Características de velocidad de torque del motor de inducción:
De la ecuación. 1.27 Se puede observar que el par máximo es independiente de la resistencia del rotor. Sin embargo, el cambio en el que ocurre el par máximo cambia con la resistencia del rotor.
Cuando aumenta la resistencia del rotor, el deslizamiento para el torque máximo también es el torque máximo y el rango de operación estable del motor aumenta. Las características típicas de la velocidad del par motor de inducción para diferentes valores de resistencia al rotor se representan en la Figura 1.22.
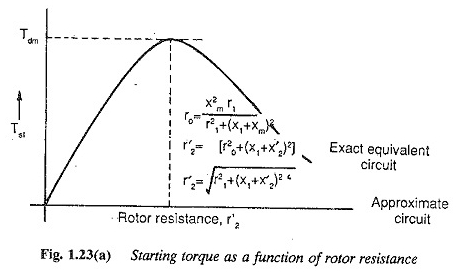
De la figura, observamos que el par inicial se puede aumentar aumentando la resistencia al rotor. El par máximo ocurre al inicio, si la resistencia al rotor aumenta a un valor.

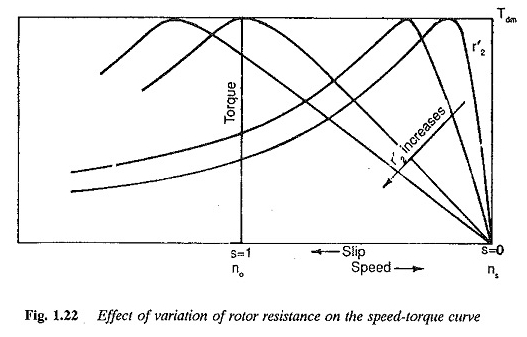
Si se descuida la impedancia del estator, la resistencia del rotor debe aumentarse a un valor igual a la reactancia de las fugas del rotor. Si la resistencia del rotor aumenta más allá de este valor, el par inicial disminuye.
El par de falla ocurre en portaobjetos mayores que uno (en la región de frenado). La corriente de arranque disminuye y el factor de potencia de inicio es mejor para un aumento de los valores de resistencia al rotor.
El cambio de carga completa cambia, facilitando el control de velocidad en un rango limitado cuando la resistencia al rotor varía. Sin embargo, la eficiencia se altera a altas resistencias al rotor debido a un aumento en las pérdidas. El calentamiento del rotor está presente en un rotor de resistencia intrínsecamente alta.
En resumen, el rendimiento de arranque del motor se mejora con grandes resistencias al rotor, mientras que el rendimiento de las carreras se altera.
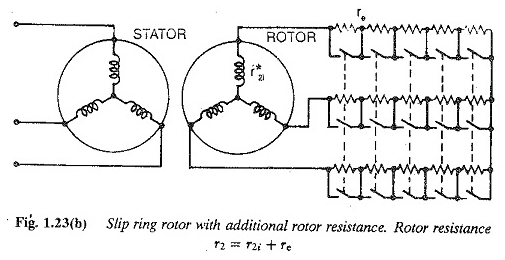
Para obtener las ventajas de alta resistencia al rotor al arranque, se conecta resistencia adicional en el circuito del rotor del motor de inducción del controlador de la herida y se corta lentamente a medida que el rotor se acelera. A una velocidad nominal, el motor funciona en su característica natural. Las conexiones se representan en la Figura 1.23 (b).
Sin embargo, la conexión de resistencia adicional no es posible en los motores de jaula de ardilla. Se utilizan construcciones de rotores especiales, como rotores de doble jaula y barra profunda.
Al principio, debido a la alta frecuencia del rotor, la corriente se distribuye en la jaula externa de un rutor de doble jaula o en la parte superior de la barra en el caso de un rotor de barra profunda. El efecto de la alta resistencia se alcanza así.
A medida que el motor se acelera, la frecuencia del rotor disminuye y la corriente se distribuye en las dos jaulas del rotor de doble jaula o en la barra completa en el rotor de la barra profunda. La resistencia efectiva es pequeña y el rendimiento de la carrera se mejora. Las curvas de velocidad de torque típicas se representan en la Figura 1.23.
