Control de velocidad del motor de inducción triphase:
El problema de controlar la velocidad del motor de inducción de tres fases en particular es de gran importancia práctica.
En varias industrias, los motores deben cumplir con requisitos característicos muy estrictos, tanto con respecto al rango como la dulzura del control y también con respecto al funcionamiento económico.
Desde el punto de vista desde la vista de la velocidad de las características del motor de inducción de tres fases, los motores de inducción son más bajos que los motores de CC.
La velocidad de un motor CC de derivación se puede ajustar entre una amplia gama con buena eficiencia y buena regulación de velocidad, pero en los motores de inducción, la velocidad no puede variar sin perder eficiencia y buena regulación de velocidad.
La velocidad de una inducción viene dada por la expresión

Por lo tanto, hay tres factores, a saber, la frecuencia de potencia F, el número de pleos P y la inclinación en las que depende la velocidad de un motor de inducción. Por lo tanto, para cambiar la velocidad de un motor de inducción, es esencial modificar al menos uno de los tres factores anteriores.
Los métodos de control de velocidad del motor de inducción de tres fases se distinguen dependiendo de la acción principal en el motor: (i) en el lado del estator, y (ii) en el lado del rotor.
Varios métodos para controlar la velocidad del motor de inducción de tres fases en el lado del estator son (a) la variación en la frecuencia de suministro (b) la variación del voltaje aplicado y (c) modificando el número de polos.
En el lado del rotor, la velocidad se puede controlar (a) modificando la resistencia en el circuito del rotor y (b) introduciendo en el circuito del rotor un EMF adicional de la misma frecuencia que la EMF fundamental del rotor.
Para este último método de control del motor de inducción de tres fases, son necesarias una máquina eléctrica adicional o más de estas máquinas.
Un conjunto compuesto por un motor de inducción regulado y una o más máquinas eléctricas adicionales que están conectadas a él de forma eléctrica o mecánica se llama cascada. Las máquinas de interruptor se usan comúnmente como máquinas adicionales.
1. Control de velocidad por variación en la frecuencia de suministro
Este método de control del motor de inducción de tres fases proporciona un amplio rango de control de velocidad con una variación progresiva en la velocidad en toda esta playa. La principal dificultad con este método es cómo obtener la dieta en frecuencia variable.
El equipo auxiliar requerido para este propósito conduce a un alto costo alto, un mayor mantenimiento y una caída en la eficiencia general. Es por eso que este método no se utiliza para aplicaciones de control de velocidad para uso general.
A pesar del hecho de que este diagrama es complicado, hay ciertas aplicaciones en las que su amplio rango de velocidad y su buena regulación de velocidad son muy deseables.
Si un motor de inducción debe funcionar a diferentes frecuencias con valores prácticamente constantes de eficiencia, factor de potencia, capacidad de sobrecarga y un cambio absoluto constante, entonces, con hierro insaturado, es esencial que el voltaje de suministro varíe en proporción a la frecuencia de la fuente de alimentación.
Este tipo de variación puede ocurrir, por ejemplo, si el generador de potencia está sujeto a variaciones de velocidad, ya sea debido a sobrecargas momentáneas o debido a una regulación de velocidad significativa. El voltaje y la frecuencia de salida varían tanto como una velocidad si no se proporciona corrección automática.
En cierta capacitación marina grande, los motores de la hélice son del tipo de inducción y se controlan a velocidad de una fuente de alimentación local que es suministrada por generadores síncronos junto con turbinas a velocidad variable.
Incluso en tales casos, el rango de variación de velocidad es limitada, porque la efectividad de los motores principales cae rápidamente con el cambio de velocidad en comparación con lo que están diseñados.
Las curvas de velocidad típicas para cuatro frecuencias diferentes se representan en la Figura 1.25.

2. Control de velocidad por variación en el voltaje de suministro
Es un método de control deslizante con un voltaje de suministro de frecuencia constante variable. En este método para controlar la velocidad de los motores de inducción, el voltaje aplicado al estator varía para variar la velocidad.
