Début des entraînements moteurs à induction:
Le démarrage de la disposition des entraînements du moteur à induction est choisi en fonction des exigences de charge et de la nature de l’alimentation (faible ou rigide). Il peut être nécessaire d’avoir des fonctionnalités suivantes:
- Le moteur doit développer suffisamment de couple de départ pour surmonter le frottement, le couple de charge et l’inertie du système de charge de moteur, et donc terminer le processus de départ dans un délai prescrit.
- L’amplitude du courant de démarrage doit être telle qu’elle ne provoque pas la surchauffe de la machine et ne provoque pas de baisse de la tension source au-delà d’une valeur autorisée.
Habituellement, un moteur tire 5 à 7 fois le courant nominal pendant le démarrage.
Lorsque le couple de charge pendant le démarrage et que l’inertie de charge de moteur ne sont pas importants, le début du processus des entraînements du moteur à induction est terminé en quelques secondes et, par conséquent, la température du moteur ne dépasse pas la valeur autorisée.
Dans de telles applications, le moteur peut toujours être démarré directement en ligne, à condition que la baisse de tension causée par un grand courant de départ ne soit pas au-delà d’une valeur autorisée. Pour les moteurs de petite taille, la baisse de tension dans la conduite d’alimentation est généralement en dessous du niveau acceptable.
Lorsque le moteur est de grande capacité et / ou nourri à partir d’un système faible, un certain dispositif de départ devient nécessaire pour réduire le courant de départ. Dans ces applications, peu importe si la réduction du courant de démarrage s’accompagne d’une réduction du couple de démarrage.
Lorsque le couple de charge pendant le démarrage est élevé ou que l’inertie de charge est importante, le début du processus des entraînements du moteur à induction prend longtemps. Si le moteur transporte un courant important pendant le démarrage, il sera endommagé en raison d’une surchauffe. Par conséquent, le moteur ne peut pas être démarré directement en ligne.
Dans ces cas, les méthodes de démarrage qui permettent une diminution du courant de démarrage sans diminution du couple de démarrage sont utilisées. Dans certaines applications, une augmentation du couple de démarrage accompagnée d’une diminution du courant de démarrage peut être nécessaire.
Dans un moteur à cage d’écureuil, certaines mesures d’amélioration des performances de démarrage peuvent. être pris au stade de conception, comme en cas de moteurs à cage d’écureuil élevé et à barre profonde et à double cage. En cas de besoin, les méthodes utilisées pour démarrer les moteurs à cage d’écureuil sont:
- Star-delta starter
- Démarreur de transformateur automatique
- Démarreur du réacteur
- Démarreur de réacteur saturable
- Part de partage en partie
- Démarreur de contrôleur de tension AC
- Le démarreur de résistance au rotor est utilisé pour le démarrage du moteur du rotor de plaie:
Les méthodes (1) – (5) et (7) sont décrites ici et la méthode (6) dans Sec. 6.11.
Star-Delta Starter:

Dans cette méthode, un moteur à induction conçu pour fonctionner normalement avec la connexion Delta est connecté en étoile pendant le démarrage. Cela permet de réduire la tension du stator et le courant de 1 / √3.
Étant donné que le couple du moteur est proportionnel au carré de la tension du borne du stator, le couple de démarrage est réduit à un tiers. Un circuit pour le démarrage d’étoile-delta est illustré à la figure 6.7. Les disjoncteurs CBM et CD sont fermés pour démarrer la machine avec la connexion étoile. Lorsque la vitesse en régime permanent est atteinte, CBS est ouvert et que CBR est fermé pour connecter la machine dans Delta.
Démarreur de transformateur automatique:
Une tension réduite pour le démarrage peut également être obtenue à partir d’un transformateur automatique. Pour un rapport de virage secondaire à primaire de l’AT, la tension de la borne du moteur et le courant du stator sont réduits par AT. Cela réduit le courant tiré de l’alimentation par A2T.
