Entraînement à moteur à induction nourri à l’onduleur de l’onduleur:
Lecteur de moteur à induction nourri à la source de courant – Dans un onduleur de source de tension, le moteur d’induction nourri à l’induction, la tension appliquée au stator est proportionnelle à la fréquence, avec une correction pour la chute de résistance du stator, en particulier à basse vitesse, pour maintenir le flux constant.
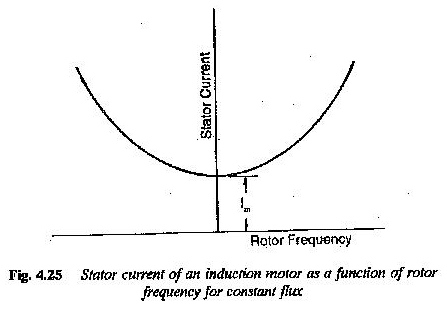
C’est un fait très connu que le courant tiré par un moteur à induction ne dépend pas de la fréquence du stator lorsque le flux d’espace d’air est constant. Il existe une relation fixe entre la fréquence de glissement et le courant du stator pour le flux nominal dans l’espace d’air, comme le montre la fig.
4.25. En contrôlant le glissement du moteur, le courant du stator peut être contrôlé. Un contrôle de flux indirect est donc possible. Le contrôle est plus simple que le contrôle de tension. La courbe entre la fréquence de glissement et le courant du stator peut être calculée à l’aide du circuit équivalent. Un onduleur PWM peut être contrôlé pour fournir les courants souhaités dans le moteur.
Dans un convertisseur de liaison CC, si le courant de liaison CC est contrôlé, l’onduleur est appelé onduleur source actuel. Le courant dans la liaison CC est maintenu constant par une inductance élevée et la capacité du filtre est distribuée.
La tension de liaison CC variable est convertie en un moteur d’induction nourri à l’onduleur de l’onduleur à source de courant au moyen de l’inductance. L’offre DC est de grande impédance.
Comme le courant de liaison est maintenu constant, la forme d’onde de courant de sortie est déterminée par le fonctionnement de l’onduleur, tandis que la tension de sortie est déterminée par la nature de l’impédance de charge.
Un moteur à induction nourri à l’onduleur à l’onduleur actuel convient aux charges qui présentent une faible impédance aux courants harmoniques et ont unité PF
Un moteur à induction nourri à l’onduleur de l’onduleur actuel a une configuration très simple. Aucune diodes de rétroaction n’est requise. Un redresseur contrôlé en phase est utilisé du côté de la ligne pour fournir un contrôle de courant.
Comme la liaison CC ne contient que l’inductance, la régénération est possible en modifiant la polarité des tensions et en maintenant la direction de courant. Par conséquent, un lecteur de quatre quadrant est simple et simple.
Il fournit une mise en mémoire tampon efficace de la sortie de l’onduleur à partir des variations de tension d’alimentation. Le contrôle direct du courant du stator permet d’implémenter un contrôle de boucle fermé précis avec une facilité relative.
La commutation de l’onduleur dépend de la charge. Les paramètres de charge font partie du circuit de commutation. Une correspondance est donc requise entre l’onduleur et le moteur. Le fonctionnement multimotor n’est pas possible.
L’onduleur doit nécessairement être une force commune, car le moteur à induction ne peut pas fournir la puissance réactive de l’onduleur.
Le courant de liaison CC constant peut s’écouler à travers les phases du moteur par le contrôle de l’onduleur, et donc le courant du moteur est une onde quasi-carré. La tension du moteur est presque sinusoïdale avec des pointes superposées, en raison de la commutation.
Ces pics de tension décident de l’évaluation de la tension des Thvristors et affectent également l’isolation du moteur. Ces pointes peuvent être limitées si la machine a une petite réactance de fuite ou si les condensateurs de communication sont grands.
Une machine avec une réactance de fuite plus petite convient au fonctionnement du moteur d’induction de l’onduleur de l’onduleur de la source de courant pour maintenir les pics de tension et les pertes harmoniques au minimum. L’effet des pulsations de couple diminue et la fréquence de fonctionnement peut être augmentée.
La capacité de commutation est choisie pour faire un compromis entre les pointes de tension et la fréquence de fonctionnement la plus élevée. La commutation nécessite un courant minimum définitif. L’onduleur a la capacité de se remettre d’un échec de commutation.
L’inductance de liaison provoque une lente augmentation du courant de défaut et au moment où il atteint des valeurs élevées, le défaut peut être éliminé.
Le lecteur pose des problèmes de stabilité à des charges légères. Le fonctionnement de la boucle ouverte n’est pas possible. Il a une très large gamme de contrôle de vitesse, mais les performances dynamiques sont médiocres.
