Contrôle orienté sur le terrain du moteur à induction triphasé:
Le courant du stator d’un moteur à induction a les fonctions de production du flux d’espace d’air requis (magnétisation) ainsi que de développer le couple requis pour entraîner la charge.
Un contrôle orienté sur le terrain du moteur à induction triphasé aura son fonctionnement similaire à celui d’un moteur à courant continu si les composants de courant du stator (à savoir, la production de flux et la production de couple) peuvent être contrôlés séparément.
Ce type de contrôle est possible dans un moteur CC excité séparément où le couple et le flux peuvent être contrôlés séparément et indépendamment en variant respectivement le courant d’armature et le courant de champ.
Un découplage inhérent existerait entre eux, mais pour les effets de la réaction de l’armature. Ces effets peuvent être éliminés par compensation d’armature. Un découplage parfait peut être obtenu dans un moteur CC excité séparément rémunéré.
Ce contrôle polyvalent confère un très bon comportement dynamique à un moteur à courant continu. Ainsi, un entraînement haute performance utilisant un contrôle orienté sur le terrain du moteur à induction triphasé est obtenu en tentant un découplage des composants de courant du stator.
Ce principe est appelé contrôle de l’orientation du champ ou contrôle du vecteur. Ce contrôle améliore le comportement dynamique et un entraînement de très bonnes performances peut être obtenu même à basse vitesse.
Les deux composants du courant sont identifiés et ils sont orientés correctement dans les ordonnées orthogonales par rapport au vecteur de flux.
Les composants actuels peuvent être orientés par rapport à l’un des trois flux, à savoir le flux de stator, le flux d’espace d’air ou le flux de rotor.
L’analyse montre que les performances dynamiques du lecteur ne sont pas au niveau souhaité si l’orientation est effectuée par rapport au stator ou au flux d’espace d’air. Ce mauvais comportement dynamique découle du retard du couple en suivant le glissement.
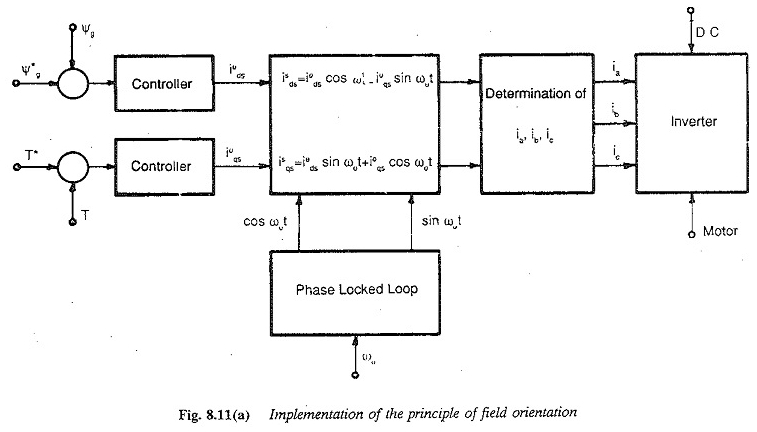
Un découplage naturel et efficace est possible si l’orientation est effectuée par rapport au flux de rotor, cela conduit à un contrôle de couple haute performance de la conduite avec une réponse très rapide. La mise en œuvre du principe d’orientation sur le terrain est illustrée sur la figure 8.11.
 Lorsque le principe de l’orientation sur le terrain a été suggéré, il n’a pas reçu l’attention de l’industrie et n’était pas très populaire en raison du matériel compliqué. Avec les développements dans les composants numériques et les microprocesseurs par le biais de LSI, et la miniaturisation des composants, ce contrôle de performance élevé du contrôle orienté sur le terrain du moteur à induction triphasé devient populaire. Un domaine principal d’application et une utilisation efficace des microprocesseurs à grande vitesse est la commande vectorielle du contrôle orienté sur le terrain du moteur à induction triphasé. Ce contrôle nécessite
Lorsque le principe de l’orientation sur le terrain a été suggéré, il n’a pas reçu l’attention de l’industrie et n’était pas très populaire en raison du matériel compliqué. Avec les développements dans les composants numériques et les microprocesseurs par le biais de LSI, et la miniaturisation des composants, ce contrôle de performance élevé du contrôle orienté sur le terrain du moteur à induction triphasé devient populaire. Un domaine principal d’application et une utilisation efficace des microprocesseurs à grande vitesse est la commande vectorielle du contrôle orienté sur le terrain du moteur à induction triphasé. Ce contrôle nécessite
- Les informations exactes sur le flux du rotor.
