Contrôle de vitesse du moteur à induction triphasé:
Le problème du contrôle de la vitesse du moteur à induction triphasé en particulier est d’une grande importance pratique.
Dans un certain nombre d’industries, les moteurs doivent satisfaire à des exigences caractéristiques très strictes, à la fois en ce qui concerne la gamme et la douceur du contrôle et également en ce qui concerne le fonctionnement économique.
Du point de vue de la vue de la vitesse des caractéristiques du moteur à induction triphasé, les moteurs d’induction sont inférieurs aux moteurs à courant continu.
La vitesse d’un moteur de shunt CC peut être ajustée entre une large gamme avec une bonne efficacité et une bonne régulation de la vitesse, mais dans les moteurs d’induction, la vitesse ne peut pas être variée sans perdre de l’efficacité et une bonne régulation de vitesse.
La vitesse d’un moteur à induction est donnée par l’expression

Ainsi, il y a trois facteurs à savoir, la fréquence d’alimentation F, le nombre de pôles P et les glissement S sur lesquels la vitesse d’un moteur à induction dépend. Par conséquent, pour changer la vitesse d’un moteur à induction, il est essentiel de modifier au moins l’un des trois facteurs ci-dessus.
Les méthodes de contrôle de la vitesse du moteur à induction triphasé se distinguent en fonction de l’action principale sur le moteur: (i) du côté stator, et (ii) du côté du rotor.
Diverses méthodes de contrôle de la vitesse du moteur à induction triphasé du côté stator sont (a) la variation de la fréquence d’alimentation (b) la variation de la tension appliquée et (c) en modifiant le nombre de pôles.
Du côté du rotor, la vitesse peut être contrôlée (a) en modifiant la résistance dans le circuit du rotor et (b) en introduisant dans le circuit du rotor un EMF supplémentaire de la même fréquence que l’EMF fondamental du rotor.
Pour cette dernière méthode de contrôle de vitesse du moteur à induction triphasé, une machine électrique supplémentaire ou plusieurs de ces machines sont nécessaires.
Un ensemble composé d’un moteur à induction régulé et d’une ou plusieurs machines électriques supplémentaires qui y sont connectées électriquement ou mécaniquement est appelée cascade. Les machines de commutateurs sont couramment utilisées comme machines supplémentaires.
1. Contrôle de vitesse par variation de la fréquence d’alimentation
Cette méthode de contrôle de la vitesse du moteur à induction triphasé fournit une large plage de contrôle de vitesse avec une variation progressive de la vitesse dans toute cette plage. La principale difficulté avec cette méthode est de savoir comment obtenir l’alimentation en fréquence variable.
L’équipement auxiliaire requis à cet effet entraîne un premier coût élevé, une maintenance accrue et une baisse de l’efficacité globale. C’est pourquoi, cette méthode n’est pas utilisée pour les applications de contrôle de vitesse à usage général.
Malgré le fait que ce schéma est compliqué, il existe certaines applications dans lesquelles sa large plage de vitesse et une bonne régulation de vitesse en permanence rendent très souhaitable.
Si un moteur à induction doit fonctionner à différentes fréquences avec des valeurs pratiquement constantes d’efficacité, de facteur de puissance, de capacité de surcharge et d’un glissement absolu constant, puis, avec le fer insaturé, il est essentiel que la tension d’alimentation soit variée en proportion de la fréquence de l’alimentation.
Ce type de variation peut se produire par exemple, si le générateur d’alimentation est soumis aux variations de vitesse, soit en raison de surcharges momentanées, soit en raison d’une régulation de vitesse notable. La tension et la fréquence de sortie varient à la fois en tant que vitesse si aucune correction automatique n’est fournie.
Sur certains grands entraînements marins, les moteurs de l’hélice sont de type d’induction et sont contrôlés à la vitesse à partir d’une telle alimentation locale qui est fournie par des générateurs synchrones couplés à des turbines à vitesse variable.
Même dans de tels cas, la plage de variation de la vitesse est limitée, car l’efficacité des moteurs principaux tombe rapidement avec le changement de vitesse par rapport à ce qu’ils sont conçus.
