Características de cambio de torque del motor de inducción:
La expresión de las características deslizantes de par del motor de inducción (T (s)) se obtiene fácilmente al encontrar el equivalente de thevenin del circuito a la izquierda de AB en la Figura 9.12.
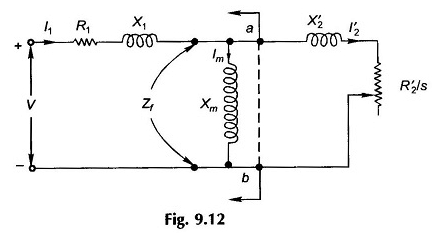
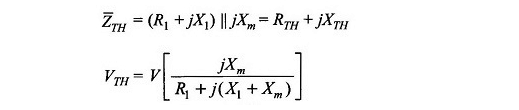
El circuito se reduce en la Figura 9.13 en la que es práctico tomar VTH como un voltaje de referencia.
En la Figura 9.13
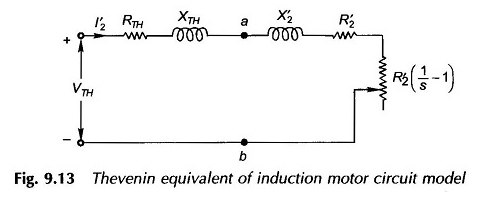

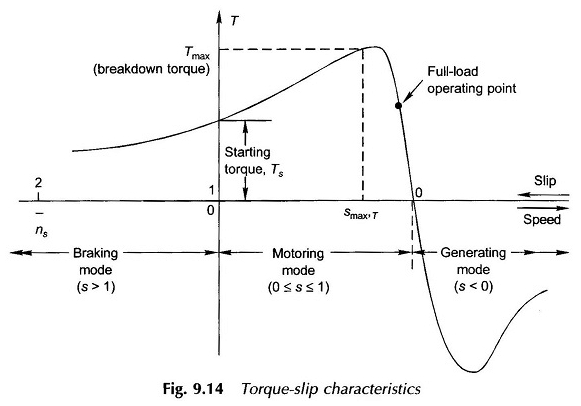
La ecuación (9.22) es la expresión del par desarrollado en función de la tensión y el cambio. Para un valor deslizante dado, el par es proporcional al cuadrado de tensión. Las características deslizantes de par del motor de inducción en el voltaje fijo (nominal) se rastrean en la Figura 9.14.
Las características de las características de deslizamiento de torque del motor de inducción se enumeran a continuación:
1. Modo Motorie: 0 ≤ s ≤ 1
Para este rango de deslizamiento, la resistencia de carga en el modelo de circuito de la Figura 9.13 es positiva, es decir que la potencia mecánica es la salida o el par desarrollado está en la dirección en que gira el rotor. También:
- La pareja es cero en s = 0, según lo dispuesto por el razonamiento cualitativo.
- El par tiene un valor máximo, llamado un par de falla (TBD) en Slip Smax, t. El motor se desaceleraría hasta que se cargue con más que el par de falla.
- En S = 1, es decir que cuando el rotor es estacionario, la pareja corresponde al par inicial, TS. En un motor normalmente diseñado, TS es mucho menor que la TBD.
- El punto de funcionamiento normal está ubicado muy por debajo de TBD. El deslizamiento de carga completa es generalmente 2.8%.
- Las características de deslizamiento de par de la inducción del motor de la prohibición de cargos en un poco más allá de la carga completa son casi lineales.
2. Modo de generación: S <0
El cambio negativo implica el rotor que funciona a una velocidad súper sincrónica (n> ns). La resistencia de la carga es negativa en el modelo de circuito de la Figura 9.13, lo que significa que la potencia mecánica debe colocarse en su lugar, mientras que la potencia eléctrica se extinguirá en los terminales de la máquina.
3. Modo de frenado: S> 1
El motor funciona en la dirección opuesta al campo rotativo (es decir, negativo), absorbiendo la potencia mecánica (acción de frenado) que se disipa en forma de fuego en el cobre del rotor.
Torque máximo (ventilación):
Mientras que el par máximo y el cambio en el que ocurre se puede obtener diferenciando la expresión de la ecuación. (9.22), la condición para el par máximo se puede obtener más fácilmente del teorema de transferencia de potencia máxima de la teoría de los circuitos.
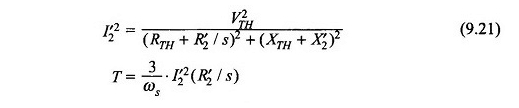
Como sabemos, el par es máximo cuando I’22 (R’2 / s) es máximo, es decir, la potencia máxima es absorbida por R’2 / s en la Figura 9.13. Esta condición se da como

