Control del inversor de la fuente de voltaje del motor de inducción:
La frecuencia de la frecuencia variable y la fuente de alimentación de voltaje variable para el control del motor de inducción se puede obtener de un inversor de voltaje SID (VSI) o cicloconverador. El control del inversor de la fuente de voltaje del motor de inducción se describe aquí y la capacitación alimentada por los cicloconversores.
Vsi Induction Engine Drives:
El control de la fuente de la fuente de voltaje del motor de inducción permite obtener una fuente de alimentación de frecuencia variable de una fuente de alimentación de CC. La Figura 6.37 (a) muestra un VSI usando transistores. Cualquier otro dispositivo autodemótico se puede usar en lugar de un transistor.
En general, el MOSFET se usa en los inversores de bajo voltaje y de baja potencia, el IGET (transistor bipolar con la puerta aislada) y los transistores de potencia se utilizan hasta niveles promedio de potencia y el GTO (la puerta gira el tiristor) y el IGCT (tiristores en la puerta aislada) se utilizan para niveles de potencia altos.

El control del inversor de voltaje del motor de inducción se puede usar como inversor de onda estante o un ancho de pulso (PWM).
Cuando operan como un inversor de onda de propagación, los transistores se cambian a la secuencia de su número con una diferencia de tiempo T / 6 y cada transistor se mantiene durante la duración de T / 2, donde T es el período de tiempo para un ciclo. La onda de tensión de línea resultante se representa en la Fig.
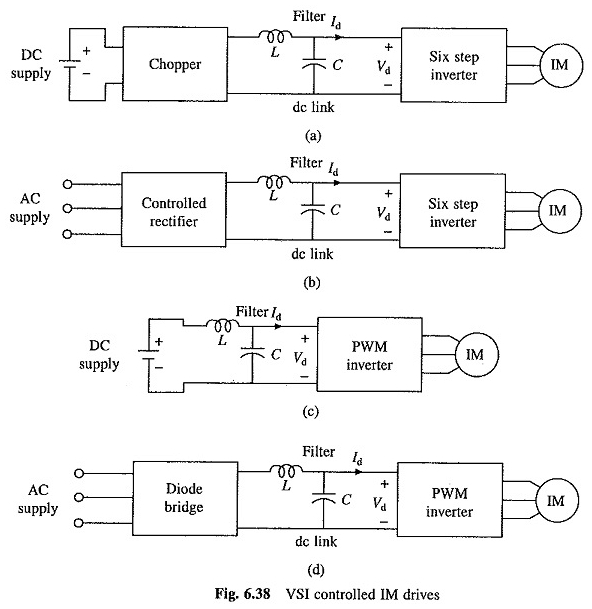
6.37 (b). La frecuencia de la operación del inversor varía variando t y el voltaje de salida del inversor varía variando el voltaje de entrada CC variable. Cuando la fuente de alimentación es DC, el voltaje de entrada CC variable se obtiene conectando un helicóptero entre la potencia continua y el inversor (Fig. 6.38 (a)).
Cuando la fuente de alimentación es CA, el voltaje de entrada CC variable se obtiene conectando un rectificador controlado entre la potencia de CA y el inversor (Fig. 6.38 (b)).
Un gran condensador de filtro electrolítico C está conectado en el enlace de CC para realizar el funcionamiento del rectificador o inversor helicóptero y para filtrar los armónicos en la tensión de conexión de CC.
La salida del inversor y las tensiones de fase están dadas por la siguiente serie de Fourier:


El valor de RMS de la tensión de fase fundamental

El par para una velocidad dada se puede calcular considerando solo el componente fundamental. El principal inconveniente del inversor de onda impermeable son los grandes armónicos de baja frecuencia en la tensión de salida.
En consecuencia, una unidad de motor de inducción desde un inversor de onda extendida sufre de las siguientes desventajas:
- Debido a los armónicos de baja frecuencia, las pérdidas del motor aumentan a todas las velocidades que causan el estrechamiento del motor.
- El motor desarrolla parejas pulsantes debido a la quinta, séptima, undécima y trece armónicas que causan un movimiento desigual del rotor a baja velocidad.
- El contenido armónico en la corriente del motor aumenta a baja velocidad. La máquina saturada con cargas de luz a baja velocidad debido a la alta relación (VLF). Estos dos efectos sobrecalentan la máquina de baja velocidad, lo que limita la velocidad más baja a alrededor del 40% de la velocidad básica.
Se reducen los armónicos, se eliminan los armónicos de baja frecuencia, las pérdidas asociadas se reducen y el movimiento suave se obtiene a baja velocidad también cuando el inversor se trabaja como un inversor modulado por el ancho del pulso. Higo.
6.37 (c) muestra la forma de onda de tensión de salida para la modulación sinusoidal del ancho del pulso.
Dado que el voltaje de salida ahora se puede controlar mediante la modulación del ancho del pulso, no se requiere ninguna disposición para la variación en el voltaje CC de entrada, el inversor puede conectarse directamente cuando la fuente de alimentación es DC [Fig. 6.38 (c)] y mediante un rectificador de diodo cuando la fuente de alimentación es AC. [Higo. 6.38 (d)].
El componente fundamental de la tensión de la fase de salida de un inversor PWM que funciona con PWM sinusoidal está dada por