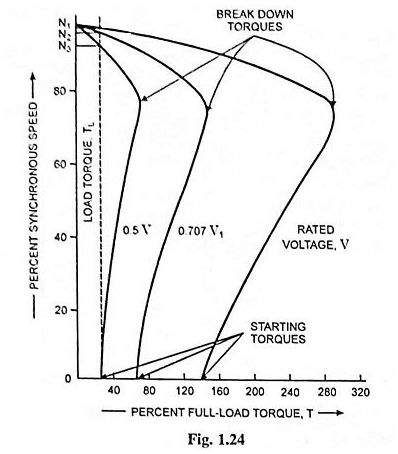
Este método de control de velocidad del motor de inducción trifásico es simple, bajo en el primer costo y tiene un largo costo de mantenimiento, tiene un uso limitado porque la operación a voltajes que excede el voltaje nominal está restringido por la saturación magnética, (ii) un gran cambio en el voltaje (iii) el par desarrollado se reduce en gran medida con la reducción de suministro y la potencia de suministro y el motor se detiene y se detiene el motor de carga y el torque de la potencia de la carga. (Iv) El rango de control de velocidad es muy limitado en la dirección hacia abajo, es decir, la velocidad nominal a las velocidades más bajas.
En general, este método de control del motor de inducción de tres fases se usa solo en las cargas donde el par requerido cae considerablemente a medida que la velocidad se reduce, como con los pequeños motores de jaulas de ardilla que lideran los ventiladores.
El voltaje variable se puede obtener mediante reactores saturados, variacos o transformadores con un cambio de cambio.
Las características de aceleración con voltajes reducidos se ilustran en la Figura 1.24.
3. Control de velocidad modificando el número de polos
Este método es fácilmente aplicable a los motores de la jaula de ardilla porque un devanado de la jaula reacciona automáticamente para crear el mismo número de polos que el estator.
Este método de control del motor de inducción de tres fases generalmente no es posible con los motores raíz de las heridas como en estas máquinas, este método implicaría complicaciones considerables de diseño y conmutación, porque las interconexiones de primaria y secundaria deben modificarse simultáneamente para producir el mismo número de polos en los dos vientos. De lo contrario, algunos de los cinturones del conductor del rotor serán desarrollados.
El número de pares de polos en el estator se puede modificar de la siguiente manera:
(a) Uso de varios devanados del estator: en este método de control del motor de inducción de tres fases, dos o más devanados independientes, cada lesión para un número diferente de polos, se colocan en las mismas máquinas tragamonedas. El número de postes de devanado del estator está en este
En ningún caso se vincula interdependentemente y no se puede elegir arbitrariamente de acuerdo con las condiciones de funcionamiento de este motor.
Por ejemplo, un motor de dos velocidades puede tener dos devanados del estator, una lesión para 4 postes y otro para 6 polos que darán velocidades sincrónicas de 1,500 rpm y 1000 rpm con una frecuencia de potencia de 50 Hz.
Los motores con cuatro devanados de estator independiente también se usan a veces y dan cuatro velocidades sincrónicas (y, por lo tanto, corren). Por supuesto, se usa un devanado al mismo tiempo, los otros son completamente ineficaces.
El cambio de una velocidad a otro puede ser realizado por un interruptor mecánico o por contactores. Con tal disposición, devanado o devanados que se usan / no se usan, debe mantener abierto por el interruptor, o al menos a la izquierda en una estrella.
De lo contrario, debido a la acción del transformador, el devanado que está conectado a los alimentos induciría tensiones en el devanado inactivo y causaría sobrecalentamiento debido a las siguientes corrientes circulantes.
La regulación en sí es equivalente a la modificación de la velocidad del motor en los pasos, porque uno u otro devanado del estator está conectado al sector eléctrico.
Con cada cambio, el motor está en condiciones esencialmente similares a las condiciones de partida, es decir, una corriente significativa y un par reducido. Debido a los controladores inactivos, este método de cambio de publicación requiere un estator grande que un motor a una sola velocidad de la misma nota.
Este método se utilizó para motores de ascensores, motores de tracción y también para motores pequeños para impulsar las máquinas herramientas.
(b) Método de polo sustancial: el método de cambio de polo para el control de la velocidad del motor de inducción trifásico descrito anteriormente en (a) es decir, el método de bobina del estator múltiple, se usa solo en motores pequeños.
En motores grandes, es más apropiado utilizar una técnica de polo sustancial que elimina la necesidad de tener varios devanados de estator para modificar el número de centros estatorios.
Este método de control del motor de inducción de tres fases utiliza todo el devanado para cada velocidad. Normalmente, para un solo motor de velocidad, los grupos de bobina sucesivos se enrollan para crear centros de polaridad sucesivamente opuestos. Esto se ilustra en la Figura 1.83, donde se desarrolla una fase de un devanado de cuatro posiciones.