Efecto de la variación de voltaje en el motor de inducción:
La velocidad clave característica de un motor de inducción puede modificarse por el efecto de la variación de voltaje en el motor de inducción. Las características típicas de la velocidad del par motor de inducción cuando se proporcionan desde voltaje variable a la frecuencia nominal se dan en la Figura 1.24 (a).
Se basan en el hecho de que el par del motor de inducción (con un portaobjetos dado) varía como el cuadrado de la tensión. El cambio para el par máximo es independiente de la tensión. El par de carga completa ocurre en diferentes cambios cuando el voltaje varía.
Esto hace que el control de velocidad de los motores de inducción sea factible en un rango limitado por variación en el voltaje de suministro. Sin embargo, la capacidad del torque del motor disminuye a bajo voltaje, debido a la reducción del flujo del espacio del aire. El factor de potencia disminuye.
El motor atrae corrientes pesadas para desarrollar un par de un par bajo voltaje. La corriente dibujada a diferentes voltajes se ilustra en la Figura 1.24 (a), así como el par desarrollado a una corriente nominal a diferentes voltajes.
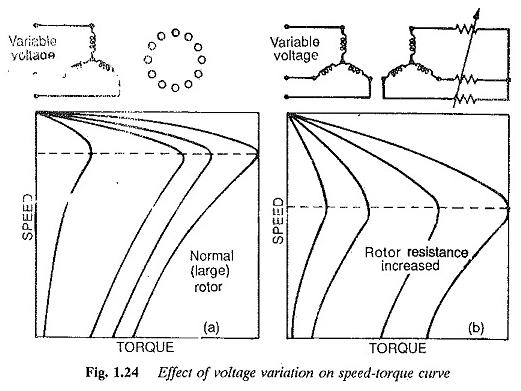
La Figura 1.24 (b) muestra las ventajas de alta resistencia en el rotor cuando el voltaje aplicado varía para modificar la característica de velocidad de velocidad.
Además de aumentar el rango de control de velocidad, la corriente dibujada por el motor de bajo voltaje puede estar limitado por una opción apropiada de resistencia al rotor.
Cambio de poste en el motor de inducción:
La curva de velocidad de velocidad de un motor de inducción puede modificarse mediante un devanado de refuerzo reconectado para dar diferentes conjuntos de postes. Cuando el número de postes que cambia en el motor de inducción, lo mismo ocurre con la velocidad.
El tipo de conexión decide la carga autorizada a un par constante o una potencia constante. Este método de cambio de publicación en el motor de inducción es adecuado para motores de jaula de ardilla porque sus rotores pueden adoptar un cierto número de polos. No se requiere reconexión del devanado del rotor.
Si, por otro lado, se usa un rotor de anillo deslizante, debe reconectarse a diferentes conjuntos de postes. El devanado posterior a la publicación se usa para la reconexión. El paso de la bobina cambia de manera efectiva a diferentes velocidades.
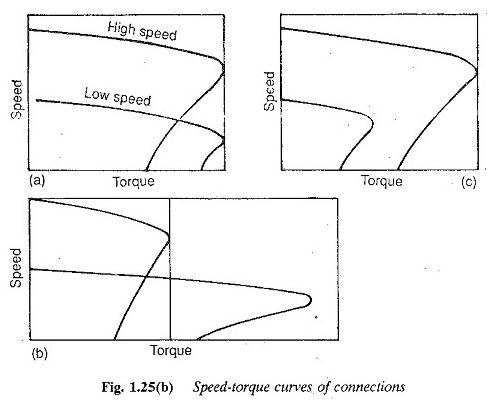
Cada fase tiene un devanado dividido en mitades. Estos están conectados en serie o en paralelo, para modificar de manera efectiva el número de polos. Las posibles combinaciones se representan en la Figura 1.25.
El funcionamiento de la potencia constante es proporcionado por la conexión Serie-Delta para altas velocidades y la estrella paralela para bajas velocidades. A altas velocidades, se desarrolla un par débil para que la potencia sea constante. El voltaje por mitad es V / 2 en la conexión de alta velocidad y V / √3 a baja velocidad.
Conexiones paralelas y series de series para altas velocidades para velocidades altas y bajas
Recuperación de energía deslizante del motor de inducción:
La modificación de la característica de las líneas de velocidad utilizando una resistencia variable del rotor presenta el mayor inconveniente de la mala eficiencia, lo que lo hace no rentable. La operación a baja velocidad no es posible debido al sobrecalentamiento del rotor.