Les courbes de vitesse de vitesse typiques pour quatre fréquences différentes sont représentées sur la figure 1.25.

2. Contrôle de vitesse par variation de la tension d’alimentation
Il s’agit d’une méthode de contrôle du glissement avec une tension d’alimentation variable de fréquence constante. Dans cette méthode de contrôle de la vitesse des moteurs d’induction, la tension appliquée au stator est variée pour varier la vitesse.
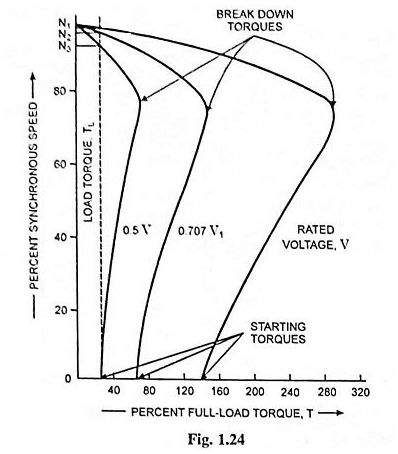
This method of speed control of three phase induction motor is simple, low in first cost and has low maintenance cost but it has limited use because (i) the operation at voltages exceeding rated voltage is restricted by magnetic saturation, (ii) a large change in voltage is required for a relatively small change in speed (iii) the developed torque reduces greatly with the reduction in supply voltage and the motor will come to standstill if the load torque exceeds the pull-out Le couple du moteur correspondant à une tension d’alimentation réduite et (iv) la plage de contrôle de la vitesse est très limitée dans la direction vers le bas, c’est-à-dire de la vitesse nominale aux vitesses plus basses.
En général, cette méthode de contrôle de la vitesse du moteur à induction triphasé est utilisée uniquement sur les charges où le couple requis tombe considérablement à mesure que la vitesse est réduite, comme avec de petits moteurs à cage d’écureuil conduisant les ventilateurs.
La tension variable peut être obtenue au moyen de réacteurs saturés, de variaques ou de transformateurs à changement de claquement.
Les caractéristiques de vitesse-Torque avec des tensions réduites sont illustrées sur la figure 1.24.
3. Contrôle de la vitesse en modifiant le nombre de pôles
Cette méthode est facilement applicable aux moteurs de cage d’écureuil car un enroulement de cage réagit automatiquement pour créer le même nombre de pôles que le stator.
Cette méthode de contrôle de la vitesse du moteur à induction triphasé n’est généralement pas possible avec les moteurs du rotor des plaies comme dans ces machines, cette méthode impliquerait des complications considérables de conception et de commutation, car les interconnexions du primaire et du secondaire devraient être modifiées simultanément de manière à produire le même nombre de pôles dans les deux enroulements. Sinon, un couple négatif sera développé par certaines des ceintures de conducteur de rotor.
Le nombre de paires de pôles dans le stator peut être modifié comme suit:
(a) En utilisant plusieurs enroulements de stator: Dans cette méthode de contrôle de la vitesse du moteur à induction triphasé, deux ou plusieurs enroulements indépendants, chaque blessure pour un nombre différent de pôles, sont placés dans les mêmes machines à sous. Le nombre de poteaux d’enroulement du stator est dans ce
cas en aucun cas interdépendamment lié et ne peut être choisi arbitrairement en fonction des conditions de fonctionnement de ce moteur.
Par exemple, un moteur à deux vitesses peut avoir deux enroulements de stator, une blessure pour 4 poteaux et un autre pour 6 pôles qui donnera des vitesses synchrones de 1 500 tr / min et 1000 tr / min avec une fréquence d’alimentation de 50 Hz.
Des moteurs avec quatre enroulements de stator indépendants sont également utilisés parfois et ils donnent quatre vitesses synchrones (et donc en cours d’exécution). Bien sûr, un enroulement est utilisé à la fois, les autres étant entièrement inopérants.