Le moteur d’entraînement nécessite un rétrécissement en raison de pertes harmoniques et de chauffage associé. Des pulsations de couple sont présentes et leur amplitude est grande à basse fréquence de fonctionnement, en raison des harmoniques supplémentaires dans le flux du rotor. Le facteur de puissance de la ligne est médiocre, en raison du contrôle de phase.
Jusqu’à la fréquence nominale, le lecteur est en mode de couple constant et au-dessus de la fréquence nominale que le lecteur est en mode de puissance de cheval constante.
Le courant du stator d’un moteur à induction fonctionnant sur une fréquence variable, l’alimentation de tension variable est indépendante de la fréquence du stator si le flux de la forme de l’air est maintenu constant. Cependant, il est fonction de la fréquence du rotor.
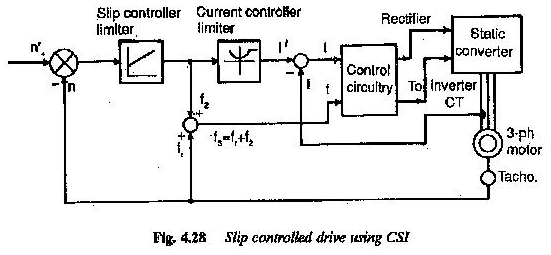
Le couple développé est également fonction de la fréquence du rotor uniquement. En utilisant ces caractéristiques, un lecteur contrôlé par glissement (Fig. 4.28) peut être développé en utilisant un onduleur de source actuel pour alimenter un moteur à induction.
La relation entre la fréquence du rotor et le courant du stator pour le flux nominal dans l’aérogap est introduite dans le contrôle. Ainsi, un contrôle indirect du flux est possible. La sortie du générateur de fonctions donne la valeur de référence du courant.
Le courant mesuré est comparé à la valeur de référence et l’erreur est utilisée pour modifier l’angle de tir du convertisseur contrôlé en phase du côté de la ligne.
L’entrée du générateur de fonction est la différence entre la vitesse de référence et la vitesse réelle et elle peut être considérée comme une fréquence de glissement qui est ajoutée à la fréquence correspondant à la vitesse du rotor, ce qui donne la valeur de la fréquence du stator et l’onduleur côté machine est contrôlé pour donner cette fréquence.
Le contrôle est opérationnel jusqu’à ce que le rotor atteigne la vitesse souhaitée avec la fréquence de glissement requise.
Le lecteur contrôlé par glisser présente les avantages suivants:
1. Le lecteur de glissement contrôlé est très efficace.
2.Précise Le contrôle du couple est possible sur une large plage de vitesse.
3.La fréquence de glissement peut être n’importe quelle valeur jusqu’à la valeur correspondant au couple de panne. L’opération est à un très bon facteur de puissance. L’opération est très stable.
4.Le rotor peut être accéléré à un couple constant et au courant en maintenant la fréquence du rotor à une valeur appropriée. Accélération rapide.
5.Com que cela conduit au démarrage doux que le moteur ne voit pas les courants de rotor bloqués et les bordereaux de tension associés ne sont pas là.
6. Les rotors spéciaux avec un couple de démarrage élevé ne sont pas nécessaires. Des rotors à faible résistance peuvent être utilisés pour que les pertes soient limitées.
7. Le freinage régénératif peut être incorporé. Le freinage à un couple constant est possible.
8.Le lecteur a une efficacité comparable à un lecteur CC thyristorisé.
Les avantages supplémentaires des moteurs à induction de la cage d’écureuil comme le rapport puissance / poids élevé, moins d’entretien, une faible inertie, aucune limitation sur les gammes de puissance et les gammes de vitesse, font du slip contrôlé le disque un véritable concurrent vers les lecteurs du moteur DC.
Des méthodes d’élimination harmonique sélectionnées ou des principes PWM peuvent être utilisés pour réduire les effets des pulsations de couple, en particulier à basse vitesse.
Dans ces méthodes, le contrôle peut être obtenu en contrôlant le courant de liaison CC et le principe PWM peut ensuite être utilisé uniquement pour contrôler le contenu harmonique de la forme d’onde actuelle.
Cette séparation des fonctions de contrôle actuelle et harmonique permet au choix de la stratégie de contrôle PWM qui se dirige uniquement d’améliorer les pulsations du couple moteur et de réduire les pertes harmoniques.