Estas bajas velocidades pueden hacerse de manera muy efectiva con una eficiencia razonable utilizando patrones de recuperación de energía de deslizamiento. La potencia deslizante que se desperdicia en la resistencia externa en el circuito del rotor se devuelve al sector de estos diagramas.
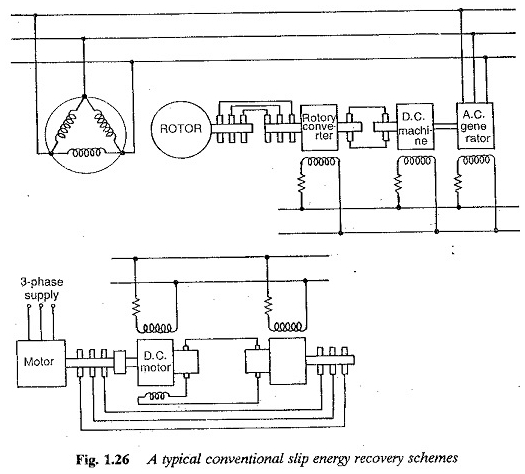
Los métodos convencionales de recuperación de energía deslizante utilizan máquinas giratorias, como convertidores rotativos, alternadores, máquinas de CC, etc. en el circuito del rotor para convertir la potencia en la frecuencia de potencia en la frecuencia de potencia a la línea. Ciertos patrones convencionales típicos, llamados controles Scherbius y Kramer, se representan en la Figura 1.26.

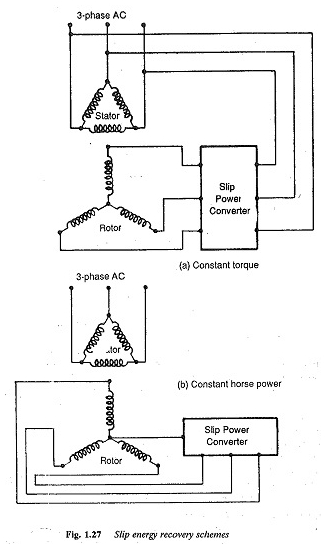
Cuando se utilizan estos métodos, el motor / NO debe funcionar para entrenar tanto el par constante como las cargas de potencia constantes. Estos se ilustran en la Figura 1.27 (a) y (b), en principio. En la figura.
1.27 (a) La potencia del rotor en la frecuencia deslizante se convierte en frecuencia de línea mediante un convertidor deslizante. Si el convertidor de potencia deslizante permite el flujo de potencia en ambas direcciones, el motor se puede usar tanto a velocidades sub y súper sincrónicas.
Este esquema se utiliza para causar cargas de par constantes. En la operación subsíncrona, la potencia deslizante se convierte en frecuencia de línea y se suministra al sector. En la operación supersíncrona, la potencia en la frecuencia de la línea se convierte en energía deslizante y se suministra al motor.
Una característica importante de esta modificación es que el par desarrollado es proporcional a la corriente del rotor bajo la hipótesis de un flujo constante en el motor. Las curvas de par de velocidad para este diagrama se representan en la Figura 1.28 (a).
La modificación deseada de las curvas de velocidad de par mostradas en la Figura 1.28 (a) se obtiene controlando el convertidor de potencia deslizante para corresponder al voltaje del motor a un cambio dado. El control del convertidor está representado por el parámetro A.
El aumento en un aumento en el voltaje en el lado del rotor del convertidor de potencia deslizante causa una caída de velocidad. En mayo se fijó para condiciones de vacío, fijadas en un valor vacío, el motor tiene la característica de la velocidad de caída.
Por ejemplo, A puede ser el ángulo de disparo del convertidor en el lado de la línea en el caso de los esquemas de potencia deslizante estática.
El diagrama ilustrado en la Figura 1.27 (b) utiliza la alimentación deslizante para conducir una máquina auxiliar. En este caso, el convertidor de potencia deslizante se combina con el rotor del motor de inducción y dibuja la potencia. Aquí también, las velocidades sub y súper sincrónicas son posibles.
En la operación subsíncrona, la máquina auxiliar convierte la potencia deslizante en potencia mecánica. En la operación supersíncrona, la potencia adicional se alimenta con devanados del rotor a través del convertidor deslizante de la máquina auxiliar. La conexión mantiene una potencia constante.