Étant donné que le couple est proportionnel au carré de tension de borne du moteur, il est également réduit par A2T. Une fois le moteur accéléré, il est connecté à la tension d’alimentation complète. Un circuit de démarrage de transformateur automatique est illustré à la figure 6.8 (a). Premièrement, CBS1 est fermé suivi par CBS2.
Lorsque le moteur s’est accéléré à pleine vitesse, CBS2 est ouvert et CBM fermé. Désormais, CBS1 est ouvert pour déconnecter l’auto-transformateur de l’alimentation.
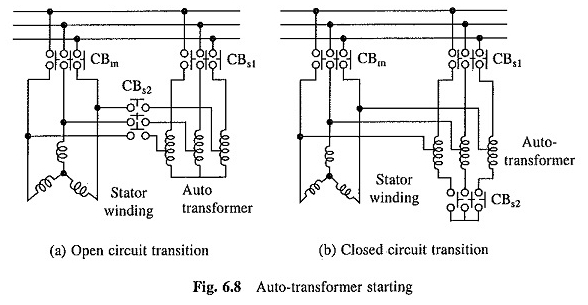
Transition de circuit fermé:
Dans les méthodes de démarrage Star-Delta et Auto-Transformateur, le passage de la basse tension à la connexion pleine tension perturbe le flux du courant du stator et le champ du stator s’effondre. Le courant du rotor continue de s’écouler en raison de sa grande constante de temps.
Le champ produit par les courants de rotor induit des tensions dans les enroulements du stator. La phase des tensions induites est indépendante des tensions d’alimentation. Un grand courant de courant est produit au moment de la reconnexion lorsqu’il est induit et que les tensions d’alimentation sont hors de phase.
Lorsque le courant actuel n’est pas acceptable, la transition de circuit fermé est utilisée. Un schéma de transition en circuit fermé pour un démarreur de transformateur automatique est illustré à la figure 6.8 (b). Il utilise trois disjoncteurs: CBS1, CBS2 et CBM.
Le premier CBS2 est fermé pour fermer la connexion du point d’étoile de l’auto-transformateur. CBS1 est fermé ensuite. Cela complète la connexion basse tension de l’auto-transformateur et le moteur démarre. Une fois la vitesse à l’état d’équilibre atteint, le disjoncteur de circuit CBS2 est ouvert.
Le moteur fonctionne désormais avec la partie supérieure des enroulements de phase de transformateur automatique en série avec le stator. Les enroulements fonctionnent simplement comme des réacteurs en série. Désormais, CBM de disjoncteur est fermé, ce qui contourne les réacteurs de la série et relie le moteur directement à l’alimentation.
Au début de commencer alternativement, le premier CBS1 est fermé au lieu de CBS2. Ensuite, le moteur et le transformateur ne produiront pas simultanément la surtension du courant magnétisant.
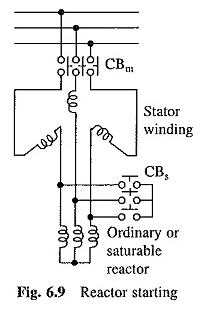
Démarreur du réacteur:
Le courant de démarrage peut également être réduit en connectant un réacteur triphasé en série avec stator.
Lorsque le moteur atteint la pleine vitesse, le réacteur est contourné. La figure 6.9 a montré un tel schéma. CBM est fermé pour démarrer la machine. Une fois que la vitesse complète est atteinte, CBS est fermé pour court-circuiter le réacteur. Il est avantageux de connecter le réacteur à l’extrémité neutre de l’enroulement du stator.
Cela minimise sa cote de tension et maintient également sa tension et la tension de CBS de disjoncteur au potentiel neutre pendant le fonctionnement du moteur normal.
Début de Soft Utilisation du réacteur satuble:
Dans certaines applications, le couple de départ doit être contrôlé sans pas. Par exemple, dans les machines textiles, elle doit être variée en douceur, sinon les fils de fibre se casseront pendant le démarrage. Un tel arrangement de départ est appelé démarrage en douceur.
Le schéma du contrôleur de tension de thyristor est désormais largement utilisé pour le démarrage. Un certain nombre de disques existants utilisent également un démarreur de réacteur satuable dans lequel un réacteur satuable triphasé est connecté en série avec le stator. Le réacteur sature a un enroulement de contrôle DC.