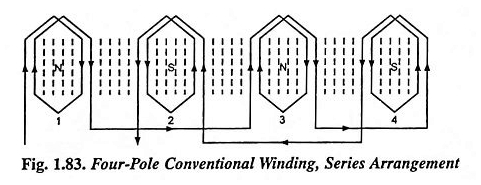
Cabe señalar que todas las bobinas están en serie, pero que las conexiones finales se establecen a grupos alternativos, es decir, Grupo 1 en el Grupo 3 y el Grupo 4 en el Grupo 2.
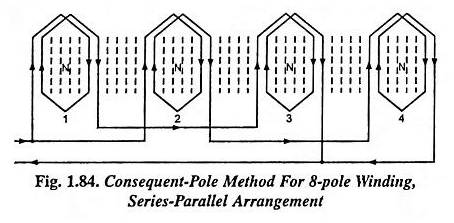
Ahora, las conexiones finales de los grupos, con las mismas bobinas, pueden modificarse para tener bobinas sucesivas de la misma polaridad, como se ilustra en la Figura 1.84.
Paralelamente a las conexiones de la serie de los Grupos 2-4 con estos grupos 1-3, la polaridad de los grupos 2 y 4 ha cambiado, por lo que ahora hay cuatro postes del norte sucesivos.
Como resultado de estos polos del sur, se crean entre cada uno de los polos del norte, y el motor ahora tiene un devanado de 8 polas.
Por lo tanto, para una fuente de alimentación de 50 Hz, la disposición de la serie proporciona una velocidad sincrónica de 1.500 rpm, mientras que la disposición de la serie Parral ofrece una velocidad sincrónica de 750 rpm.
También es posible utilizar una disposición paralela en serie para devanado de 4 posiciones, luego moverse a la serie para devanarse de 8 polos. En la Figura 1.85 se ilustra un circuito para cambiar un devanado de tres fases del devanado de 2 a 4 postes.
Al reconectar todos los grupos de bobinas para la misma polaridad, el estator actúa como si tuviera el doble de polos que los grupos de polos. Los postes adicionales así creados se denominan polos sustanciales, y el devanado se conoce como un devanado posterior consecutivo.
Mediante una sola disposición de conmutación, es posible tener la conexión estándar (o convencional) en un lado de un doble interruptor de lanzamiento y la conexión del poste sustancial en el otro lado del interruptor.
Por lo tanto, se pueden obtener dos velocidades, mayor velocidad con conexión convencional y medias impresiones con una conexión sustancial por polo.

En los motores que usan la técnica de polo sustancial para el control de la velocidad, el mejor diseño posible generalmente no se obtiene a ambas velocidades.
En otras palabras, las características deseables, como el factor de alta potencia, se sacrifican a una velocidad para que se obtenga un factor de potencia razonablemente bueno a la otra velocidad.
A veces, las conexiones del estator han ido del delta a la estrella al mismo tiempo que se modifican las conexiones posteriores. Esto cambia el voltaje y hace posible un mejor motor a cada velocidad.
Los motores de dos velocidades generalmente se fabrican con un devanado en el estator, el número de polos que se modifican en la relación 1: 2. Los motores de tres y cuatro velocidades están provistos de dos devanados en las estadísticas, uno o ambos se fabrican modificando el número de postes.
Por ejemplo, si se desea obtener un motor para cuatro velocidades sincrónicas; 1500, 1,000, 750 y 500 rpm, se deben colocar dos devanados en el estator, uno de los cuales dando 4 y 8 postes y el otro dando 6 y 12 postes.
Utilizando una conexión paralela en una serie de grupos de fase individuales, las fases pueden conectarse en la estrella / delta, lo que conduce a una operación de dos velocidades con los tres tipos de características de velocidad de torque, a saber, torque constante, potencia constante y torque variable.
Debido a complicaciones en el diseño y conmutación del devanado del estator, no es posible obtener más de cuatro velocidades para cualquier motor gracias a este método de control de velocidad. Este método tampoco proporciona control de velocidad progresivo.
Es por eso que este método no se utiliza para aplicaciones de control de velocidad para uso general.
Sin embargo, este método es muy satisfactorio para las aplicaciones, como ventiladores de ventilación, transportadores, máquinas herramientas u otras aplicaciones que requieren solo dos o cuatro operaciones aproximadamente constantes que proporcionará.
