Construcción del motor de inducción de tres fases:
Un motor de inducción de tres fases que construye un convertidor tiene las siguientes ventajas en una línea nutrida en la línea:
1. La puesta en marcha de lavandería está garantizada por una frecuencia variable desde un fondo
2. Comenzar y acelerar la corriente y el par es posible.
3. La red ya no está sujeta a una corriente de sobretensión alta, como con el interruptor directo en la construcción de motores de inducción de tres fases de la jaula, y como tal, el equipo de inicio especial se puede omitir incluso a altas probabilidades.
4. Muchos momentos de inercia se pueden acelerar sin necesidad de la dimensión del motor.
5. El convertidor actúa como un dispositivo de desacoplamiento.
En consecuencia, la retroalimentación del motor en el punto de cortocircuito no se produce, cuando las líneas cortas de la línea, la clasificación de cortocircuito, en función de la cual el mayor número de servicios debe exagerarse, por lo tanto, es baja, lo que permite que se haga una economía.
Como ya se ha indicado, la velocidad de construcción del motor de inducción de tres fases se puede controlar proporcionando al estator un voltaje variable, una fuente de alimentación de frecuencia variable que utiliza convertidores de frecuencia estática.
El control de velocidad también es posible alimentando la potencia deslizante en el sistema de alimentación utilizando convertidores en el circuito del rotor. Básicamente, hay dos métodos de control de velocidad diferentes.
1. Control Control Control Entrenamiento de la liberación de aseo cuando el estator está alimentado por tensión constante, tuberías de frecuencia constante.
2. Control del motor de los tiempos utilizando un voltaje variable de frecuencia variable, operando el motor a una frecuencia constante del rotor.
El control de velocidad por variación en la frecuencia de deslizamiento se obtiene de la siguiente manera:
1. Control de voltaje del estado utilizando un controlador de tensión de tres fases.
2. Control de la resistencia del rotor usando una resistencia controlada por un helicóptero en el circuito del rotor.
3. Uso de una cascada convertidor en el circuito del rotor para recuperar la energía del cambio.
4. Usando un cicloconverteur en el circuito del rotor.
Control de un motor de inducción por variación de voltaje del estator (usando un controlador de voltaje de tres fases)
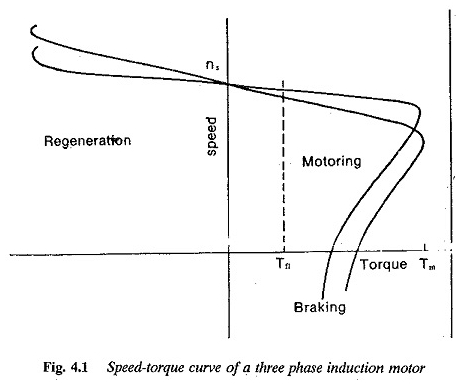
Es muy bien sabido que el par de una construcción de motores de inducción de tres fases varía directamente en proporción al cuadrado de la tensión. El par de un motor de inducción se da aproximadamente por

Y la curva de velocidad de par es como se muestra en la Figura 4.1. El deslizamiento para el par máximo está dado por 
que es independiente de la tensión del estator. Sin embargo, esto puede variar mediante la variación en la resistencia del rotor. El valor máximo de torque viene dado por

