Control de frecuencia variable de la unidad de motor de inducción:
Control de frecuencia variable de la unidad de inducción del motor – Velocidad sincrónica, por lo tanto, la velocidad del motor puede controlarse mediante una frecuencia de potencia variable. El voltaje inducido en el estator es proporcional al producto de la frecuencia de suministro y el flujo de la brecha de aire.
Si se descuida la caída del estator, el voltaje del terminal puede considerarse proporcional al producto de la frecuencia y el flujo.
Cualquier reducción en la frecuencia de suministro, sin cambios en el voltaje terminal, provoca un aumento en el flujo de la brecha de aire. Los motores de inducción están diseñados para operar en el punto de rodilla de la característica de la magnetización para usar completamente el material magnético.
Por lo tanto, el aumento en el flujo saturará el motor. Esto aumentará la corriente de magnetización, deformará la corriente y la tensión de la línea, aumentará la pérdida de núcleo y la pérdida de cobre del estator y producirá un ruido acústico en una chimenea alta.
Aunque un aumento en el flujo más allá del valor evaluado no es deseable a partir de la consideración de los efectos de saturación, también se evita una disminución en el flujo para mantener la capacidad de torque del motor.

En consecuencia, el control de la frecuencia variable de la unidad del motor de inducción por debajo de la frecuencia nominal generalmente se lleva a cabo en el flujo nominal de la brecha de aire mediante un voltaje terminal variable con la frecuencia para mantener la relación constante (v / f) al valor nominal. De la ecuación. (6.13)
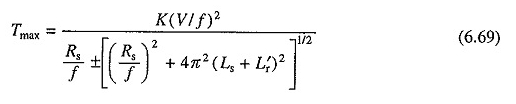
Donde K es una constante, y LS y L ‘son, respectivamente, el estator y el estator han referido las inductancias del rotor. El signo positivo se refiere al funcionamiento del automóvil y el signo negativo es para la operación de frenado.
Cuando la frecuencia no es baja, (RS / F) ≪ 2π (LS + L ′ R) y, por lo tanto, de (6.69)

La ecuación (6.70) sugiere que con una relación constante (V / F), el motor desarrolla un par máximo constante, excepto a baja velocidad (o frecuencias). Por lo tanto, el motor funciona en modo de par constante. Según la ecuación.
(6.69), para frecuencias bajas (o bajas velocidades) debido a la caída de resistencia del estator [es decir, cuándo (RS / F) no es insignificante en comparación con 2π (LS + L ′ R)] El par máximo tendrá un valor más bajo en el funcionamiento del motor (signo) y un mayor valor en el funcionamiento del brazo (signo).
Este comportamiento se debe a la reducción del flujo durante la operación del automóvil y el aumento del flujo durante el funcionamiento del frenado. Cuando es necesario que el mismo par máximo se mantenga a baja velocidad también en la operación del automóvil, la relación (v / f) aumenta a baja frecuencia.
Esto provoca un aumento adicional en el torque de frenado máximo y una saturación considerable de la máquina en el funcionamiento del frenado.
Cuando tiene o alcanza el valor nominal a la velocidad básica, no se puede aumentar con la frecuencia. Por lo tanto, por encima de la velocidad básica, la frecuencia se modifica con constante v. Según la ecuación. (6.70), con V mantenido constante, el par máximo disminuye con el aumento de la frecuencia (o velocidad).
Por lo tanto, la variación del voltaje terminal con la frecuencia es como se muestra en la Figura 6.33 (a). V se mantiene constante por encima de la velocidad básica. Debajo de la relación de velocidad básica (V / F) se mantiene constante, excepto a baja frecuencia donde la relación (v / f) aumenta para mantener el torque constante máximo.
Las curvas de torque correspondientes se representan en la Figura 6.33 (b) tanto para la manga como para las operaciones de frenado. Las curvas sugieren que el control de velocidad y la operación de frenado están disponibles a una velocidad de velocidad a la velocidad de velocidad sincrónica.