Le changement d’une vitesse à l’autre peut être effectué par un interrupteur mécanique ou par des contacteurs. Avec un tel arrangement, l’enroulement ou les enroulements qui est / ne sont pas utilisés doivent être maintenus ouverts par l’interrupteur, ou au moins laissés en étoile.
Sinon, en raison de l’action du transformateur, l’enroulement qui est connecté à l’alimentation induirait des tensions dans l’enroulement inactif et provoquerait une surchauffe due aux courants circulants suivants.
Le règlement lui-même équivaut à la modification de la vitesse du moteur en étapes, car l’un ou l’autre enroulement du stator est connecté au secteur d’alimentation.
À chaque changement, le moteur se trouve dans des conditions essentiellement analogues aux conditions de départ, c’est-à-dire un courant important et un couple réduit. En raison de conducteurs inactifs, cette méthode de changement de poteau nécessite un grand stator qu’un moteur à une seule vitesse de la même note.
Cette méthode a été utilisée pour les moteurs d’ascenseur, les moteurs de traction et également pour les petits moteurs à conduire des machines-outils.
(b) Méthode de pôle conséquente: La méthode de changement de pôle pour le contrôle de la vitesse du moteur à induction triphasé décrit ci-dessus dans (a) IE, la méthode de l’enroulement du stator multiple, est utilisée uniquement dans les petits moteurs.
Dans les grands moteurs, il est plus opportun d’employer une technique de pôle conséquente qui élimine la nécessité d’avoir plusieurs enroulements de stator pour modifier le nombre de pôles de stator.
Cette méthode de contrôle de la vitesse du moteur à induction triphasé utilise l’enroulement entier pour chaque vitesse. Normalement, pour un moteur à vitesse unique, les groupes de bobines successifs sont enroulés afin de créer des pôles de polarité opposée successivement. Ceci est illustré sur la figure 1.83, où une phase d’un enroulement à quatre pôles est développée.
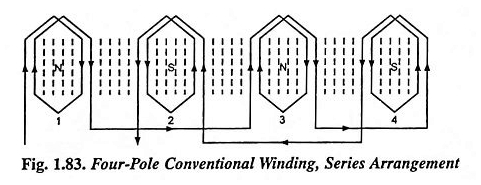
Il convient de noter que toutes les bobines sont en série, mais que les connexions finales sont établies à des groupes alternatifs, c’est-à-dire, le groupe 1 au groupe 3 et le groupe 4 au groupe 2.
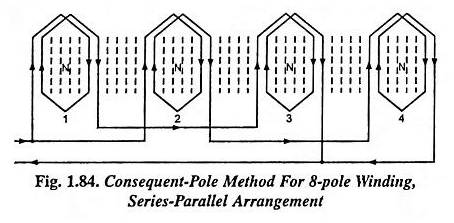
Maintenant, les connexions finales des groupes, avec les mêmes bobines, peuvent être modifiées de manière à avoir des bobines successives de la même polarité, comme illustrées sur la figure 1.84.
En parallèle aux connexions série des groupes 2-4 avec ces groupes 1-3, la polarité des groupes 2 et 4 a changé, de sorte qu’il y a maintenant quatre pôles nord successifs.
En conséquence de ces pôles sud sont créés entre chacun des pôles nord, et le moteur a désormais un enroulement à 8 pôles.
Ainsi, pour une alimentation de 50 Hz, l’agencement de la série donne une vitesse synchrone de 1 500 tr / min tandis que la disposition de la série-parallèle donne une vitesse synchrone de 750 tr / min.
Il est également possible d’utiliser un arrangement parallèle de série pour l’enroulement à 4 pôles, puis de passer à la disposition de la série pour l’enroulement à 8 pôles. Un circuit pour changer un enroulement triphasé de l’enroulement de 2 à 4 poteau est illustré à la figure 1.85.
En reconnectant tous les groupes de bobines pour la même polarité, le stator agit comme s’il avait deux fois plus de pôles que les groupes de pôles. Les pôles supplémentaires ainsi créés sont appelés les pôles conséquents, et l’enroulement est connu comme un enroulement de poteau consécutif.
