant d’aimantation, le flux φR doit être maintenu constant car F est varié. Pour y parvenir, il découle de l’équation.
(9.81) que lorsque F est varié, V doit également être varié de telle sorte que (v / f) reste constant. L’alimentation variable (V, F) de l’alimentation constante (V, F) peut être organisée par la disposition du convertisseur-onduleur illustré schématiquement sur la figure 9.49 (a) qui utilise des circuits SCR. La figure 9.49 (b) montre un schéma de contrôle de vitesse alternatif à l’aide d’un convertisseur et d’un moteur à courant continu (shunt).

L’attraction principale de l’utilisation du moteur à induction pour le contrôle de la vitesse est sa robustesse, son faible coût et son fonctionnement sans entretien par rapport au moteur CC.
En raison du coût de l’onduleur impliqué dans le schéma de contrôle de vitesse du moteur à induction, le schéma de moteur à courant continu à ce jour est plus économique.
Cependant, le schéma de moteur à induction est un candidat solide pour le contrôle de la vitesse et devrait prendre le relais dans un avenir proche avec une amélioration et une réduction des coûts supplémentaires de la technologie SCR.