Las características de velocidad del torque del motor de inducción se representan en la Figura 1.28 (b). Aquí también, A es un parámetro del convertidor deslizante elegido para causar el control de velocidad como se describió anteriormente, cuando varía de una manera dada. La potencia deslizante es administrada por el eje del motor principal. El par disminuye con un aumento en la velocidad.
Con la disponibilidad de convertidores de potencia de tiristores, las cascadas del convertidor estático (inversor rectificador) se utilizan en los circuitos de rotor de motores de inducción para obtener las modificaciones mencionadas anteriormente a la característica de la velocidad del par. Los diagramas se representan en la Figura 1.29 (a).
La potencia deslizante se rectifica y se suministra al convertidor de línea común que alimenta la potencia hacia el sector. Las curvas de velocidad obtenidas por la variación en el ángulo del inversor de disparo se representan en la Figura 1.29 (6). También se puede usar un cicloconverteur en el circuito del rotor.
Inyección de tensión en el circuito del rotor:
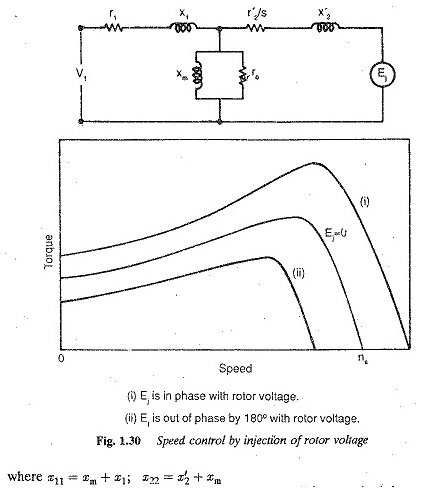
La característica del par de un motor de inducción se puede modificar inyectando un voltaje en el circuito del rotor (rotor de la herida) de un motor de inducción. La tensión inyectada debe estar a la frecuencia de deslizamiento.
Si la tensión inyectada se opone al voltaje del rotor, la corriente de rotor efectiva disminuye, lo que afecta instantáneamente el par. La pareja reducida no puede conducir la carga.
La velocidad del rotor disminuye a un valor que garantiza suficiente voltaje del rotor inducido y, por lo tanto, una corriente del rotor para causar la carga. Si, por otro lado, el voltaje inyectado ayuda al voltaje del rotor, conduce a un aumento en la corriente del rotor.
El aumento en el par desarrollado acelera el rotor a una velocidad a la que fluye una corriente del rotor suficiente para causar la carga. Las curvas de par de velocidad para ambos casos están representadas en la Figura 1.30.
A modo de comparación, también se indica la curva de velocidad de par de un rotor corto en circuito con voltaje inyectado cero. Según las cifras, se puede deducir que es posible modificar la capacidad de torque del motor modificando el voltaje inyectado.
Cuando la tensión inyectada se opone a la capacidad de torque de corriente del rotor, mientras que aumenta cuando la tensión inyectada facilita la tensión del rotor.
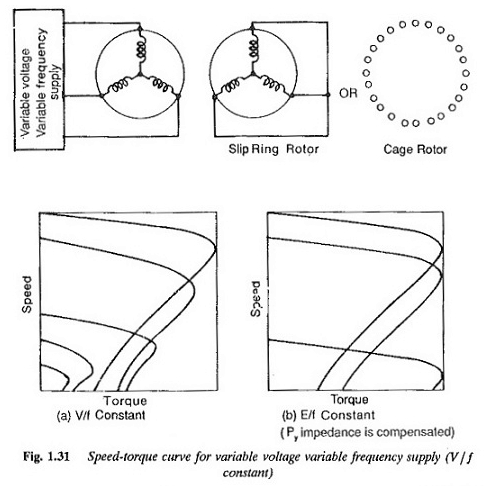
Variación en la frecuencia de potencia:
La velocidad de un campo magnético sincrónico depende de la frecuencia de potencia. En consecuencia, al variar la frecuencia de potencia, la velocidad sincrónica y, por lo tanto, la velocidad del rotor puede variar.
Para evitar la saturación debido a un aumento en el flujo de baja frecuencia, el voltaje aplicado al motor también varía para que el flujo permanezca constante en su valor nominal en todas las frecuencias.