Par un arrangement de commutation unique, il est possible d’avoir la connexion standard (ou conventionnelle) d’un côté d’un interrupteur à double lancement et la connexion du poteau conséquente de l’autre côté de l’interrupteur.
Ainsi, deux vitesses peuvent être obtenues, la vitesse plus élevée avec la connexion conventionnelle et la demi-vitesse avec une connexion par pôle conséquente.

Dans les moteurs utilisant la technique du pôle conséquente pour le contrôle de la vitesse, la meilleure conception possible n’est généralement pas obtenue aux deux vitesses.
Autrement dit, les caractéristiques souhaitables, telles que le facteur de puissance élevé, sont sacrifiées à une vitesse afin qu’un facteur de puissance raisonnablement bon soit obtenu à l’autre vitesse.
Parfois, les connexions du stator sont passées de Delta à Star en même temps que les connexions du poteau sont modifiées. Cela modifie la tension et rend possible un meilleur moteur à chaque vitesse.
Les moteurs à deux vitesses sont généralement fabriqués avec un enroulement sur le stator, le nombre de pôles étant modifiés dans le rapport 1: 2. Les moteurs à trois et quatre vitesses sont fournis avec deux enroulements sur les statistiques, l’un ou les deux sont fabriqués en modifiant le nombre de pôles.
Par exemple, si elle est souhaitée pour obtenir un moteur pour quatre vitesses synchrones; 1500, 1 000, 750 et 500 tr / min, deux enroulements doivent être placés sur le stator, dont l’un donnant 4 et 8 poteaux et l’autre donnant 6 et 12 pôles.
Utilisant une connexion parallèle en série de groupes de phases de phases individuelles, les phases peuvent elles-mêmes être connectées dans l’étoile / delta, ce qui entraîne un fonctionnement à deux vitesses avec les trois types de caractéristiques de vitesse de couple, à savoir le couple constant, la puissance constante et le couple variable.
En raison des complications de la conception et de la commutation de l’interconnexion des enroulements du stator, il n’est pas possible d’obtenir plus de quatre vitesses pour tout moteur grâce à cette méthode de contrôle de la vitesse. Cette méthode ne fournit pas non plus de contrôle de vitesse progressif.
C’est pourquoi, cette méthode n’est pas utilisée pour les applications de contrôle de vitesse à usage général.
Cependant, cette méthode est très satisfaisante pour les applications, telles que les ventilateurs de ventilation, les convoyeurs, les machines-outils ou d’autres applications qui nécessitent un fonctionnement à seulement deux ou quatre vitesses approximativement constantes qu’il fournira.
Cette méthode a l’avantage d’une simplicité, d’une bonne régulation de vitesse pour chaque réglage, d’une efficacité élevée et d’un coût et d’une maintenance initiaux modérés.
Le nombre de paires de pôles sur le stator peut également être modifié en utilisant la technique de modulation d’amplitude des pôles – une technique de modulation de porte-portiques supprimée.
Cette méthode de changement de poteau a l’avantage que le rapport des deux vitesses disponibles ne doit pas nécessairement être 2: 1 comme dans la méthode du pôle conséquente.
4. Contrôle d’impédance du stator
Une tension réduite aux bornes de la machine peut être obtenue en insérant des résistances ou des inductances équilibrées en série avec chaque fil de stator. Dans de telles conditions, la tension de la borne du moteur devient dépendante du courant du moteur et la tension change avec l’accélération du moteur. Les caractéristiques de couple à vitesse typique sont illustrées sur la figure 1.86.
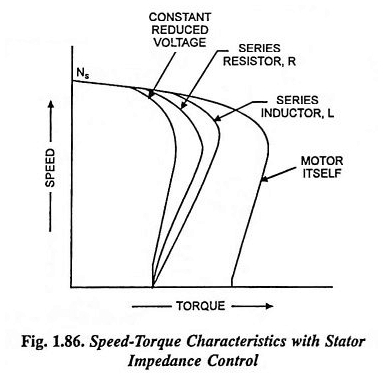
Si l’impédance (R ou X) est ajustée de manière à fournir le même couple de départ, la caractéristique de la vitesse-couple en cas d’addition d’inductance aurait un couple plus grand qu’avec une résistance supplémentaire.