Sustitución en la ecuación. (9.22) y simplificar

Se observa inmediatamente que el par máximo es independiente de la resistencia del rotor (R’2), mientras que el cambio en el que ocurre es directamente proporcional a él.
La característica deslizante de par de un motor de inducción con un anillo deslizante se puede modificar fácilmente agregando una resistencia externa como se muestra en la Figura 9.15a por cuatro de estas características con una resistencia progresiva creciente en el circuito del rotor. Podemos ver eso dependiendo de la ecuación.
(9.24), el par máximo permanece sin cambios según la ecuación. (9.23) El deslizamiento al máximo de torque aumenta proporcionalmente a medida que la resistencia se agrega al circuito del rotor.

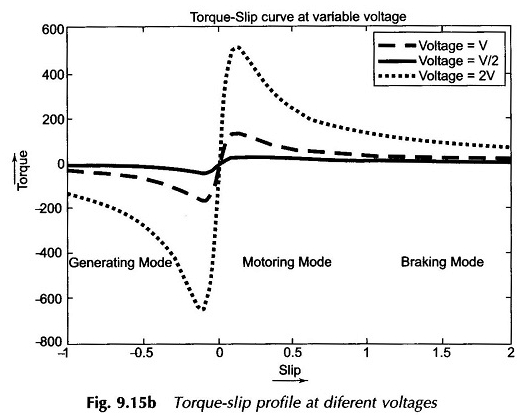
La Figura 9.15b indica el perfil TS con varios voltajes de alimentación. La velocidad también se puede controlar de esta manera modificando el voltaje del estator. Cabe señalar que el par se ha desarrollado en un motor de inducción proporcional al cuadrado del voltaje del terminal.
Pareja inicial:
Dejando s = 1 en la ecuación. (9.22)

El par inicial aumenta agregando resistencia al circuito del rotor. De la ecuación. (9.23) El par de arranque máximo se obtiene para (smax’t = 1)

Al mismo tiempo, la corriente inicial reducirá (ver Ec. (9.21)). Esta es, de hecho, la ventaja del motor de inducción del anillo deslizante en el que se obtiene un par de arranque alto a una corriente de arranque baja.
Una aproximación:
A veces, para tener una sensación (respuesta aproximada) de la característica operativa, es práctico suponer que la impedancia del estator es insignificante que conduce (ver Fig. 9.13)
![]()
En el circuito equivalente de thevenin en la Figura 9.13 de modo que vth = V. luego sigue las ecuaciones (9.21) a (9.26) que

El par de arranque máximo se obtiene en la condición
Algunas relaciones aproximadas de bajo cambio:
Alrededor de la velocidad nominal (carga completa), el deslizamiento del motor de inducción es tan pequeño que
![]()
para que X’2 pueda descuidarse por completo en un análisis simplificado. Ecuaciones (9.27) y (9.28) luego simplificar a
Se observa inmediatamente de la ecuación. (9.35) que las características deslizantes de par del motor de inducción son casi lineales en la región de baja cambio, lo que explica la forma lineal de la característica como se muestra en la Figura 9.14.
Salida de salida máxima:
Dado que la velocidad del motor de inducción se reduce con la carga, la potencia de salida mecánica máxima no corresponde a la velocidad (deslizamiento) a la que se desarrolla un par máximo. Para una potencia de salida mecánica máxima, la condición se obtiene de la Figura 9.13

La potencia máxima se puede encontrar correspondiente al cambio definido por la ecuación. (9.36). Sin embargo, esta condición corresponde a muy baja eficiencia y una corriente muy grande y está mucho más allá de la región de funcionamiento normal del motor.
Limitación de las características de cambio de torque del motor de inducción:
Los valores de los parámetros del modelo de circuito deben determinarse en condiciones que se acercan estrechamente a la condición de funcionamiento para la cual se debe utilizar el modelo.
Los parámetros del modelo de circuito válido para la condición de funcionamiento normal darían resultados erróneos cuando se usan para valores deslizantes anormales.
Al principio, el motor tira de la corriente nominal varias veces, lo que resulta en la saturación del núcleo y un aumento sustancial en el estator y la fuga del rotor reacciona. Además, la frecuencia del rotor es alta (idéntica al estator), los controladores del rotor tienen una mayor resistencia.
En consecuencia, los parámetros buenos para las condiciones de funcionamiento normales darían un resultado pesimista para la corriente inicial (mayor que el valor real) y el par inicial.