Contrôle orienté sur le terrain du moteur à induction:
Dans les disques contrôlés à glissement utilisant VSI ou CSI discuté dans les sections précédentes, la tension du stator ou le courant de stator est contrôlée à l’aide de la fréquence de glissement. Ils sont contrôlés en amplitude uniquement.
Le contrôle du courant du stator ne prend pas en charge sa position de phase par rapport au flux. Le contrôle ne fournit pas de comportement dynamique satisfaisant. Il existe une réponse oscillatoire aux changements de la fréquence du rotor.
La réponse dynamique peut être améliorée en utilisant le principe du contrôle orienté sur le terrain du moteur d’induction où le courant du stator est contrôlé à la fois en amplitude et en position de phase par rapport au flux.
Dans le contrôle orienté sur le terrain du moteur à induction, le courant du stator a la fonction de fournir du flux ainsi que du couple.
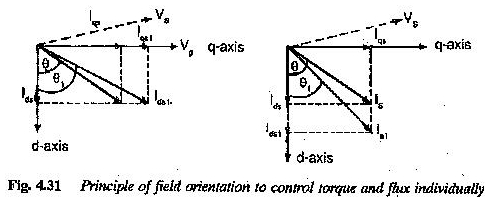
Le moteur à induction aura une opération similaire à celle d’un moteur De si les composants de courant du stator, à savoir la production de flux et la production de couple sont contrôlés séparément (Fig. 4.31).
C’est en fait le cas dans un moteur à courant continu où le couple dépend du courant d’armature et du flux sur le courant de champ. Il y a un découplage inhérent entre eux mais pour les effets de la réaction de l’armature.
Ces effets peuvent être éliminés en compensant les enroulements et il y a un découplage parfait dans un moteur CC excité séparément. Ce type de découplage est tenté dans le contrôle des moteurs d’induction. Le principe est appelé orientation sur le terrain ou contrôle du vecteur.
Ce contrôle améliore les performances dynamiques du lecteur à toutes les vitesses. Le courant du stator est décomposé en deux composants l’un le long de l’axe d et l’autre le long de l’axe Q.
Les axes de référence ont été choisis de telle sorte que le flux de rotor est complètement disponible le long de l’axe direct. Son composant quadrature est zéro.
Ainsi, le composant du courant le long de l’axe D est le composant producteur de flux et celui le long de l’axe Q est le composant producteur de couple. En faisant varier ces composants indépendamment, nous pouvons avoir un contrôle indépendant du flux et un contrôle du couple. Ceux-ci sont représentés sur la Fig.
4.31 (a) et (b). Dans le premier, la variation du flux est indiquée par une composante à axe direct variable du courant alors que dans le second la variation de la composante de l’axe Q du courant du stator est représentée.
Par conséquent, le contrôle du courant du stator équivaut non seulement à la variation de son ampleur mais aussi à son angle de phase. La méthode est donc appelée contrôle vectoriel.
Les techniques de contrôle des vecteurs utilisées pour maintenir le flux d’espace d’air constant confèrent des caractéristiques dynamiques médiocres à l’entraînement, car le couple suit la fréquence de glissement avec un retard. Des techniques ont été développées pour garder le flux de rotor constant.
Dans ces méthodes, le couple suit sans délai, améliorant ainsi le comportement dynamique. Un comportement dynamique aussi de haute qualité est nécessaire pour le contrôle orienté sur le terrain du moteur d’induction utilisé comme actionneur.
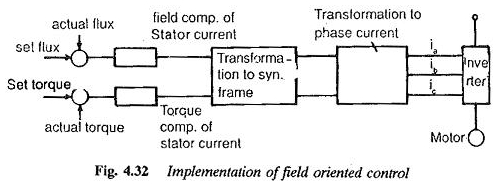
La figure 4.32 illustre la mise en œuvre du principe d’orientation sur le terrain. La valeur réelle du flux de rotor est comparée à la valeur de référence et l’erreur ainsi obtenue est utilisée pour contrôler le composant axe direct du courant.
Normalement, ce composant est maintenu constant de sorte que le flux de rotor est constant. Le composant de l’axe quadrature est contrôlé en utilisant le signal d’erreur obtenu à partir de la comparaison du couple réel et du couple de référence. Les composants sont dans le cadre rotatif de manière synchrone.
Par conséquent, le découplage entre les composants de production de flux et de production de couple du courant d’armature nécessite un système de coordonnées de référence et la transformation des quantités en ce cadre de référence et enfin dans le cadre du stator,
Dans ce contrôle, qui fournit un très bon comportement dynamique sans un coup de couple transitoire, un flux secondaire est requis, qui peut être mis à disposition de deux manières:
1.Cération directe à l’aide de bobines de détection de flux.
2. Estimation indirecte du flux à l’aide d’un modèle de machine, en utilisant des quantités terminales facilement mesurables, telles que les tensions et les courants.
La première méthode utilisant la mesure directe donne de bons résultats et est probablement la méthode de contrôle la plus précise disponible. La mesure est effectuée au moyen de bobines de recherche, de sondes de hall ou de toute autre technique de mesure du flux.
Le flux mesuré est utilisé pour effectuer le découplage requis entre les composants de production de couple et de production du flux du courant du stator. La méthode est essentiellement insensible aux variations des paramètres. Cependant, le moteur de cage perd sa robustesse et sa simplicité de construction.
Si l’on essaie de conserver la robustesse et la simplicité du moteur, le flux est obtenu en utilisant la deuxième méthode. Le flux de rotor est estimé à partir du vecteur de tension du stator, du vecteur de courant et de la vitesse du rotor. Ce flux estimé est alimenté au contrôleur de couple.