En outre, ces deux caractéristiques nous permettent d’avoir des couples plus grands que ceux obtenus avec la caractéristique avec une tension appliquée réduite, pour le même couple de départ.
L’insertion de la résistance dans le circuit du stator améliore le facteur de puissance, mais au prix de plus grandes pertes d’énergie.
5. Contrôle de vitesse par variation de la résistance au rotor (ou contrôle de la résistance au rotor)
Les moteurs du rotor des plaies sont généralement lancés par la connexion des résistances de départ dans le circuit secondaire, qui sont court-circuités par étapes à mesure que le moteur accélère.
Si les valeurs ohmiques de ces résistances sont correctement choisies et si ces résistances sont conçues pour un fonctionnement continu, ils peuvent servir à double but, à démarrer et à contrôler la vitesse. Aussi évident, cette méthode peut être appliquée aux moteurs du rotor enroulé seuls.
La douceur du contrôle de la vitesse dépend du nombre d’étapes des résistances disponibles. Le contrôle est fourni dans la direction vers le bas de la vitesse de base. La plage de contrôle de vitesse n’est pas constante et dépend de la valeur de la charge.
Cette méthode de contrôle de la vitesse a des caractéristiques similaires à celles du contrôle de la vitesse du moteur de shunt DC au moyen de la résistance en série avec l’armature. Ses principaux inconvénients sont une efficacité plus faible et une mauvaise régulation de la vitesse en raison de l’augmentation de la résistance au rotor à des réglages à basse vitesse.
Par exemple, à 50% de la vitesse synchrone, l’efficacité du rotor n’est que de 50% et l’efficacité du moteur serait un peu moindre. La variation de vitesse est limitée à une plage de 50 à 100% uniquement.
Les rhéostats liquides sont préférés aux rhéostats métalliques car ils n’ont aucune inductance et les résistances peuvent être coupées en douceur en donnant un couple uniforme.
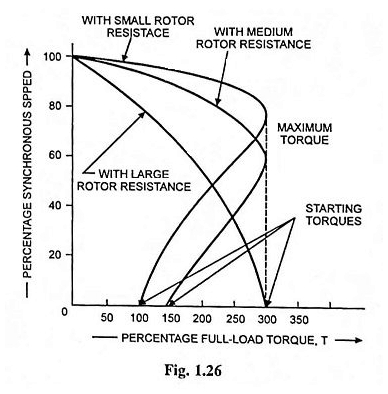
L’introduction de résistances externes dans le circuit du rotor d’un moteur à induction à anneau de glissement modifiera les caractéristiques de vitesse-couple comme illustré sur la figure 1.26.
Cette méthode de contrôle de la vitesse du moteur à induction triphasé en tant que telle ne convient donc pas pour contrôler la vitesse à un couple constant.
Mais cette méthode est largement utilisée pour les charges où le couple requis tombe considérablement à mesure que la vitesse est réduite, comme les charges de ventilateur pour lesquelles l’entrée d’alimentation baisse sensiblement lorsque la vitesse est réduite, ce qui réduit à son tour les pertes de cuivre du rotor.
De plus, cette méthode n’est pas adoptée pour un contrôle de vitesse continu mais est préférée pour un fonctionnement intermittent (court temps). Une telle méthode de contrôle de la vitesse est largement utilisée dans la pratique, pour les moteurs à faible puissance et dans les grues aériennes.
Il est parfois utilisé cependant, pour la régulation de la vitesse des rouleaux, en particulier où ils sont fournis avec des volants pour réduire les pics de charge dans le circuit.
Ici, le rhéostat, appelé régulateur de vitesse, est automatiquement allumé lorsque la charge augmente, et par conséquent la vitesse diminue et une partie de la charge est compensée au détriment de l’énergie cinétique du volant.
Inversement, lorsque la charge diminue, la résistance au circuit du rotor est réduite; La vitesse augmente et le volant commence à stocker l’énergie cinétique.