Para lograr esto, un método simple es variar tanto la tensión como la frecuencia para que V / F sea constante. Las curvas de velocidad de par con constante V / F se representan en la Figura 1.31.
Hay un agotamiento de torque de baja frecuencia. El motor tiene capacidad de torque reducida y capacidad de sobrecarga. Esto se debe al efecto dominante de la resistencia del estator a bajas frecuencias.


La caída de la resistencia se vuelve apreciable en comparación con el voltaje aplicado. Esto causa agotamiento del flujo, cuya consistencia no se puede mantener a baja frecuencia. La pareja desarrollada con V / F constante es
Para tener la misma pareja y la misma capacidad de sobrecarga en todas las frecuencias, es necesario compensar la caída del estator (resistencia) para mantener constante E / F. V / F ya no es constante porque aumenta a medida que disminuye la frecuencia. La pareja desarrollada en este caso está dada por

O
L ‘2σ es la inductancia de las fugas del rotor.
Las curvas de velocidad de par para E / F constante se representan en la Figura 1.31 (b).
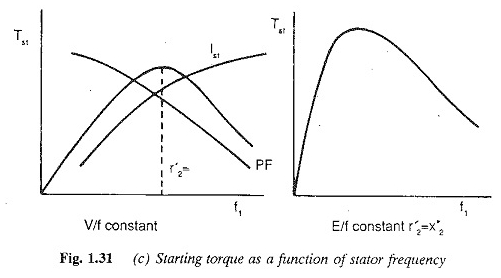
Con el control V / F (constante), el par inicial aumenta con una disminución en la frecuencia, hasta un cierto valor. Debajo de este valor de frecuencia, el par inicial disminuye. Este efecto se considera similar al realizado al modificar la reactancia de las fugas del rotor.
A medida que disminuye la frecuencia, la reactancia de las fugas del rotor. A medida que disminuye la frecuencia, la reactancia del rotor fugas disminuye. De hecho, tiene lugar un aumento en el rotor, la resistencia en comparación con la reactancia de las fugas.
En consecuencia, el par inicial aumenta hasta una cierta frecuencia, donde la reactancia de las fugas del rotor es igual a la resistencia al rotor.
Si la frecuencia se reduce, el par inicial disminuye. La variación del par inicial con la frecuencia se ilustra en la Figura 1.31 (c). Sin embargo, con el control E / F constante, el par inicial aumenta a medida que la frecuencia disminuye a un valor decidido por los parámetros.
Si la frecuencia aún disminuyó, el par inicial disminuye. La aceleración se puede obtener de un par constante y una corriente de refuerzo variando la frecuencia del estator de un valor bajo manteniendo E / F constante.
Las características de velocidad del par motor de inducción se obtienen aumentando la frecuencia de suministro más allá del valor nominal. El flujo del motor disminuye porque el voltaje no se puede aumentar más allá del valor nominal. El motor funciona en el flujo del flujo.
Las curvas de velocidad de par son paralelas entre sí en todas las frecuencias, se extienden al segundo cuadrante, lo que demuestra que la regeneración es posible.
El arranque del motor se puede lograr fácilmente utilizando un voltaje variable, una fuente de alimentación de frecuencia variable. Esto disminuye la corriente inicial, dando un par razonablemente acelerando bien a un buen factor de potencia incluso con motores de jaula con baja resistencia.
Control de velocidad del motor de inducción:
Un motor de inducción de tres fases es esencialmente un motor de velocidad constante. No es posible obtener un control de velocidad suave del motor en una amplia gama, cuando se proporciona a partir de un voltaje constante de tres fases convencional, de suministro de frecuencia constante.
Los convertidores de potencia de Thyristor han hecho posible la frecuencia variable y los suministros de voltaje variable. Estos se utilizan para obtener un control de velocidad suave de los motores de inducción en una amplia gama.
Los métodos para modificar las características de la velocidad del par del motor de inducción discutido son más o menos los métodos de control también. Los convertidores de potencia de tiristor se utilizan ampliamente para adoptar métodos de control de velocidad, por ejemplo
Un helicóptero para controlar la resistencia del rotor, el controlador de voltaje de CA para variar el voltaje de suministro, las cascadas del convertidor estático para la recuperación de energía deslizante, etc.