Este método tiene la ventaja de la simplicidad, la buena regulación de la velocidad para cada ajuste, alta eficiencia y costo y mantenimiento iniciales moderados.
El número de pares de polos en el estator también se puede modificar utilizando la técnica de modulación de amplitud de los polos, una técnica de modulación de los titulares de los pórticos eliminados.
Este método de cambio de publicación tiene la ventaja de que la relación de las dos velocidades disponibles no debe ser necesariamente 2: 1 como en el método de polo sustancial.
4. Control de impedancia del estator
Se puede obtener un voltaje reducido en los terminales de la máquina insertando resistencia equilibrada o inductancias en serie con cada cable del estator. En tales condiciones, el voltaje del terminal del motor depende de la corriente del motor y el voltaje cambia con la aceleración del motor. Las características del par a velocidad típica se ilustran en la Figura 1.86.
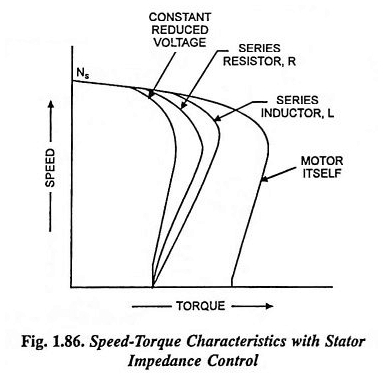
Si la impedancia (r o x) se ajusta para proporcionar el mismo par inicial, la característica de la velocidad del pollo en caso de una adición de inductancia tendría un par más grande que con resistencia adicional.
Además, estas dos características nos permiten tener parejas más grandes que las obtenidas con la característica con un voltaje aplicado reducido, para el mismo par inicial.
La inserción de la resistencia en el circuito del estator mejora el factor de potencia, pero al precio de mayores pérdidas de energía.
5. Control de velocidad por variación en la resistencia del rotor (o control de resistencia al rotor)
Los motores raíz de las heridas generalmente se lanzan mediante la conexión de las resistencias iniciales en el circuito secundario, que se cortan en las etapas a medida que el motor se acelera.
Si los valores óhmicos de estas resistencias se eligen adecuadamente y si estas resistencias están diseñadas para una operación continua, se pueden usar para un objetivo doble, para comenzar y controlar la velocidad. También es obvio, este método se puede aplicar a los motores de rotor enrollado solo.
La suavidad del control de velocidad depende de la cantidad de etapas de las resistencias disponibles. El control se proporciona en la dirección a la velocidad básica. El rango de control de velocidad no es constante y depende del valor de la carga.
Este método de control de velocidad tiene características similares a las de la velocidad del motor de derivación DC mediante resistencia en serie con el marco. Sus principales inconvenientes son la menor eficiencia y la mala regulación de la velocidad debido al aumento de la resistencia del rotor a la configuración de baja velocidad.
Por ejemplo, al 50% de la velocidad sincrónica, la efectividad del rotor es solo del 50% y la eficiencia del motor sería un poco menor. La variación de velocidad se limita a un rango de 50 a 100% solamente.
Se prefieren los reostatos líquidos a los reostatos metálicos porque no tienen inductancia y las resistencias se pueden cortar suavemente dando un par uniforme.
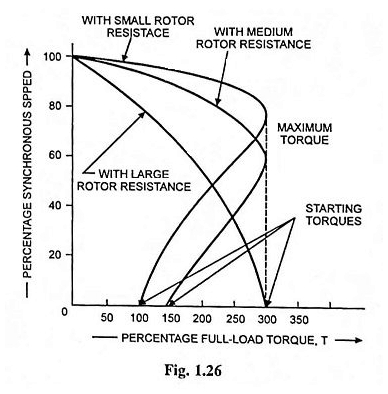
La introducción de resistencias externas en el circuito del rotor de un motor de inducción con anillo deslizante modificará las características de la parcela de velocidad como se ilustra en la Figura 1.26.
Por lo tanto, este método de control del motor de inducción de tres fases como tal no es adecuado para controlar la velocidad a un par constante.
Pero este método se usa ampliamente para las cargas donde la pareja requerida cae considerablemente a medida que se reduce la velocidad, como las cargas del ventilador para las cuales la entrada de alimentación cae significativamente cuando la velocidad se reduce, lo que a su vez reduce las pérdidas de cobre del rotor.