- Le réglage précis des composants de courant du stator en fonction de la référence.
Les fonctions d’un microprocesseur dans la commande vectorielle du moteur d’induction sont les suivantes:
- Traitement des signaux obtenus à partir du codeur d’arbre pour déterminer la vitesse du rotor et également l’angle du rotor. Cet angle de rotor doit être utilisé dans les transformations d’un cadre à l’autre.
- L’estimation du flux utilisant les tensions de terminal, les courants et la vitesse, en fonction de l’un des modèles de machine.
- Les calculs en ce qui concerne les transformations de phase et de coordonnées pour identifier les deux composantes du courant. Après le contrôle nécessaire, ces composants doivent être transformés pour fournir les valeurs de référence pour comparaison avec les courants de phase réels.
- La vitesse et les boucles de courant dans le contrôle de rétroaction. L’implémentation de contrôleurs dans ces boucles.
- Pour produire des signaux de grille pour le convertisseur côté machine et le côté de ligne, le convertisseur côté machine décide de la fréquence tandis que le côté de ligne décide le courant / tension. Les signaux de tir vers le convertisseur latéral de ligne sont obtenus de la même manière que décrits pour un double convertisseur. Les signaux de tir vers le convertisseur côté machine décident de la fréquence. La vitesse du contrôle orienté sur le champ du moteur à induction triphasé est ajoutée à la sortie du contrôleur de glissement pour décider de la fréquence de la sortie de l’onduleur. L’addition doit être précis car une grande quantité est ajoutée à une petite. L’ajout numérique dans un microprocesseur est précis. Le microprocesseur doit donc être capable de fournir ou de générer les signaux de tir vers le convertisseur côté machine également.
- Acquisition de données Le microprocesseur doit acquérir les signaux de rétroaction sous forme numérique. Un transfert des données vers le processeur est requis. Un flux des données à partir du processeur et du processeur est requis.
- Limitant les variables de contrôle linéarisation des fonctions non linéaires utilisées dans le comportement témoin ainsi que le comportement non linéaire du convertisseur pendant la conduction discontinue. La compensation du gain variable pendant les modes discontinus de conduction et d’affaiblissement du champ.
Les opérations mathématiques comprennent la multiplication, la division, l’addition et la soustraction. L’unité de traitement arithmétique du microprocesseur doit être capable d’effectuer ces opérations.
L’estimation du flux peut être effectuée par intégration numérique en utilisant la règle de Simpson bien connue ou la règle trapézoïdale. Mais les résultats souffrent d’une perte de précision due à des erreurs de troncature dans des processeurs huit bits. Ces erreurs conduisent à l’instabilité des opérations.
Utiliser I de l’arithmétique à virgule flottante avec une double précision améliore les performances du processeur. Cela nécessite cependant une longue période de calcul. Pour réduire la charge du microprocesseur, l’estimation du flux peut être emportée par des modèles analogiques externes au processeur.
Le flux calculé peut être traité dans le processeur. Les valeurs de référence des courants et des flux sont développées par le processeur.
Selon la vitesse du processeur et sa capacité à remplir les fonctions ci-dessus, une frontière peut être établie entre le matériel local et le microprocesseur, pour remplir les fonctions.
Parfois, le contrôle du multiprocesseur peut être effectué en fonction de la vitesse et de la qualité du contrôle requises.
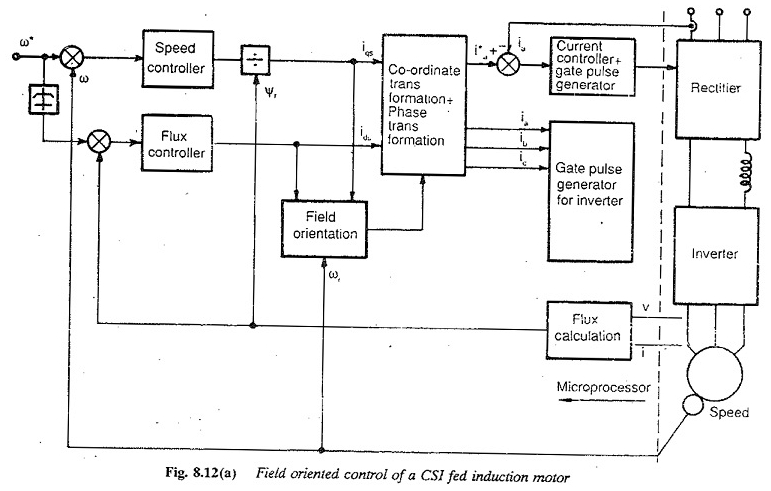
L’orientation sur le terrain est possible avec l’onduleur de source de tension ainsi que le contrôle de l’onduleur de la source de courant alimenté par le champ du moteur à induction triphasé. L’onduleur de source actuel est largement utilisé en raison de la simplicité de son circuit de puissance.