¿Dónde está el índice de modulación?
Los armónicos de corriente del motor producen una pulsación de torque y requieren el motor. Para un contenido armónico dado en el control del terminal del motor, los armónicos actuales se reducen cuando el motor tiene una mayor inductancia de fuga, lo que reduce las pulsaciones de reducción y torque.
En consecuencia, cuando se usa del inversor del inversor de la fuente de voltaje del motor de inducción con inductancia significativa de fugas (en comparación con la fuente de alimentación en la fuente de alimentación sinusoidal).
Frenado y operación multiclenada de entrenamiento motor de inducción de motor:
La fuente de alimentación en el motor viene dada por
![]()
O
V = componente fundamental de la tensión de fase motora
Este = Componente fundamental de la corriente de fase motora
Φ = ángulo de fase entre V e IS.
En el funcionamiento del automóvil φ <90 °, el pin es positivo, es decir, los flujos de potencia del inversor a la máquina. Una reducción en la frecuencia hace que la velocidad sincrónica sea más baja que la velocidad del rotor y la velocidad relativa entre los controladores del rotor y el campo de aire rotativo.
Esto invierte el EMF induce por el rotor, la corriente del rotor y el componente de la corriente del estator que equilibra los giros del rotor del rotor. En consecuencia, el ángulo φ se vuelve superior a 90 ° y el flujo de potencia se invierte.
La máquina funciona como una fuente de alimentación del generador en el inversor, que a su vez alimenta la fuente de alimentación en CC invirtiendo la ID actual del enlace CC.
El frenado regenerativo se obtiene cuando la potencia que fluye desde el inversor al enlace CC se usa útilmente y el frenado dinámico se obtiene cuando se desperdicia en una resistencia.
Frenado dinámico:
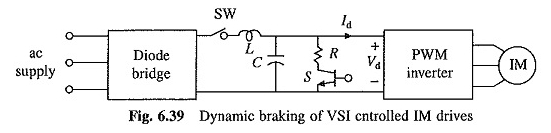
Primero consideremos el frenado dinámico del inversor modulado por el ancho del pulso de la Figura 6.38 (d). Con el frenado dinámico, el lector será como se muestra en la Figura 6.39.
Para el frenado dinámico, el interruptor SW y un interruptor automático (aquí transistor) en serie con una resistencia de frenado RB conectada al enlace CC se agregan al lector en la Figura 6.38 (d). Cuando la operación del motor fue de la carretera al interruptor de frenado, SW está abierto.
La energía generada que fluye en el enlace CC carga el condensador y sus tensiones aumentan. Cuando cruza un valor definido, el interruptor se ha cerrado, conectando la resistencia a través del enlace.
La potencia generada y parte de la energía almacenada en el condensador fluye hacia la resistencia, y el voltaje de enlace CC se redujo. Cuando cae a su valor nominal, está abierto.
Por lo tanto, al cerrar y abrir los interruptores en función del valor del voltaje de enlace CC, la energía generada se disipa en la resistencia, dando frenado dinámico. La operación de frenado dinámico de los discos de FIG. 6.38 (a) a (c) se puede obtener de manera similar.
Frenado regenerativo:
Primero consideremos el frenado regenerativo del entrenamiento ondulado modulado por el ancho del pulso (PWM) de la figura 6.38 (c) y (d). En el lector de la Fig. 6.38 (c), cuando la operación de la máquina va del automóvil al frenado, la identificación se invierte y fluye a la energía de alimentación de CC en la fuente.
Por lo tanto, el lector en la Figura 6.38 (c) ya tiene una capacidad de frenado regenerativa. En el caso de la capacitación en la Figura 6.38 (d), para el frenado regenerativo, la fuente de alimentación al enlace CC debe transferirse a la potencia de CA.
Cuando la operación va del automóvil a la ID de frenado se invierte, pero VD permanece en la misma dirección. Por lo tanto, para la capacidad de frenado regenerativo, es necesario un convertidor capaz de administrar el voltaje de corriente continua de una polaridad y una corriente CC de una u otra dirección.
Un convertidor doble tiene esta capacidad y se ha utilizado en el pasado. Los discos recientes usan el convertidor de enlace sincrónico (SLC) porque lleva una corriente sinusoidal al factor de potencia de la fuente de la fuente de CA, tanto durante las operaciones de conducción como de frenado.
Por lo tanto, aunque su rendimiento es mayor, requiere menos dispositivos que un doble convertidor. El principio de su operación se explica aquí.
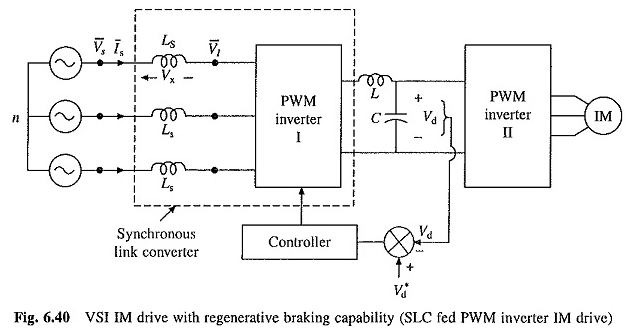
Un lector regenerativo con un inversor SLC y PWM se ilustra en la Figura 6.40. Los inductos de LS y PWM constituyen un SLC.
El inversor PWM se usa para producir un voltaje VI de la amplitud y la fase requerida y con un contenido armónico bajo, de modo que la corriente de origen es casi sinusoidal y en fase con VS para autorización y 180 ° excluyendo la fase para el frenado, lo que da un factor de potencia de la unidad.
Los diagramas de fase se representan en las Figs. 6.41 (a) y (b). Para cada uno es valor, se requiere V1 de la fase y magnitud dadas. Esto se puede hacer fácilmente en la modulación sinusoidal del ancho del pulso (PWM).
En la magnitud PWM sinusoidal y la fase de V1, depende de la amplitud y la fase de la señal de modulación [1]. En consecuencia, V1 de la fase y magnitud dada se puede producir produciendo una señal de modificación de la amplitud y la fase requerida.
Dado que VI es producido por el inversor PWM, no contiene armónicos de baja frecuencia. La inductancia LS filtra armónicos de alta frecuencia para producir una corriente de origen casi sinusoidal es. Los diagramas de fase en la Figura 6.41 son similares a los de una máquina sincrónica.
Por lo tanto, el comportamiento del convertidor de enlace sincrónico es similar al de una máquina sincrónica, por lo tanto, se llama convertidor de enlace sincrónico.