Cette approche est sensible aux erreurs dans les paramètres. La résistance au rotor, la réactance des fuites et d’autres paramètres doivent être déterminées avec précision pour atteindre une performance équivalente à la mesure directe.
Malheureusement, les paramètres du moteur utilisés dans le calcul sont déterminés à partir de tests à vide et ne représentent pas les valeurs des paramètres réellement présents au point de fonctionnement.
De plus, ces paramètres varient considérablement avec la saturation, la température, la fréquence et l’amplitude du courant. Le niveau de flux secondaire peut être modifié par la variation des paramètres. Ces variations des paramètres entraînent un contrôle de flux erroné, qui détériore les performances dynamiques.
Pour éviter les erreurs dues à la variation des valeurs des paramètres (principalement la résistance au rotor), soit en raison d’une estimation incorrecte, soit en raison de conditions de fonctionnement du moteur, l’identification ou l’adaptation des paramètres automatiques a été utilisée.
Les méthodes identifient les changements dans les performances dus à la variation des paramètres et corrigent les paramètres en conséquence.
L’erreur entre la valeur estimée du flux et le flux souhaité dans le moteur est utilisée pour corriger le paramètre le plus influent, qui est la résistance au rotor ou la constante de temps du rotor, de sorte que le modèle de machine donne la valeur requise du flux sans aucune erreur.
Une autre méthode discutée récemment est une technique en ligne pour établir la valeur exacte de la résistance au rotor du moteur d’induction. L’identification est obtenue en injectant un courant de séquence négatif et en détectant la tension de séquence négative.
La valeur de la résistance au rotor est calculée à l’aide des informations. Le contrôle orienté sur le terrain du moteur d’induction corrige la valeur de la résistance au rotor sans avoir besoin d’un capteur thermique.
Les méthodes de la rétroaction des observateurs d’État sont également utilisées pour l’identification des paramètres.
Avec l’avènement des microprocesseurs (μPS) et des micro-ordinateurs, il est aujourd’hui possible de résoudre efficacement les problèmes liés aux disques avec le système d’entraînement. Le vecteur de flux peut être très facilement déterminé.
Pour réaliser l’appariement du modèle du moteur et l’identification des paramètres du rotor par une procédure de corrélation, μPS peut être très efficace sans aucune mesure supplémentaire.
Les μPS facilitent également la mise en œuvre d’algorithmes sophistiqués pour générer des séquences de tir de l’onduleur.
En outre, le processus élaboré de contrôle orienté sur le terrain du système d’entraînement global est devenu économiquement faisable, car le matériel coûteux utilisé jusqu’à présent peut désormais être remplacé par les logiciels.
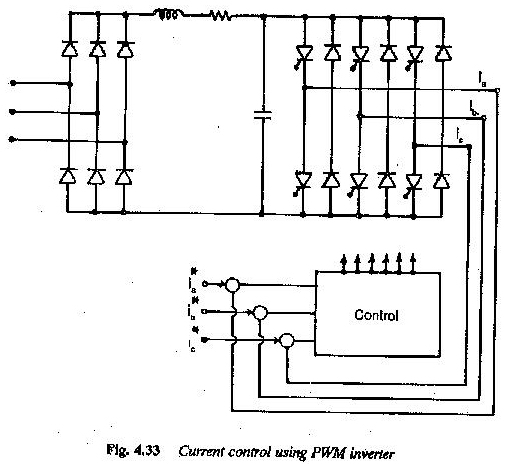
L’orientation du champ peut être très facilement mise en œuvre avec CSI alimentant un contrôle orienté sur le terrain du moteur à induction. Comme l’onduleur PWM a un bon comportement dynamique, ceux-ci sont utilisés avec un contrôle de courant du côté de la sortie.
La figure 4.33 illustre le principe du contrôle actuel à l’aide de l’onduleur PWM. Cela présente les avantages de VSI et CSI.
Motors d’induction dans le mode d’affaiblissement du flux:
Dans le cas des vitesses de moteurs à courant continu au-dessus de la vitesse de base sont obtenues en diminuant le courant de champ à une tension d’intégration constante. Le couple s’est développé diminue. Un mode de puissance constant peut être réalisé dans cette plage de vitesse et est appelé mode d’affaiblissement du flux.
Un comportement similaire peut être observé dans le cas des moteurs d’induction. La tension atteint sa valeur nominale pour la fréquence nominale. Pour les fréquences supérieures à cette valeur, la tension de l’onduleur est maintenue constante. La vitesse du moteur augmente proportionnellement à la fréquence.
En raison de l’augmentation de la fréquence, le flux d’espace d’air diminue. Le couple à une fréquence de rotor donnée est inversement proportionnel au carré de la fréquence du stator et la puissance développée n’est pas constante. Le comportement dynamique dans des conditions de flux affaiblies est très médiocre. Cela peut être amélioré par une fréquence de glissement variable pour un couple maximal proportionnel à la fréquence.
Un moteur ayant une alimentation à courant a un bon comportement dynamique lorsqu’il y a une tension de réserve aux bornes de l’onduleur.
Une fois qu’une certaine valeur de fréquence supérieure est atteinte, l’EMF arrière du moteur est égal à la tension appliquée et il n’y a pas de tension de réserve pour le contrôle du courant.
La valeur réelle du courant du stator et du flux de rotor s’écarte des valeurs souhaitées et le lecteur a un mauvais comportement dynamique. L’amélioration des performances dynamiques du moteur dans le mode d’affaiblissement du terrain est un problème d’intérêt.
Cela peut être fait en contrôlant l’amplitude du flux de rotor et donc l’EMF arrière, de sorte qu’une réserve de tension suffisante est disponible dans la plage de vitesse au-dessus de la vitesse de base. Ici également, les méthodes directes et indirectes de contrôle du flux peuvent être utilisées.