Se obtiene un par dado con una corriente más baja cuando la operación a cualquier frecuencia es limitada entre la velocidad sincrónica y el punto de torque máximo, tanto para operaciones automáticas como de frenado.
En consecuencia, la operación del motor para cada frecuencia es limitada entre la velocidad sincrónica y el punto de par máximo, como se muestra en las líneas completas de la Figura 6.33 (b).
El control de frecuencia variable de la unidad de motor de inducción ofrece un buen rendimiento operativo y transitorio debido a las siguientes características:
- El control de velocidad y la operación de frenado están disponibles desde la velocidad cero hasta la velocidad básica superior.
- Durante los transitorios (inicio, frenado y inversión de velocidad), la operación se puede llevar a cabo con un par máximo con una corriente reducida, lo que proporciona una buena respuesta dinámica.
- Las pérdidas de cobre son bajas, y la eficiencia y el factor de potencia son altos porque la operación es limitada entre la velocidad sincrónica y el punto máximo de torque en todas las frecuencias.
- La caída en la velocidad de la falta de carga completa es pequeña.
La ventaja más importante del control de frecuencia variable del motor de inducción es que permite una unidad variable con una buena función operativa y rendimiento de transición por encima de un motor de inducción de jaula de ardilla.
El motor de la jaula de la ardilla tiene una serie de ventajas en comparación con un motor de CC. Es económico, robusto, confiable y más duradero.
Debido a la ausencia de un interruptor y cepillos, no requiere prácticamente ningún mantenimiento, puede explotarse en un entorno explosivo y contaminado, y puede diseñarse para velocidades, tensiones y dimensiones de energía más altas. También tiene inercia, volumen y peso más bajos.
Aunque el costo de un motor de jaula de ardilla es mucho más bajo en comparación con el de un motor de corriente continuo de la misma nota, el costo general del entrenamiento del motor de inducción del motor, en general, es mayor.
Pero debido a las ventajas enumeradas anteriormente, los lectores de motor de inducción de frecuencia variable se prefieren a los discos del motor CC para la mayoría de las aplicaciones.
En aplicaciones especiales que requieren operación sin mantenimiento, como instalaciones subterráneas y submarinas, así como en aplicaciones que involucran entornos explosivos y contaminados, como en las minas y la industria química, los lectores de motor con inducción de frecuencia variable son una opción natural.
Tienen varias otras aplicaciones, como tracción, tablas de molinos, acero, bombas, ventiladores, sopladores, compresores, piscinas, transportistas, máquinas herramientas, etc.
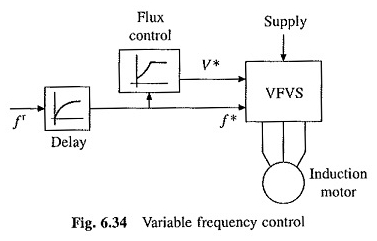
El diagrama de bloques del control de frecuencia variable del esquema de conducción del motor de inducción se ilustra en la Figura 6.34. El motor se suministra desde una fuente de voltaje variable de frecuencia variable (VFV). V * y F * son controles de voltaje y frecuencia para VFV.
El bloque de control de flujo produce un comando de voltaje V * para VFVS para mantener la relación de la Figura 6.33 (a) entre V * y F *. La frecuencia de referencia F * se modifica a la velocidad de control.
Se introduce un circuito de retraso entre F * y FR, de modo que incluso cuando FT se modifica por una gran cantidad, F * solo cambiará lentamente para que la velocidad del motor pueda seguir los cambios de FT, restringiendo así la operación del motor para cada frecuencia entre la velocidad sincrónica y el punto máximo de torque. Los VFV pueden ser un inversor de fuente de tensión o un cicloconverteur.
Control de velocidad de velocidad:
Sea V y F el voltaje y la frecuencia nominales de la máquina. Cuando el motor se usa por debajo de la velocidad básica con un control constante (V / F), para una frecuencia, KF, el voltaje terminal será KV, donde K es un factor como 0 ≤ K ≤ 1. Por lo tanto, porque la frecuencia ha aumentado de 0 a F, K pasar de 0 a 1 y que el voltaje cambia de 0 a V.
Sustituyendo la tensión de KV y la frecuencia de KF y descuidando la caída de resistencia del estator, las ecuaciones (6.4) y (6.10)
En ecuaciones. (6.71) y (6.72) if (ks) se mantiene constante porque K varía, entonces la corriente del rotor I’r y la pareja t permanecerán constante. Dado que el cambio es pequeño, el R estará en línea con el voltaje. Dado que el flujo es constante, IM también será constante. AHORA
![]()
Por lo tanto, si la operación del motor se lleva a cabo con un valor constante de Ks a medida que la frecuencia varía, el motor funcionará con una corriente constante y un par. Examinemos el significado de KS.
A la frecuencia de KF
Nota ωST es la velocidad deslizante, que es la diferencia en la velocidad de campo rotativo kΩms y la velocidad del rotor Ωm. También es la caída en la velocidad del motor de su carga sin carga, cuando la máquina está cargada.
La discusión anterior muestra. Que para cualquier valor de t, la caída de la velocidad del motor desde su velocidad de carga (kΩms) es la misma para todas las frecuencias. Por lo tanto, las características del par de la velocidad de la máquina para 0
El funcionamiento de la máquina a una velocidad de deslizamiento constante también implica operación a una frecuencia de rotor constante como se indica a continuación

donde FR y ωr son respectivamente la frecuencia del rotor en Hz y Rad / seg.
Para S> (XS + X′R), por lo tanto de las ecuaciones. (6.72) y (6.73)