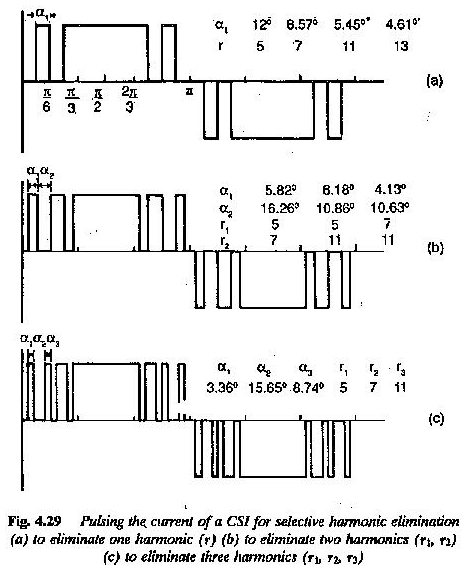
La majorité des stratégies PWM pour un moteur à induction nourri à l’onduleur source actuel sont basées sur des techniques d’élimination harmonique sélectionnées.
Ils sont utilisés pour éliminer les harmoniques d’ordre inférieur du courant du stator et les méthodes entraînent l’élimination des ondulations de couple d’ordre inférieur (Fig. 4.29).
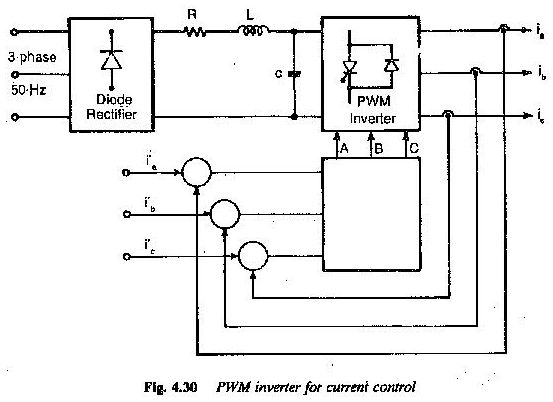
Ces dernières années, les stratégies de PWM ont été spécialement développées pour minimiser l’ondulation de la vitesse du rotor en raison de la pulsation du couple, pour entraîner un entraînement ayant une rotation lisse à basse vitesse (Fig. 4.30).
Les caractéristiques générales du moteur d’induction nourri à l’onduleur de l’onduleur de courant peuvent être résumés comme suit:
1. Télécharger Commutation dépendante: Comme les paramètres de charge font partie du circuit de commutation, l’onduleur et le moteur doivent être appariés.
2. L’onduleur a une configuration simple. Les FWD sont absents.
3.Un opération de moteur unique
4. Le lien CC ne contient que l’inductance. Pour maintenir un courant constant, cela doit être très important. L’opération de deux quadrants est simple
5.Invariablement, un redresseur contrôlé en phase est requis du côté de la ligne. La tension de liaison CC variable est convertie en une source de courant constante au moyen d’une inductance de liaison élevée.
6.Le onduleur est communé de force pour donner des courants de fréquence variables pour alimenter le moteur.
7.La valeur de la capacité est un compromis entre les pics de tension et la fréquence de fonctionnement la plus élevée. La capacité est plus grande, la tension est plus petite, la fréquence de fonctionnement la plus élevée est également limitée.
8.La réactance des fuites du moteur influence les tensions harmoniques. Il est également responsable des pics de tension pendant la commutation.
La réactance des fuites étant un paramètre du circuit de commutation, détermine l’heure de la commutation, et par conséquent la fréquence opérationnelle supérieure est limitée.
Un moteur doit avoir une réactance de fuite plus petite pour réduire les tensions harmoniques et les pics de tension et augmenter la plage de contrôle de la vitesse. Les pics influencent l’évaluation du thyristor et affectent l’isolation. La taille du moteur devient plus grande si la réactance des fuites est petite.
9.Converter Les thyristors de qualité sont suffisants. L’utilisation du thyristor est bonne
10.L’onduleur se rétablit de l’échec de la commutation. L’inductance de liaison provoque une lente augmentation du courant de défaut et au moment où elle atteint une valeur élevée, elle peut être supprimée.
11.Il y a un problème de stabilité à charge légère. Un courant minimum devrait être là pour la commutation.
12.Les fonctionnalités de boucle d’ouvre ne sont pas possibles. La réponse dynamique est lente
13.La ligne PF est médiocre en raison du contrôle de phase.
14.FINDS L’application comme entraînement moyen à élevé
15.Torque Les pulsations provoquent des oscillations de vitesse à des vitesses très basse. Des stratégies PWM sont utilisées pour éliminer les oscillations de vitesse et rendre le fonctionnement en douceur.
16.Te le couple constant et les opérations de puissance de chevaux constantes sont possibles.