6. Contrôle de tension étrangère secondaire
Dans cette méthode, la vitesse d’un moteur à induction est contrôlée en injectant une tension de fréquence de glissement dans le circuit secondaire.
Si la tension injectée est en phase avec l’EMF induit dans le circuit secondaire, il équivaut à une diminution de la résistance dans le circuit secondaire, par conséquent, le glissement diminue ou la vitesse augmente.
Il est possible d’atteindre des vitesses super synchrones en injectant une tension de fréquence de glissement en phase avec le CMF induit dans le circuit du rotor.
Si la tension injectée est en phase opposition à l’EMF induit dans le circuit secondaire, il équivaut à augmenter la résistance dans le circuit secondaire, entraînant donc une augmentation du glissement ou une réduction de la vitesse.
Ainsi, une large gamme de contrôle de vitesse est possible par cette méthode en incluant des équipements de conversion de fréquence dans le circuit du rotor.
Dans cette méthode, les inconvénients d’une efficacité plus faible et d’une mauvaise régulation de la vitesse sont surmontés, mais, car il nécessite une et généralement plus de machines auxiliaires pour injecter une EMF de fréquence de glissement dans le circuit secondaire, par conséquent, elle est plus coûteuse et utilisée avec des moteurs de très grande note, comme pour les moteurs dans les moulins en acier.
Plusieurs méthodes ont été développées pour contrôler la vitesse des moteurs d’induction en injectant une tension de fréquence de glissement dans le circuit secondaire.
Les différentes méthodes varient dans leurs exigences pour l’équipement auxiliaire; de l’incorporation de l’équipement auxiliaire dans la conception du moteur à induction lui-même à un système assez compliqué de machines rotatives auxiliaires et de transformateurs de rapport réglable.
La critérie de base qu’un tel système doit remplir est: (i) que la tension étrangère variable a une fréquence de glissement, c’est-à-dire une fréquence égale à SF et (ii) que l’énergie associée à la tension étrangère est récupérable.
Les systèmes les plus courants basés sur ce principe sont Kramer System, LeBlanc System et Scherbius System of Speed Control of Polyphase Induction Motors.
7. Contrôle de vitesse par concaténation
Dans cette méthode, deux moteurs sont nécessaires, dont au moins l’un doit avoir un rotor de plaie. Les deux moteurs peuvent être couplés mécaniquement pour entraîner une charge commune.
Si l’enroulement du stator de l’un d’eux, un moteur de rotor de plaie, est connecté à l’alimentation en AC en triphasé, et son enroulement du rotor est connecté à l’enroulement du stator du deuxième moteur, la vitesse de la combinaison sera déterminée par la somme ou la différence du nombre de pôles dans les deux machines.
En pratique, il est habituel de connecter la sortie du rotor de la première machine au stator de la deuxième machine de telle manière que les champs tournants des deux sont dans la même direction; Dans cette condition, la vitesse résultante sera déterminée par l’expression suivante.

où
- F est la fréquence d’alimentation,
- P1 et P2 sont le nombre de pôles sur les machines I et II respectivement.
Pour obtenir une vitesse, au-dessus de la normale, le couple du deuxième moteur est inversé en modifiant simplement deux des fils du deuxième moteur. C’est ce qu’on appelle la cascade différentielle et sous cette condition de condition sera donnée par l’expression.

Un contrôle de vitesse supplémentaire, si vous le souhaitez, peut être obtenu en ayant également une deuxième machine de type de rotor de plaie et en insérant une résistance à la commande dans le circuit du rotor de la deuxième machine.

Si les deux moteurs ont le même nombre de pôles et sont connectés en cascade cumulative [Eq. (1.77)], ils fonctionneront à une moitié pratiquement à moitié. Étant donné que le couple de l’arbre est largement réduit en cascade différentielle, il n’est pas utilisé dans la pratique.
La sortie mécanique des deux machines est approximativement dans le rapport de

ou p1: p2, c’est-à-dire dans le rapport du nombre de pôles sur les machines.