Control de velocidad del motor de inducción:
El control sin paso en la velocidad de los motores de inducción no se puede llevar a cabo de manera tan efectiva y a bajo costo como para los motores de CC. Se pueden ver varios métodos para controlar el motor de inducción considerando la ecuación de velocidad
![]()
Vemos en esta ecuación que hay dos métodos básicos de control de la velocidad del motor de inducción, a saber.
- Controlar el deslizamiento para una velocidad sincrónica fija y
- Control de velocidad sincrónica.
De

Hay dos formas de controlar la velocidad sincrónica: el control de la frecuencia de suministro y el control de los postes del estator. Este último método proporciona un control de pasos porque los polos se pueden modificar en varios de los dos. El cambio de publicación se lleva a cabo solo en un motor de jaula de ardilla y eso también para dos etapas.
Control de voltaje:
Es un método de control deslizante con un voltaje de frecuencia constante variable proporcionado al estator del motor. Obviamente, la tensión solo debe reducirse bajo el valor nominal.
Para un motor que funciona a un cambio de carga completa, si el cambio debe duplicar un par de carga constante, se deduce de las ecuaciones (9.34) y (9.35) que el voltaje debe reducirse en un factor de 1 / √2 y que la corriente correspondiente (i’2) aumenta a √2 del valor de carga completa.
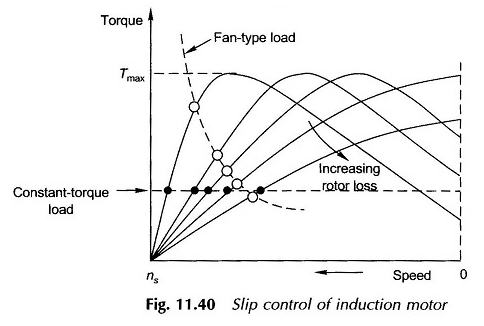
Por lo tanto, el motor tiende a sobrecalentarse. Por lo tanto, el método no es adecuado para el control de velocidad. Tiene un uso limitado para los motores que dan como resultado cargas de tipo de ventilador cuyas necesidades de par son proporcionales a la velocidad de la velocidad (ver Fig. 11.40).
Este es un método de uso común para ventiladores de techo entrenados por motores de inducción de una sola fase que tienen una gran impedancia de parada que limita la corriente dibujada por el estator.
Control de resistencia del rotor:
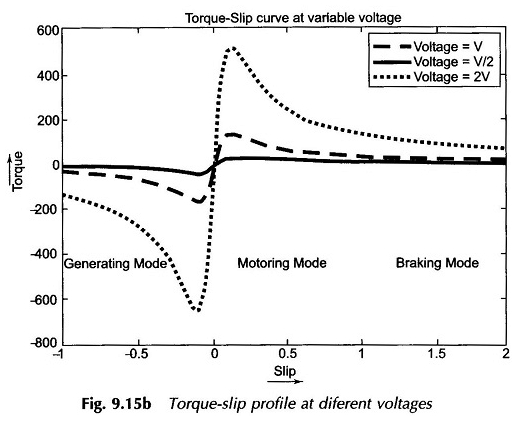
Como su nombre lo indica, este tipo de control de velocidad solo es posible para los motores de inducción de anillo. Se ve fácilmente refiriéndose a la Figura 9.15 que cuando aumenta la resistencia del rotor, el cambio de motor aumenta (cae de velocidad) para un par de carga fija.
La corriente del estator varía en un grado limitado porque el efecto de los cambios de la resistencia al deslizamiento y el rotor tiende a cancelarse (refiriéndose a la ecuación (9.34)) para valores deslizantes pequeños. Sin embargo, la potencia de entrada aumenta. Esto proporciona la potencia perdida en resistencia adicional al rotor.
La eficiencia del motor operativo, por supuesto, disminuye bruscamente. Por lo tanto, este método de control de velocidad como tal se adopta para un rango de velocidad estrecho y, en general, para una operación a corto plazo.

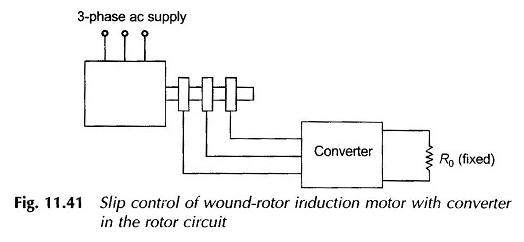
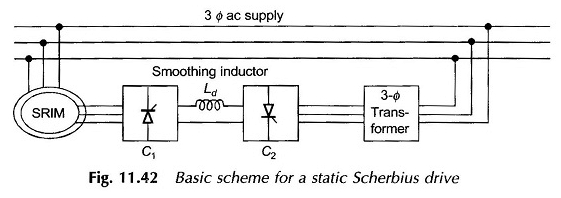
La efectividad de este tipo de diagrama de control de velocidad se puede mejorar devolviendo la potencia del rotor mecánicamente al árbol del rotor o eléctricamente al sector. El primer diagrama puede ser implementado mediante un rectificador y un motor de corriente continuo junto con el árbol del rotor.
El segundo diagrama requiere un convertidor de frecuencia que convierte la potencia de frecuencia variable en una frecuencia fija (fuente de alimentación) para reducir la potencia eléctrica al sector. Estos patrones pueden ser diseñados por los circuitos SCR (ver Figuras 11.41 y 11.42).
Es posible alcanzar velocidades supersincrónicas inyectando energía a la frecuencia apropiada en el rotor mediante una fuente de frecuencia ajustable.
Podemos ver que es todo lo contrario agregar una resistencia al rotor en el que se toma la potencia del rotor (y se desperdicia en una resistencia externa).
Una amplia gama de control de velocidad arriba y abajo es sincrónico es posible al incluir equipos de conversión de frecuencia en el circuito del rotor.
Control de frecuencia:
La velocidad de inducción sincrónica del motor se puede controlar en un paso sin un amplio rango modificando la frecuencia de suministro. Según la ecuación. (9.1) El hombre de aire que fluye como resultado por polo viene dado por


En consecuencia, para evitar la saturación de los núcleos del estator y el rotor, lo que causaría un alto aumento en la corriente de magnetización, el flujo φR debe mantenerse constante porque F se varía. Para lograr esto, se deduce de la ecuación.
(9.81) que cuando F está variado, V también debe variar de tal manera que (v / f) permanezca constante. La fuente de alimentación variable (V, F) de la potencia constante (V, F) puede organizarse mediante el diseño de la converter-converter ilustrada esquemáticamente en la Figura 9.49 (a) que usa circuitos SCR. La Figura 9.49 (b) muestra un esquema de control de velocidad alternativo que usa un convertidor y un motor de CC (derivación).

La atracción principal del uso del motor de inducción para el control de velocidad es su robustez, su bajo costo y su mantenimiento sin mantenimiento en comparación con el motor CC.
Debido al costo del inversor involucrado en el esquema de control de velocidad del motor de inducción, el diagrama continuo del motor de corriente es más económico.
Sin embargo, el esquema de motor de inducción es un candidato sólido para el control de velocidad y debería hacerse cargo en el futuro cercano con una mejora y reducción en la tecnología CCR adicional.