Contrôle vectoriel du moteur à induction:
La seule idée derrière le contrôle vectoriel du moteur à induction est d’avoir un lecteur électrique qui doit offrir des performances supérieures que le moteur CC excité séparément largement utilisé dans l’industrie.
En outre, un tel lecteur devrait également émerger comme une alternative robuste, fiable, sans maintenance et moins chère du lecteur CC. Il y a quelques années, le moteur DC excité séparément a été considéré comme un cheval de travail principal dans l’industrie.
Cela est dû à ses performances dynamiques plus rapides par rapport au moteur à induction. La réponse dynamique plus rapide du moteur CC réside dans son moteur à doublement nourri avec une installation inhérente à un contrôle indépendant du couple et du flux dans le moteur.
Avant l’introduction de la commande vectorielle du moteur d’induction, les méthodes qui jouissaient d’une large acceptabilité dans le contrôle de la vitesse de l’entraînement du moteur à induction de la cage sont appelés contrôle de tension, contrôle de fréquence, contrôle de la résistance au rotor, contrôle v / f, contrôle du flux, contrôle de glissement, contrôle de récupération de la puissance de glissement, etc.
Toutes ces méthodes de contrôle sont qualifiées de contrôle scalaire d’un moteur à induction et avec celles-ci, le moteur de cage présente des performances dynamiques inférieures par rapport au moteur de DE excité séparément.
Dans leurs efforts pour avoir un lecteur AC sans entretien, robuste et haute performance, le chercheur a voulu réaliser des performances et des caractéristiques de moteur CC excitées séparément avec un moteur à induction avec un rotor de cage.
Dans ce sens, Blaschke a introduit le concept de contrôle vectoriel du moteur d’induction. Blaschke, en 1972, a introduit le principe d’orientation sur le terrain pour réaliser les caractéristiques du moteur à courant continu dans un entraînement moteur à induction.
Pour la même chose, il a utilisé le contrôle découplé du couple et du flux dans le moteur et a donné son nom comme contrôle du transvecteur.
Le lecteur de moteur à induction de Cage avec un contrôle orienté vers le champ ou le champ offre un niveau élevé de performances dynamiques et le contrôle en boucle fermée associée à ce lecteur offre la stabilité à long terme du système.
Bien qu’il n’y ait pas de différence majeure entre les contrôles scalaires et vectoriels, ce dernier a certaines propriétés qui le rendent favorable en tant que système de contrôle avec des performances dynamiques élevées.
Le contrôle du vecteur est également appelé contrôle indépendant ou découplé dans lequel le couple et les vecteurs de courant de flux sont contrôlés.
C’est un fait bien établi que dans le mode de commande vectoriel, le lecteur de moteur de cage est linéarisé et qu’il se comporte comme un moteur à courant continu entièrement compensé séparément, dans lequel le contrôle du courant d’armature affecte directement le couple électromagnétique développé par le lecteur.
De même, dans le moteur de la cage, la méthode de contrôle du vecteur, les deux courants en quadrature responsables de la production de flux et de couple, respectivement, sont contrôlés indépendamment et la réponse du composant productrice de couple du courant est très rapide, fournissant ainsi un contrôle plus rapide du couple et donc le lecteur présente un niveau élevé de performances dynamiques.
Dans un sens large, le contrôle du moteur à induction de la cage tel qu’il se comporte comme un moteur à courant continu entièrement compensé séparément, est connu sous le nom de son vecteur.
Dans ce cas, les courants du stator sont exprimés en référence à un cadre de coordonnées qui tourne dans le synchronisme avec le vecteur de stator ou de rotor MMF.
Les courants de stator exprimés sur ces coordonnées sont résolus en deux composants orthogonaux qui produisent le flux et le couple dans le moteur. Ceux-ci sont similaires au moteur à courant continu dans lequel le couple et le flux sont contrôlés en contrôlant indépendamment les courants d’armature et de champ.
Pour contrôler le couple et le flux (ainsi de vitesse) indépendamment dans le moteur d’induction, il est nécessaire de contrôler l’amplitude et la phase des trois courants de stator (IAS, IBS, ICS) à travers un onduleur rapide.
À cette fin, normalement un CC-VSI (onduleur de source de tension contrôlé de courant) est utilisé. Un tel algorithme de contrôle serait très impliqué.
L’utilisation est faite de transformation de trois à deux phases (une opération de matrice bien connue). Les deux courants de phase, les ID et les QI étant en quadrature de phase nécessitent le contrôle des deux amplitudes et une phase qui est ce qui est effectué par le contrôle du vecteur.
Le contrôle vectoriel de la méthode du moteur d’induction est la forme du diagramme de blocs est illustré sur la figure 11.63 Certaines étapes cruciales sont les suivantes.
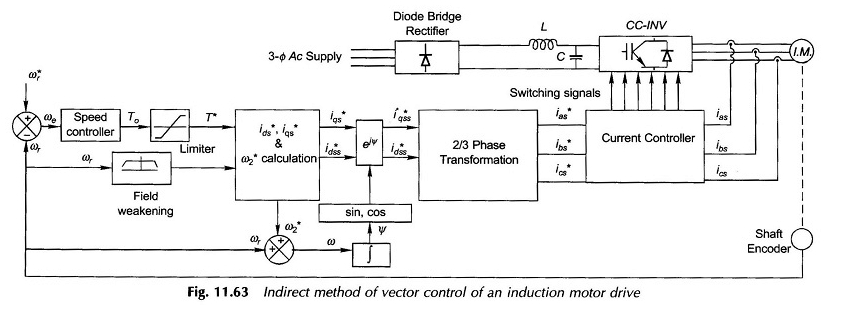
À partir du signal de vitesse du moteur (ωr) et de la vitesse souhaitée (ω * r), l’erreur ωe est déterminée. Le contrôleur de vitesse calcule le couple du moteur (à) nécessaire pour corriger la vitesse qui passe par un limiteur pour déterminer le signal de couple t *.
Dans un bloc de champ parallèle, un bloc d’affaiblissement, la vitesse du moteur ωr génère un autre signal.
Ces deux signaux sont utilisés pour calculer les i * ds et i * Qs (courants de quadrature idéaux) et une correction de vitesse ω * 2.
ω = ωr + ω * r est intégré qui est ensuite utilisé pour trouver la transformation ejψ. Cette transformation effectuée sur (i * ds, i * qs) donne le dernier ensemble idéal (i * dss, i * qss).
La transformation de phase 2/3 sur (i * dss, i * qss) donne le courant de stator idéal (i * as, i * bs, i * cs).
Les courants de stator mesurés (IAS, IBS, ICS) sont comparés à (i * As, i * bs, i * cs) par le contrôleur actuel et les six signaux générés contrôlent les courants alimentés au moteur à induction.
Ce qui précède est une explication simplifiée de l’algorithme de contrôle vectoriel pour le contrôle du moteur d’induction.
Dans le contrôle du vecteur du moteur d’induction, le flux de rotor est régulé par le contrôle du courant des enroulements du stator. Pour réguler le flux de rotor, la connaissance de sa position est également souhaitée. La position du flux de rotor est détectée ou estimée.
Par conséquent, selon les méthodologies adoptées pour évaluer la position du vecteur de flux de rotor, le contrôle du vecteur est appelé soit un contrôle de vecteur direct ou un contrôle de vecteur indirect.