Les caractéristiques du contrôle orienté sur le terrain utilisant CSI sont discutées ici (8.12 (a)). Parfois, un onduleur PWM peut être contrôlé convenablement pour fournir les courants de référence (Fig. 8.12 (b)). Ce contrôle peut être accompli à l’aide d’un microprocesseur.

Le flux peut être mesuré directement à l’aide de bobines de recherche ou de sondes Hall. Les signaux analogiques sont convertis en numériques pour se nourrir dans le microprocesseur pour un traitement ultérieur.
Cette mesure directe, même si théoriquement exacte, a les limitations ou les difficultés suivantes: la présence de sondes de salle sensible ou de bobines de recherche rend le moteur d’induction plus sensible mais sa robustesse inhérente est perdue.
Le signal mesuré est superposé par des harmoniques de fente nécessitant un filtrage. Les erreurs de mesure et de conversion d’aide rendent les résultats assez peu fiables. Par conséquent, normalement, le calcul du FLWC à l’aide de modèles de machines est utilisé (estimation indirecte).
Ces modèles de machines pour calculer le flux utilisent le contrôle orienté sur le terrain des paramètres du moteur à induction triphasé déterminés à partir de tests de rotor sans charge et bloqué. L’inexactitude; Parmi les modèles dans l’estimation des paramètres, la variation de la machine!
Les paramètres dus à la température et à la saturation doivent être exactement pris en compte dans l’estimation. La précision est altérée en cas d’intégration impliquée dans l’estimation. Cela se produit si la tension et la vitesse sont utilisées dans le calcul.
À basse vitesse, l’intégration introduit des erreurs considérables dans ces erreurs et des performances fiables peuvent être réalisées sur une large gamme de vitesses à l’arrêt.
Pour améliorer les performances, les paramètres de la machine utilisés dans le modèle doivent être aussi précis que possible. Sinon, ils peuvent être corrigés à l’aide d’un processus de correction, afin que le couplage exact soit possible. Le processus de correction améliore le paramètre.
L’estimation du flux indirect ainsi que l’identification ou l’adaptation dite des paramètres sont utilisées pour obtenir un moteur d’induction avec un couplage parfait.
Le flux estimé à partir des variables détectées réelles du courant et de la vitesse avec les paramètres, est comparée à la valeur de référence (déterminée à partir des quantités de référence). La différence est utilisée pour corriger les paramètres de la machine entrant dans les calculs.
Le paramètre le plus influent est la résistance au rotor ou la constante de temps du rotor et elle est corrigée jusqu’à ce que la valeur requise du flux soit donnée par le modèle.
La seule solution pour le contrôle orienté sur le terrain avec adaptation des paramètres est l’utilisation de microprocesseurs ou de micro-ordinateurs. Plusieurs techniques sont disponibles dans la littérature pour l’adaptation des paramètres. Un tel schéma est illustré à la figure 8.13.
Le microprocesseur doit effectuer les opérations mathématiques pour estimer le flux à la fois des valeurs de référence ainsi que des variables mesurées.

La sélection d’un microprocesseur pour l’application ci-dessus peut être basée sur les considérations suivantes:
- Résolution du tir du redresseur contrôlé en phase. La résolution décide de l’asymétrie dans le tir.
- Les opérations mathématiques qui peuvent être effectuées. Il devrait être capable d’arithmétique binaire et décimale, y compris la multiplication et la division
- La capacité de mémoire requise
- La génération d’horloge interne
- Prise en charge du logiciel pour la mise en œuvre des contrôleurs, des limiteurs, etc.
- La capacité d’interruption
Certaines autres applications d’un microprocesseur dans le contrôle des moteurs à induction sont:
- Un microprocesseur peut être utilisé pour cohtrôle la vitesse à l’aide d’un contrôleur de tension
- Il peut être utilisé pour contrôler la vitesse à l’aide du schéma de récupération d’énergie de glissement. Le contrôle des vecteurs peut également être utilisé ici.
- Il peut être utilisé pour le contrôle du lecteur contrôlé par glissement avec le flux et le contrôle du couple dans les entraînements Fed CSI.
- Peut être utilisé pour mettre en œuvre des techniques PWM pour contrôler la tension et les harmoniques à la fois dans les moteurs à induction VSI et CSI.
- Il peut être utilisé pour le contrôle du cycloconverteur.