Características del motor de inducción de tres fases:
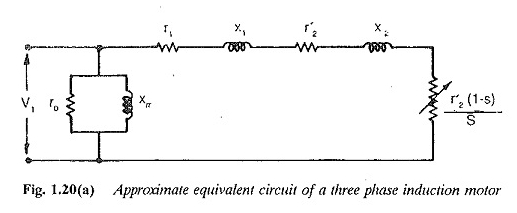
Las características de rendimiento del motor de inducción de tres fases se pueden derivar utilizando el circuito equivalente aproximado ilustrado en la Figura 1.20 (a). En el circuito

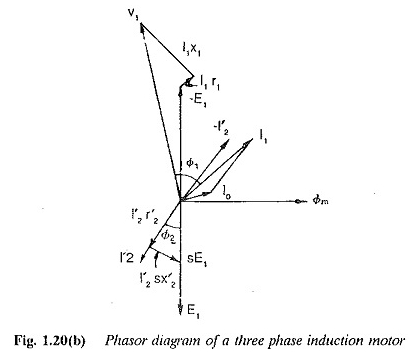
El diagrama de fase del motor se ilustra en la Figura 1.20 (b).
En un motor de inducción, la potencia transferida al rotor (PD), la pérdida de cobre del rotor (PCU2) y la potencia mecánica desarrollada (PM) están en una relación de 1: s: (1 – s). El par desarrollado por el motor

Pero usando relaciones pm = Pd (ls) y nr = ns (ls), tenemos
![]()
Más en uso 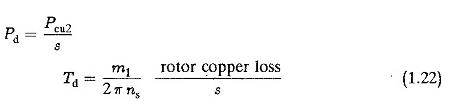
Del circuito equivalente

La pareja desarrollada es por lo tanto

Briefs muy pequeños (región de funcionamiento del motor)
y r′2 / s≫r1 que conduce a

Esto muestra que el par desarrollado es directamente proporcional al cambio. De la misma manera, con cambios significativos, la pareja varía en la proporción opuesta con el cambio. En los cambios intermedios, la pareja desarrollada debe calcularse. La característica del par de velocidad (deslizamiento) se representa en la Figura 1.21.
De la tendencia característica, podemos ver que hay un valor máximo para el par. El cambio en el que se realiza este torque máximo viene dado por

El par máximo es

A veces se descuida la impedancia del estator o la caída de la impedancia del estator se compensa para operar el motor a un flujo constante a todos los portaobjetos. El voltaje aplicado aumenta para que la tensión inducida. E1 / F es constante (igual al valor a voltaje nominal).
El voltaje aplicado varía según la frecuencia, como E1 / F, permanece constante. Se puede suponer que la impedancia del estator es cero porque no tiene ningún efecto. En tal caso, las relaciones son


“La curva de velocidad clave para este caso también está representada en la Figura 1.21.
Tenga en cuenta las siguientes características de una curva de velocidad de velocidad típica (Fig. 1.21):
- A la velocidad exactamente sincrónica S = 0, el par desarrollado es cero (TD = 0). Esto se puede esperar porque no hay corrientes inducidas debido a la velocidad relativa cero.
- La pareja de carga completa corresponde al cambio nominal.
- TDM es el par máximo en el deslizamiento SM (t)
- TST es el par inicial en S = 1.
La pareja desarrollada en cualquier deslizamiento expresado en la fracción de torque máximo está dada por

donde a = r1 / r′2. Cuando se descuida la resistencia del estator R1

El funcionamiento del motor en el rango deslizante 0 – SM es estable. Cuando el motor opera en esta playa, cualquier perturbación en el punto de operación cambiando la velocidad o el par se amortiza y el motor vuelve a su punto de operación original o alcanza uno nuevo. Para una operación estable, el par desarrollado debe aumentar cuando la velocidad cae, es decir,
La operación del motor en SM Beach. a / es inestable. En esta playa, la curva tiene un DTD / DNS positivo, es decir que el par disminuye cuando la velocidad cae.
La característica es casi lineal con diapositivas muy pequeñas (en la región de funcionamiento estable). Esta linealidad continúa hasta el punto de torque de ruptura para el caso de operación con un flujo constante. Las características ilustradas en la Figura 1.21 se rediseñan en la misma figura.
Para los cambios de la unidad, la operación está en el cuarto cuadrante. La rotación del rotor y el campo magnético rotativo están en una dirección opuesta. El par desarrollado es un par de frenado, que intenta detener el motor. Esto puede suceder de dos maneras:
- La secuencia de fase del suministro del motor se invierte durante su carrera.
- El par negativo se aplica al árbol.
El motor funciona como un freno en el rango de deslizamiento (s> 1) para que conduzca la carga a una velocidad constante mientras baja la carga. La pareja es positiva, mientras que la dirección de la rotación se invierte.
Por una resistencia apropiada del rotor, el punto de operación se mueve al cuadrante de operación para que la carga se reduzca a una velocidad constante.
La curva de velocidad de par se extiende al segundo cuadrante, representando un par negativo en la dirección antes de la rotación. Esto sucede si la velocidad de

El rotor es más alto que la velocidad sincrónica. Cualquier tendencia del rotor para acelerar más allá de la velocidad sincrónica es detenido por un par generado. En este modo de operación, toda la energía cinética conectada al aumento de la velocidad se devuelve al sector. El par máximo (descomposición) depende de lo siguiente:
- Varía como el cuadrado de la tensión aplicada.
- Disminuye con la impedancia del estator.
- Su valor es independiente de la resistencia del rotor.
- Su valor disminuye con un aumento en la reactancia de las fugas del rotor.