También cambia como el cuadrado de la tensión aplicada. Si la tensión se reduce al 80%, el par máximo cae al 64%. La variación en el voltaje aplicado se obtiene mediante un controlador de tensión.
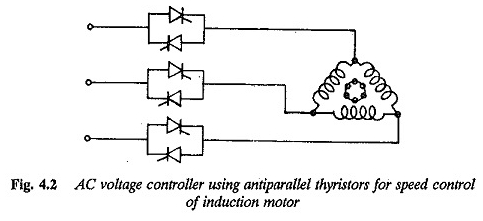
Este método para controlar la velocidad de un motor de inducción es simple y económico. El control de voltaje del estator se obtiene mediante el control de fase de los tiristores antiparalelos, conectados como se indica en la Figura 4.2.
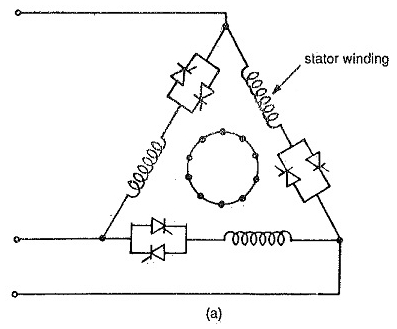
Las Figuras 4.3 (a) y (b) ilustran dos conexiones prácticas de un controlador de voltaje que suministra una construcción del motor con inducción de tres fases. En relación con la Figura 4.2, los tiristores solo deben administrar la corriente de fase. Las corrientes armónicas se vuelven más altas. En la Figura 4.3, la penalización armónica es bastante más.
El voltaje del estator puede variar de cero a valor completo en el rango de esquina de disparo. El factor de línea en el lado de la línea es muy mediocre debido a los armónicos y la potencia reactiva debido al control de fase.
Cuando un motor de inducción de la jaula se alimenta desde una fuente de alimentación de voltaje variable para el control de velocidad, se pueden hacer las siguientes observaciones:
1. La velocidad del par más allá del punto de par máximo tiene una forma negativa. Un punto de operación estable en esta región no es posible para una carga de par constante.
2. El controlador de voltaje debe poder soportar un alto arranque, el rango de control de velocidad es bastante limitado.
3. El factor de potencia del motor es pobre.
Para evitar las dificultades anteriores, la construcción del motor de inducción trifásico debe tener un rotor de alta resistencia. Esto hace que el cambio de torque máximo sea s = 1, reduciendo así la región inestable de la curva de velocidad de velocidad.
Debido al aumento de la resistencia al rotor, la corriente de arranque disminuye, el factor de potencia mejora y el rango de control de velocidad aumenta.
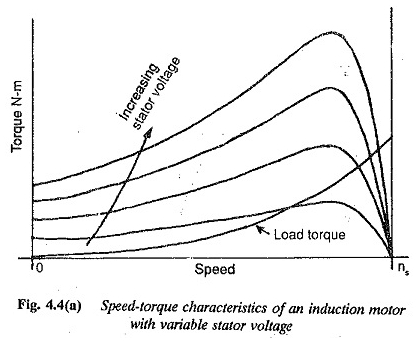
Por lo tanto, el método de control de velocidad es ventajoso con un rotor de alta resistencia. Las curvas de velocidad de par para este control se representan en la Figura 4.4 (a). La nota actual del controlador decide el posible par a cada velocidad.
La curva de límite de par dependiendo de la velocidad se puede derivar. La Figura 4.4 (b) muestra esta curva de torque de límite para la notación de diseño del controlador, que es tres veces la corriente nominal del motor. Se representa la corriente en función de la velocidad y el voltaje del estator.
Durante el control, si el valor actual excede el valor límite, se debe utilizar el límite de corriente automática. Con esto, el valor del ángulo de disparo se ajusta hasta que circula la corriente autorizada.
Incluso si el método es simple y económico, las pérdidas motoras aumentan con el aumento del cambio. El aumento de las pérdidas se puede atribuir al aumento de la corriente del motor debido a la caída en el flujo del espacio del aire, así como a la alta resistencia del rotor.
La relación R1 / R′2 puede considerarse representativa para decidir estas pérdidas porque el aumento de la resistencia es decisivo en la limitación de la corriente dibujada. La eficiencia del motor puede ser dada aproximadamente por
![]()
donde s es el deslizamiento del motor.
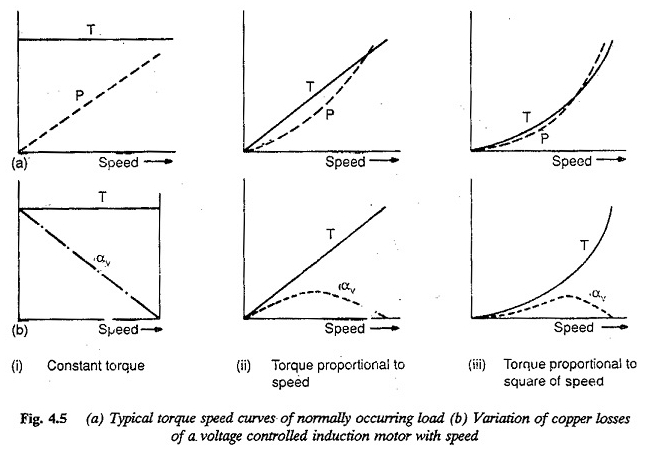
El tipo de carga impulsado por el motor influye en la corriente dibujada y las pérdidas del motor a medida que varía el cambio. Los cargos de realización normalmente son
1. Cargas de par cómodas
2. Variable de torque proporcional a la velocidad
3. Variable Totor proporcional al cuadrado de la velocidad

Considere que las características de la velocidad de carga de la carga están dadas por una ecuación general
![]()
Si el valor de x = 0, es equivalente a una carga de torque constante. X> 0 para cargas de torque variables (Fig. 4.5a).
Rotor Pérdidas de cobre
![]()
donde PD1 es la potencia del espacio de aire o la entrada de suministro del rotor.

Pero el deslizamiento del motor
y la entrada de potencia del rotor
![]()
El valor máximo de potencia transferido al rotor es
![]()
Pérdidas de cobre cuando se expresan como el informe PD1MAX que tenemos
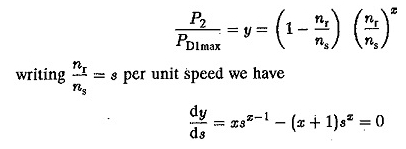
Para el valor de SAT que es máximo. El valor de

Para un valor máximo de la pérdida de cobre del rotor. Los valores máximos de las pérdidas de cobre del rotor están dados por