Eqn. (6.76) sugiere que para S
Dependiendo de la discusión anterior, para una velocidad deslizante, la corriente del motor y el par tienen los mismos valores en todas las frecuencias. Por lo tanto, la corriente del motor y el par se pueden controlar controlando la velocidad de deslizamiento.
Además, la corriente del motor puede limitarse dentro de un límite de seguridad al limitar la velocidad de deslizamiento. Este comportamiento se usa en un control de velocidad de circuito cerrado para limitar la corriente dentro de un límite autorizado.
Luego consideremos la operación por encima de la velocidad básica. Como se indicó anteriormente, la máquina funciona a un voltaje constante V. ahora

Como la frecuencia es mayor que la nota k> 1. Dado que la operación está nuevamente limitada entre la velocidad sincrónica y el par máximo, el cambio tiene un valor pequeño, por lo tanto,

Por lo tanto, para las velocidades por encima de la velocidad básica, a un dado y, por lo tanto, aproximadamente a una donación, la velocidad de deslizamiento ωSL aumenta linealmente con k (o frecuencia). Este comportamiento se usa en un control de velocidad de bucle cerrado para limitar la corriente en el valor autorizado por encima de la velocidad básica.
Dado que el cambio es pequeño, el R está en línea con V. Si se descuida la pérdida de la máquina de la máquina, la potencia desarrollada está dada por
![]()
Por lo tanto, el PM es constante para un dado y, por lo tanto, para un IS. Por lo tanto, el lector funciona en modo de potencia constante.
Limitaciones de torque y potencia, y modos de operación:
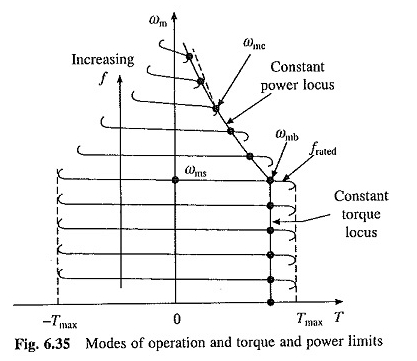
Las variaciones en el torque y la potencia para una corriente del estator dada y para las frecuencias a continuación y por encima de la frecuencia nominal están representadas por puntos en la Figura 6.35.
Cuando la corriente del estator tiene el valor máximo autorizado, estos representarán el par máximo y las capacidades de suministro del motor en el control de frecuencia variable de la unidad de inducción del motor.
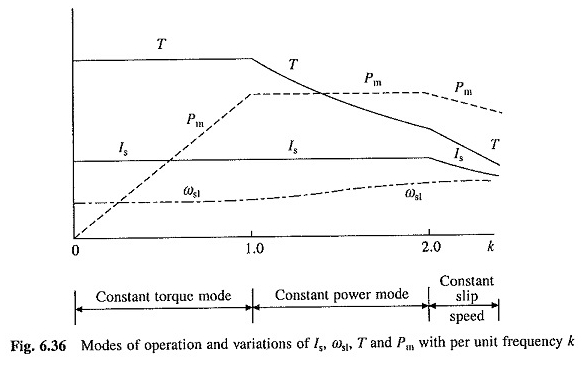
La variación en el par máximo y las capacidades de potencia con frecuencia se representa en la Figura 6.36. La variación en la velocidad de deslizamiento ωSL con la frecuencia también se representa en esta figura.
Como se muestra en la Fig. 6.35 y 6.36, el motor tiene un par máximo constante de cero a velocidad básica Ωmm, por lo que el lector funciona en modo de torque constante. En este rango de frecuencia, V se modifica con la frecuencia como se muestra en la Fig.
6.33 (a) y la velocidad de la corriente autorizada máxima permanece constante. Desde la velocidad básica hasta la velocidad ωmc, la potencia máxima tiene un valor constante, por lo que el motor funciona en modo de alimentación constante. A la velocidad ΩMC (Fig. 6.35), se alcanza el par de falla.
Cualquier intento de operar el motor en la corriente autorizada máxima más allá de esta velocidad sostendrá el motor. En consecuencia, más allá de la velocidad ωMC, la máquina funciona a una velocidad de deslizamiento constante y la corriente autorizada máxima y la potencia máxima puede disminuir (Fig. 6.36).
Ahora, la corriente del motor se reduce inversamente con la velocidad y el par disminuye inversamente a medida que la velocidad es cuadrada. La operación en esta región se requiere en los discos que requieren un amplio rango de velocidad, pero un par bajo a altas velocidades.
Por ejemplo, en las aplicaciones de tracción, el lector trabaja en esta región cuando funciona a toda velocidad porque el par requerido en el equilibrio de alta velocidad es muy bajo en comparación con su valor durante la aceleración.