Control de la resistencia del rotor del motor de inducción:
Las curvas de velocidad de par para el control de la resistencia del rotor del motor de inducción se dan en la Figura 6.50. Mientras que el par máximo es independiente de la resistencia al rotor, la velocidad a la que se produce el par máximo cambia con resistencia al rotor. Para el mismo par, la velocidad cae con un aumento en el control de la resistencia al rotor del motor de inducción.

La ventaja de controlar la resistencia del rotor del motor de inducción es que la capacidad de torque del motor permanece sin cambios incluso a baja velocidad. Solo otro método que tiene esta ventaja es un control de frecuencia variable.
Sin embargo, el costo de controlar la resistencia del rotor del motor de inducción es muy bajo en comparación con el control de frecuencia variable.
Debido al bajo costo y la capacidad de torque elevada de alta velocidad, el control de la resistencia al rotor se usa en grullas, jugadores de Ward Leonard Ilgener y otras aplicaciones de carga intermitentes.
Un inconveniente importante es la baja eficiencia debido a pérdidas adicionales en la resistencia conectada en el circuito del rotor. A medida que las pérdidas tienen lugar principalmente en la resistencia externa, no escapan del motor.
Métodos convencionales:
Se utilizan varios métodos para obtener resistencia variable. En los controladores de tambor, la resistencia varía usando interruptores rotativos y resistencia dividida en unos pocos pasos. La resistencia variable también se puede obtener utilizando contactores en serie y resistencias.
Las aplicaciones de alta potencia utilizan un regulador deslizante, que consta de tres electrodos sumergidos en un electrolito, compuesto de agua salina. La resistencia varía modificando la distancia entre los electrodos y el electrodo terrenal.
Cuando la energía es alta, los electrodos son conducidos por un pequeño motor. La ventaja de este método es que la resistencia se puede cambiar sin paso.
Control de resistencia del rotor estático:
La resistencia al rotor también se puede variar sin paso usando el circuito en la Figura 6.51. El voltaje de salida del rotor del rotor se rectifica mediante un puente de diodo y se suministra con una combinación paralela de una resistencia fija R y un interruptor de semiconductor realizado por un transistor TR (Fig. 6.51).
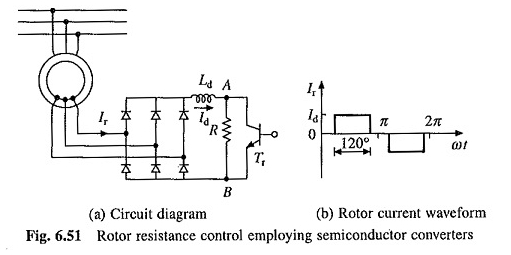
El valor efectivo de la resistencia entre los terminales A y B, Rab, varía mediante un informe de servicio variable del transistor TR, que a su vez varía la resistencia al circuito del rotor. Se agrega inductancia de LD para reducir la ondulación y la discontinuidad en el enlace CC actual.
Se indicará la forma de onda de la corriente del rotor. En la Figura 6.5104 cuando se descuida la ondulación. Por lo tanto, la corriente del rotor RMS será

La resistencia entre los terminales A y B es cero cuando el transistor está encendido y será R cuando se extingue. En consecuencia, el valor promedio de la resistencia entre las terminales está dada por
![]()
donde δ es el informe de servicio del transistor y está dado por la ecuación. (5.112).
El poder consumido por Rab es
![]()
Ecuaciones. (6.88) y (6.89), el poder consumido por Rab por fase es

La ecuación (6.90) sugiere que la resistencia al circuito del rotor por fase aumenta en 0.5R (1 – δ). Por lo tanto, la resistencia total del circuito del rotor por fase ahora será

La RRT se puede variar de RR a (RR + 0.5R) porque δ pasó de 1 a 0.
En la Figura 6.52 se ilustra un diagrama de control de velocidad de circuito cerrado con el bucle de control de corriente interna. Corriente de rotor IR y, por lo tanto, la ID tiene un valor constante en el punto de par máximo, tanto durante el motor como el enchufe.
Si se hace que el limitador actual se sature a esta corriente, el lector acelerará y desacelerará el par máximo, dando una respuesta de transición muy rápida. Para que ocurra el enchufe, la disposición debe tomarse para la inversión de la secuencia de fase.
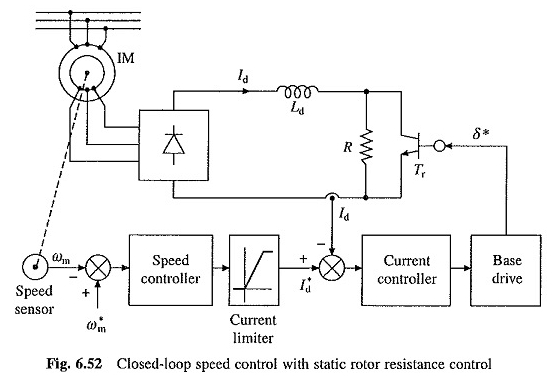
En comparación con el control de resistencia al rotor convencional del motor de inducción, el control de la resistencia al rotor estático tiene varias ventajas, como suave y sin paso, la respuesta rápida, menos mantenimiento, tamaño compacto, control simple de circuito cerrado y resistencia al rotor permanecen equilibrados entre las tres fases para todos los puntos de funcionamiento.