A medida que aumenta el valor de x, el valor de YM disminuye. También se puede determinar el valor máximo de la corriente del rotor y la velocidad unitaria a la que ocurre. Tenemos
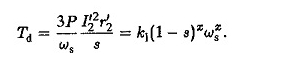
desde el cual la corriente del rotor
![]()
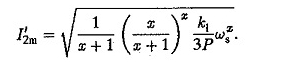
por velocidad unitaria para el valor máximo de la corriente del rotor también es
![]()
El valor máximo de la corriente del rotor se puede determinar como
Para casos especiales
La variación en las pérdidas se representa en la Figura 4.5 (b) para diferentes tipos de cargas. Las cargas de torque constantes no se favorecen debido al aumento de las pérdidas pésimas con el cambio y se convierten en máximo a S = 1.0.
Esto es obvio, a partir de la variación del flujo porque el voltaje varía para el control de la velocidad. Para mantener un par constante, el motor atrae una corriente pesada, lo que conduce a un poca torque / amperio, mala eficiencia y un factor de potencia malo a baja velocidad.
Cuando el par varía en proporción directa para acelerar, las pérdidas de cobre tienen un valor máximo de 25% de potencia nominal a una velocidad de 0.5 Ω.
Para las parejas proporcionales al cuadrado de la velocidad, la velocidad unitaria a la que las pérdidas de cobre son máximas es 2/3 y el valor máximo de las pérdidas de cobre es 0.149 de potencia nominal.
El método de control de velocidad se puede usar ventajosamente para cargas de bomba o ventilador donde el par es proporcional al cuadrado de la velocidad.
De la discusión anterior, este método de control de velocidad solo es adecuado para los siguientes casos:
1. Para operaciones a corto plazo donde se define la duración del control de velocidad.
2. Para controlar la velocidad de los sopladores o bombas con variaciones parabólicas o cúbicas en torque con velocidad. Esto no es adecuado para cargas de torque constantes debido a un aumento en las pérdidas y el calentamiento.
3. Para controlar la velocidad del motor con poca eficiencia en funcionamiento normal.
El tipo de carga (par dependiendo de la velocidad de la carga) en el motor de transmisión influye en las pérdidas en el motor. Las ondas de entrada no minusoidales causan corrientes no minusoidales que aumentan las pérdidas armónicas.
En consecuencia, las pérdidas totales aumentan en particular a bajas velocidades y estas pérdidas causan un posible estrechamiento del motor, o se debe utilizar un motor demasiado dimensional cuando se usa este método.
Para las cargas de tipo de soplado donde T α N2, el valor máximo de la corriente ocurre a una velocidad de 2/3 de la velocidad básica. Esta corriente depende de la carga completa del motor del motor. Para motores deslizantes grandes (rotores de alta resistencia), la corriente máxima a la corriente nominal está disminuyendo.
Para las cargas de torque constantes, las pérdidas de potencia aumentan con la reducción de la velocidad y alcanza el valor máximo a la velocidad cero en sí. Para las cargas con t α n, el máximo ocurre a 1/2, la velocidad y las pérdidas básicas ascienden al 25% de la potencia del estator.
Las pérdidas que ocurren en el motor son responsables del aumento de la temperatura del motor. Las pérdidas deben mantenerse en el valor autorizado para que el motor todavía funcione con un aumento de temperatura autorizado. Los diferentes tipos de cargos discutidos tienden a aumentar las pérdidas motoras.
Además, la forma de onda del voltaje de entrada está distorsionada. Las corrientes del estator y el rotor no son sinusoidales con un rico contenido armónico. Estos armónicos causan pérdidas adicionales. Se pueden considerar el 50% de las pérdidas nominales de cobre.
El aumento de las pérdidas del motor con grandes cambios conduce a un estrechamiento del motor. Se puede liberar un motor normal de 5 a 6 veces. Si se usa el rotor de alta resistencia, el factor aireado disminuye.
Las pérdidas totales del motor son

O
FV se encarga del aumento de las pérdidas debido a la distorsión y normalmente se considera 1.5.
PR es la calificación del motor
K1PR es el total de la pérdida de cobre del motor.
Para mantener el aumento en la temperatura autorizada, las pérdidas autorizadas son

O
η es la eficiencia del motor
El αV es la relación de las pérdidas a una velocidad mínima para notar pérdidas. velocidad.
Evaluación PTVP del motor.
El factor αV depende del tipo de carga utilizada. Para las máquinas enfriadas por la fuerza, es 1.0 e independiente de la velocidad. Si la máquina es auto-rehacer, depende de la velocidad. Este valor disminuye a medida que disminuye el límite inferior de la velocidad.
Una característica típica para una máquina con dos polos se representa en la Figura 4.5 (c). El estrechamiento también se ve afectado por la eficiencia del motor. A medida que la eficiencia disminuye 1-η / η aumenta. Para este tipo de motor de control de velocidad del rotor grande, se utilizan 17 resistencia. Tienen mala eficiencia. Por lo tanto, el estrechamiento del motor disminuye.

La discusión anterior indica claramente que un motor dado se distorsiona de manera diferente cuando causa diferentes tipos de cargas.
En otras palabras, la potencia requerida por la carga es constante, el motor de transmisión debe ser dimensiones diferentes para diferentes tipos de curvas de velocidad de carga de la carga, el ejemplo depende de lo ilustre.