Cuando el lector en la Fig. 6.40 funciona en equilibrio, el suministro proporcionado (enchufe) por SLC debe ser igual a la electricidad tomada (suministrada) por el inversor PWM II. Dado que los dos funcionan independientemente entre sí, esto se lleva a cabo al proporcionar un control de bucle cerrado de la tensión de conexión CC.
Cuando el suministro proporcionado por SLC al enlace CC es igual a la potencia tomada por el inversor PWM II, no se suministrará o se tomará energía del condensador C y su voltaje será constante e igual al valor de referencia VD *.
Si ahora se incrementa la carga en IM, la potencia tomada por el inversor PWM II del enlace DC será mayor que la potencia proporcionada por el SLC. Por lo tanto, la tensión del condensador VD caerá por debajo de su valor de referencia VD *.
El control de voltaje de circuito cerrado aumentará el valor IS y, por lo tanto, la fuente de alimentación al enlace DC. En consecuencia, el voltaje del enlace CC se reducirá al valor de referencia.
Dado que SLC funciona como un convertidor de impulso, el control de circuito cerrado del voltaje de enlace CC ofrece al lector una capacidad de conducción contra una tensión y un flujo de tensión.
Cuando cae el voltaje de la fuente de CA, el control de voltaje de circuito cerrado mantiene el voltaje de unión CC constante al aumentar el IS y, por lo tanto, el motor continúa proporcionando un voltaje constante y, por lo tanto, produce la misma potencia y torque máximo.
El lector en la Figura 6.38 (b) puede tener una capacidad de frenado regenerativa al reemplazar el rectificador controlado por un convertidor doble. El SLC no se puede usar porque requiere un voltaje constante de unión a CC, mientras que el voltaje de enlace de CC con seis etapas debe variar.
El lector en la Figura 6.38 (a) tendrá una capacidad de frenado regenerativa si se utiliza un helicóptero de dos cuadrantes en la Figura 5.44 (capaz de proporcionar una tensión de una polaridad y corriente en ambas direcciones).
Operación de cuatro cuadrantes:
Se puede obtener cuatro operaciones del cuadrante con cualquier capacidad de frenado (regenerativa o dinámica). Una reducción en la frecuencia del inversor, para hacer que la velocidad sincrónica sea más baja que la velocidad del motor, transfiere el funcionamiento del cuadrante I (delantero del automóvil) a II (frenado delantero).
La frecuencia y la tensión del inversor se reducen gradualmente a medida que la velocidad cae para ralentizar la máquina a la velocidad cero.
Ahora, la secuencia de fase de la tensión de salida del inversor se invierte intercambiando los impulsos cansados entre los dos interruptores de legislidad del inversor, por ejemplo, entre los pares (TRL, TR4) y (TR3 y TR6) en la Figura 6.37 (a).
Esto transfiere la operación de cuadrante HI (motor inverso). La frecuencia y la tensión del inversor se incrementan para obtener la velocidad requerida en la dirección opuesta.