Contrôle de vitesse en boucle fermée des entraînements du moteur à induction:
Un contrôle de vitesse en boucle fermée des entraînements du moteur à induction est illustré à la figure 6.43. Il utilise une boucle de vitesse intérieure avec un limiteur de glissement et une boucle de vitesse extérieure. Depuis pour un courant donné, la vitesse de glissement a une valeur fixe, la boucle de vitesse de glissement fonctionne également comme une boucle de courant interne.
En outre, il garantit également que le fonctionnement du moteur se produit toujours sur la partie de la courbe de vitesse de vitesse entre la vitesse synchrone et la vitesse au couple maximum pour toutes les fréquences, garantissant ainsi un rapport couple / courant élevé.
Le lecteur utilise un onduleur PWM nourri à partir d’une source CC, qui a des capacités de freinage régénératif et de fonctionnement à quatre quadrants. Le schéma d’entraînement est cependant applicable à tout lecteur VSI ou Cycloconverter ayant une capacité de freinage régénérative ou dynamique. Le fonctionnement du lecteur est expliqué ci-dessous.
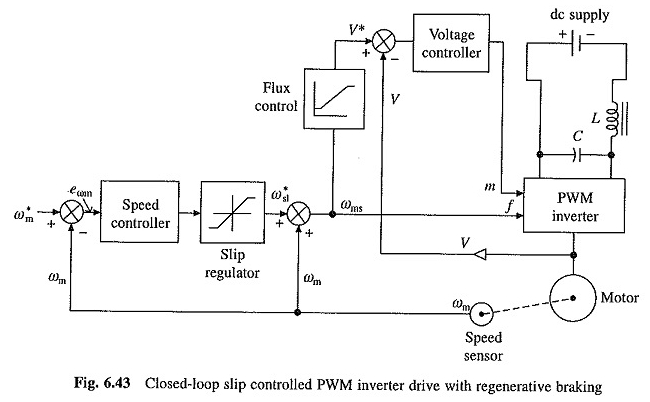
L’erreur de vitesse est traitée via un contrôleur PI et un régulateur de glissement. Le contrôleur PI est utilisé pour obtenir une bonne précision à l’état d’équilibre et atténuer le bruit.
Le régulateur de glissement définit la commande de vitesse de glissement ω * sl, dont la valeur maximale est limitée pour limiter le courant de l’onduleur à une valeur autorisée. La vitesse synchrone, obtenue en ajoutant la vitesse réelle ωm et la vitesse de glissement ω * SL, détermine la fréquence de l’onduleur.
Le signal de référence pour le contrôle de vitesse de boucle fermée des entraînements du moteur d’induction de la tension de la borne de la machine V * est généré à partir de la fréquence F à l’aide d’un générateur de fonction.
Il garantit presque une opération de flux constante jusqu’à la vitesse de base et l’opération à une tension de borne constante au-dessus de la vitesse de base.
Une augmentation de pas de la commande de vitesse ω * m produit une erreur de vitesse positive. La commande de vitesse de glissement ω * sl est définie à la valeur maximale.
Le lecteur accélère au courant maximal de l’onduleur autorisé, produisant le couple maximal disponible, jusqu’à ce que l’erreur de vitesse soit réduite à une petite valeur. Le lecteur se déforme enfin à une vitesse de glissement pour laquelle le couple du moteur équilibre le couple de charge.
Une diminution de la commande de vitesse produit une erreur de vitesse négative. La commande Slip Speed est définie à la valeur négative maximale.
Le lecteur se décélète sous freinage régénératif, au courant maximum autorisé et le couple de freinage disponible maximal, jusqu’à ce que l’erreur de vitesse soit réduite à une petite valeur.
Maintenant, l’opération se déplace vers la automobilisation et le lecteur se règle à la vitesse de glissement pour laquelle le couple du moteur est égal au couple de charge.
Le lecteur a une réponse rapide car l’erreur de vitesse est corrigée au couple maximal disponible. Le contrôle direct du glissement assure un fonctionnement stable dans toutes les conditions de fonctionnement.
Pour le fonctionnement au-delà de la vitesse de base, la limite de vitesse de glissement du régulateur de glissement doit être augmentée linéairement avec la fréquence jusqu’à ce que la valeur de répartition soit atteinte.
Ceci est réalisé en ajoutant à la sortie du régulateur de glissement un signal de vitesse de glissement supplémentaire, proportionnel à la fréquence et d’un signe approprié.
Pour les fréquences supérieures à la fréquence pour laquelle le couple de panne est atteint, la limite de vitesse de glissement est maintenue fixe près de la valeur de panne.
Lorsque une réponse rapide est nécessaire, le glissement maximal peut être autorisé à être égal au péché, car les moteurs d’induction peuvent être autorisés à transporter plusieurs fois le courant nominal pendant les opérations transitoires de courte durée.
L’onduleur et son convertisseur frontal sont construits à l’aide de dispositifs semi-conducteurs dont les cotes de courant transitoires et en régime permanent sont les mêmes. Ensuite, les notes de l’onduleur et du convertisseur avant devront être choisies plusieurs fois la cote de courant du moteur.
Cela augmentera considérablement le coût de variation. Lorsque une réponse transitoire rapide n’est pas requise, les cotes de courant de l’onduleur et du convertisseur avant peuvent être choisies pour être légèrement plus élevées que celles du moteur.