La réactance du réacteur satuble peut être variée sans pas en modifiant le courant de l’enroulement de contrôle. Pour le démarrage, la réactance est initialement définie à la valeur la plus élevée. Le couple de démarrage est proche de zéro. La réactance est désormais réduite en douceur en augmentant le courant de l’enroulement de contrôle.
Cela donne une variation sans étape du couple de départ. Par conséquent, le moteur commence sans conjurer et accélère en douceur.
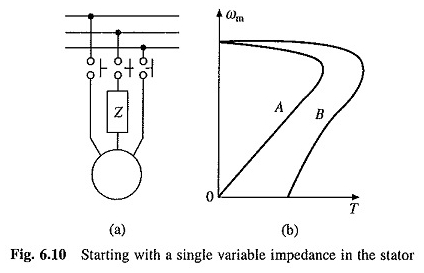
Schéma de démarrage déséquilibré pour le démarrage souple:
Pour le démarrage sans fonction, une alternative moins chère montrée sur la figure 6.10 (a) peut également être utilisée. Il se compose d’une impédance variable Z dans l’une des phases de la machine.
Lorsque l’impédance est très élevée, la machine fonctionne avec un phasage unique et sa caractéristique de vitesse-couple est similaire à la caractéristique de la figure 6.10 (b), avec un couple de départ nul.
Lorsque l’impédance est complètement retirée, la courbe de couple de vitesse est similaire à la caractéristique B, qui est la caractéristique naturelle de la machine. Pour les valeurs intermédiaires d’impédance, la courbe de vitesse de vitesse se situe entre les courbes A et B.
Un début fluide, sans secousse, est atteint lorsque l’impédance est contrôlée sans pas. L’impédance peut être une résistance variable ou un réacteur satuable monophasé.
Le moteur fonctionne avec des tensions de stator déséquilibrées, par conséquent, les pertes de cuivre augmentent. Ainsi, ce schéma ne convient qu’à un fonctionnement court.
Démarrage de l’enroulement de partie:
Certains moteurs à cage d’écureuil ont deux enroulements de stator ou plus qui sont connectés en parallèle pendant le fonctionnement normal. Au début, un seul enroulement est connecté. Cela augmente l’impédance du stator et réduit le courant de départ. Un tel schéma de départ s’appelle le départ de la partie.
Son implémentation pour une machine avec deux enroulements de stator est illustrée à la figure 6.11. La machine commence par l’enroulement 1 lorsque CBM est fermé. Une fois la vitesse complète atteinte, CBS est fermé pour connecter l’enroulement 2.

Démarreur de résistance au rotor:
Les moteurs à rotor des plaies sont généralement démarrés par connexion des résistances externes dans le circuit du rotor (Fig. 6.12 (a)). La valeur la plus élevée de résistance est choisie pour limiter le courant à une vitesse nulle dans la valeur sûre.
À mesure que le moteur accélère, les sections de la résistance externe sont découpées un par un en fermant les contacts C1, C2 et C3 afin de limiter le courant du rotor entre des valeurs maximales et minimales spécifiées (Fig. 6.12 (b)).

Étant donné que la majeure partie de la perte de cuivre du rotor se produit dans des résistances externes, l’élévation de la température du rotor pendant le démarrage est sensiblement plus faible par rapport aux méthodes de départ décrites précédemment.
La caractéristique importante de cette méthode de démarrage de moteur d’induction est que le couple de départ et le rapport couple / courant sont élevés.
Il est donc adapté aux applications nécessitant une accélération rapide, des départs et des arrêts fréquents, en commençant par une charge intense et en commençant par une charge d’inertie élevée.
Alors que le couple maximal est indépendant de la valeur de résistance au rotor (Eq. (6.13)), la vitesse à laquelle le couple maximal est produit peut être contrôlé en modifiant la valeur des résistances externes (Eq. (6.12)). Les résistances externes peuvent donc être variées pour accélérer la machine à un couple maximal.