Control de velocidad en el circuito cerrado del entrenamiento del motor de inducción:
Un control de velocidad de bucle cerrado del entrenamiento del motor de inducción se ilustra en la Figura 6.43. Utiliza un bucle de velocidad interno con un limitador deslizante y un bucle de velocidad externo. Dado que para una corriente determinada, la velocidad deslizante tiene un valor fijo, el bucle de velocidad deslizante también funciona como un bucle de corriente interna.
Además, también garantiza que la operación del motor siempre ocurra por parte de la curva de velocidad de velocidad entre la velocidad sincrónica y la velocidad máxima de torque para todas las frecuencias, lo que garantiza una alta relación de torque / corriente.
El lector usa un inversor PWM nutrido de una fuente de CC, que tiene capacidades de frenado y operación regenerativos con cuatro cuadrantes. Sin embargo, el esquema de unidad es aplicable a cualquier VSI o reproductor de cicloconverter con capacidad de frenado regenerativa o dinámica. La operación del lector se explica a continuación.
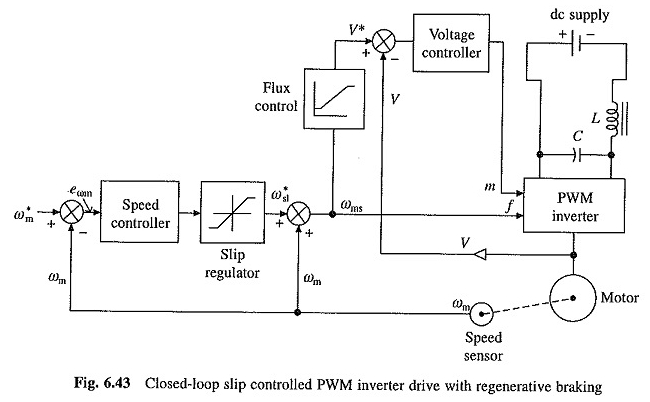
El error de velocidad se procesa a través de un controlador PI y un regulador deslizante. El controlador PI se usa para obtener una buena precisión en el estado de equilibrio y aliviar el ruido.
El regulador deslizante define el control de velocidad deslizante ω * sl, cuyo valor máximo se limita a limitar la corriente del inversor a un valor autorizado. La velocidad sincrónica, obtenida agregando la velocidad real Ωm y la velocidad de deslizamiento ω * sl, determina la frecuencia del inversor.
La señal de referencia para el control de velocidad de circuito cerrado del motor de inducción del voltaje del terminal de la máquina V * se genera a partir de la frecuencia F utilizando un generador de funciones.
Casi garantiza una operación de flujo constante a la velocidad básica y la operación a un voltaje terminal constante por encima de la velocidad básica.
Un aumento en los pasos del control de velocidad ω * m produce un error de velocidad positivo. El control de velocidad de deslizamiento ω * SL se define al valor máximo.
El lector acelera la corriente máxima del inversor autorizado, produciendo el par máximo disponible, hasta que el error de velocidad se reduce a un valor pequeño. El lector finalmente se deforma a una velocidad deslizante para la cual el par motor equilibra el par de carga.
Una disminución en el control de velocidad produce un error de velocidad negativa. El comando de velocidad de deslizamiento se define al valor negativo máximo.
El lector está roto bajo frenado regenerativo, corriente autorizada máxima y el máximo par de frenado disponible, hasta que el error de velocidad se reduzca a un valor pequeño.
Ahora, la operación se mueve a la automovilización y el lector se ajusta a la velocidad deslizante para la cual el par motor es igual al par de carga.
El lector tiene una respuesta rápida porque el error de velocidad se corrige para el par máximo disponible. El control de deslizamiento directo garantiza un funcionamiento estable en todas las condiciones de funcionamiento.
Para el funcionamiento más allá de la velocidad básica, el límite de velocidad deslizante del regulador deslizante debe aumentarse linealmente con la frecuencia hasta alcanzar el valor de distribución.
Esto se lleva a cabo agregando a la salida del regulador deslizante una señal de velocidad de deslizamiento adicional, proporcional a la frecuencia y de un signo apropiado.
Para las frecuencias por encima de la frecuencia para la cual se alcanza el par de falla, el límite de velocidad de deslizamiento se mantiene fijado cerca del valor de descomposición.
Cuando es necesaria una respuesta rápida, se puede permitir que el deslizamiento máximo sea igual al de SIN, ya que los motores de inducción pueden autorizarse para transportar la corriente nominal varias veces durante las operaciones de transición a corto plazo.
El inversor y su convertidor delantero se construyen utilizando dispositivos semiconductores cuyas dimensiones de dieta de transición y permanente son las mismas. Luego, las notas del inversor y el convertidor frontal deben elegirse varias veces la corriente del motor.
Esto aumentará considerablemente el costo de la variación. Cuando no se requiere una respuesta de transición rápida, las corrientes del inversor y el convertidor delantero pueden elegirse para que sean ligeramente más altos que las del motor.