Además, este método no se adopta para el control de la velocidad continua, sino que se prefiere para la operación intermitente (corto tiempo). Tal método de control de velocidad se usa ampliamente en la práctica, para motores de baja potencia y en grúas aéreas.
Sin embargo, a veces se usa para la regulación de la velocidad de los rodillos, en particular donde se suministran con volantes para reducir los picos de carga en el circuito.
Aquí, el reóstato, llamado control de crucero, se enciende automáticamente cuando la carga aumenta y, por lo tanto, la velocidad disminuye y parte de la carga se compensa en detrimento de la energía cinética del volante.
Por el contrario, cuando la carga disminuye, se reduce la resistencia al circuito del rotor; La velocidad aumenta y el volante comienza a almacenar energía cinética.
6. Control secundario de tensión extranjera
En este método, la velocidad de un motor de inducción se controla inyectando un voltaje de frecuencia deslizante en el circuito secundario.
Si el voltaje inyectado está en línea con el EMF induce en el circuito secundario, es equivalente a una disminución de la resistencia en el circuito secundario, por lo tanto, el cambio disminuye o la velocidad aumenta.
Es posible alcanzar velocidades súper sincrónicas inyectando una tensión de frecuencia deslizante en la fase con el CMF inducido en el circuito del rotor.
Si el voltaje inyectado está en la fase de oposición a la EMF induce en el circuito secundario, es equivalente a aumentar la resistencia en el circuito secundario, lo que resulta en un aumento en el deslizamiento o una reducción en la velocidad.
Por lo tanto, este método es posible un amplio rango de control de velocidad al incluir equipos de conversión de frecuencia en el circuito del rotor.
En este método, se superan las desventajas de la menor eficiencia y la mala regulación de velocidad, pero requiere una y generalmente más máquinas auxiliares para inyectar un EMF de frecuencia deslizante en el circuito secundario, por lo tanto, es más caro y se usa con motores de notas muy grandes, como para los motores en los aceros.
Se han desarrollado varios métodos para controlar la velocidad de los motores de inducción inyectando una tensión de frecuencia deslizante en el circuito secundario.
Los diferentes métodos varían en sus requisitos para el equipo auxiliar; Desde la incorporación del equipo auxiliar en el diseño del motor de inducción hasta un sistema bastante complicado de máquinas rotativas auxiliares y transformadores de relación ajustable.
El criterio básico que debe llenar dicho sistema es: (i) que la tensión extraña variable tiene una frecuencia deslizante, es decir, una frecuencia igual a SF y (ii) que la energía asociada con la tensión extraña es recuperable.
Los sistemas más comunes basados en este principio son el sistema Kramer, el sistema LeBlanc y el sistema de control de velocidad Scherbius de los motores de inducción de polifásicos.
7. Control de velocidad por concatenación
En este método, son necesarios dos motores, de los cuales al menos uno debe tener un rotor de heridas. Los dos motores pueden acoplarse mecánicamente para causar una carga común.
Si el devanado del estator de uno de ellos, un motor de rotor de la herida, está conectado a la fuente de alimentación de CA de tres fases, y su devanado del rotor está conectado al devanado del segundo estator del motor, la velocidad de la combinación se determinará por la suma o la diferencia en la cantidad de polos en las dos máquinas.
En la práctica, es habitual conectar la salida del rotor de la primera máquina al estator desde la segunda máquina de tal manera que los campos de giro de los dos están en la misma dirección; En esta condición, la velocidad resultante estará determinada por la siguiente expresión.

O
- F es la frecuencia de los alimentos,
- P1 y P2 son el número de postes en las máquinas I y II, respectivamente.
Para obtener una velocidad, por encima de lo normal, el par del segundo motor se invierte simplemente modificando dos de las roscas del segundo motor. Esto se llama la cascada diferencial y bajo esta condición será dada por la expresión.

Se puede obtener un control de velocidad adicional, si lo desea, también se puede obtener una segunda máquina de tipo de máquina e insertando resistencia de control en el circuito del rotor de la segunda máquina.

Si los dos motores tienen el mismo número de polos y están conectados en cascada acumulada [Eq. (1.77)], operarán casi la mitad. Dado que el par del árbol se reduce en gran medida en la cascada diferencial, no se usa en la práctica.
La salida mecánica de las dos máquinas está aproximadamente en el informe de

o P1: P2, es decir en la relación del número de polos en las máquinas.