Control vectorial de motores
Control del vector del motor de inducción:
La única idea detrás del control vectorial del motor de inducción es tener un lector eléctrico que debe ofrecer un mayor rendimiento que el motor CC excitado por separado se use ampliamente en la industria.
Además, dicho lector también debe surgir como una alternativa robusta y confiable, sin mantenimiento y más barato del reproductor CC. Hace unos años, el motor DC excitado por separado se consideraba un caballo de batalla principal en la industria.
Esto se debe a su rendimiento dinámico más rápido en comparación con el motor de inducción. La respuesta dinámica más rápida del motor CC se encuentra en su motor doblemente nutrido con una instalación inherente a un par y control de flujo en el motor.
Antes de la introducción del control vectorial del motor de inducción, los métodos que disfrutaron de una amplia aceptabilidad para controlar la conducción del motor de inducción de la jaula se denominan control de voltaje, control de frecuencia, control de resistencia del rotor, control V / F, control de flujo, control deslizante, control de recuperación de la potencia deslizante, etc.
Todos estos métodos de control están calificados como un control escalar de un motor de inducción y con estos, el motor de la jaula tiene un rendimiento dinámico más bajo en comparación con el motor excitado por separado.
En sus esfuerzos por tener un lector de CA sin mantenimiento, robusto y de alto rendimiento, el investigador quería lograr el rendimiento y mejorar las características del motor CC por separado con un motor de inducción con un rotor de jaula.
En este sentido, Blaschke introdujo el concepto de control vectorial del motor de inducción. Blaschke, en 1972, introdujo el principio de orientación en el suelo para llevar a cabo las características del motor DC en una unidad de motor de inducción.
Para lo mismo, utilizó el control desacoplado del par y el flujo en el motor y dio su nombre como control del transvector.
El lector de motores de inducción de la jaula con control o control orientado al campo ofrece un alto nivel de rendimiento dinámico y control de circuito cerrado asociado con este lector ofrece la estabilidad a largo plazo del sistema.
Aunque no hay una gran diferencia entre los controles escalares y vectoriales, este último tiene ciertas propiedades que lo hacen favorable como un sistema de control con un alto rendimiento dinámico.
El control del vector también se llama control independiente o desacoplado en el que se verifican los vectores de torque y corriente de flujo.
Es un hecho bien establecido que en el modo de control vectorial, el lector de motores de jaula está linealizado y que se comporta como un motor de corriente continuo completamente compensado, en el que el control de la corriente de refuerzo afecta directamente el par electromagnético desarrollado por el lector.
Del mismo modo, en el motor de la jaula, el método de control de vectores, las dos corrientes de cuadratura responsables de la producción y torque del flujo, respectivamente, están controladas de forma independiente y la respuesta del componente del productor de torque actual es muy rápido, proporcionando así un control de torque más rápido y, por lo tanto, el lector tiene un alto nivel de rendimiento dinámico.
En un sentido amplio, el control del motor de inducción de la jaula a medida que se comporta como un motor de corriente continuo completamente compensado se conoce como su vector.
En este caso, las corrientes del estator se expresan en referencia a un marco de coordenadas que se ejecuta en sincronismo con el vector MMF del estator o rotor.
Las corrientes del estator expresadas en estas coordenadas se resuelven en dos componentes ortogonales que producen el flujo y el par en el motor. Estos son similares al motor de corriente continuo en el que el par y el flujo se controlan controlando independientemente los marcos de refuerzo y campo.
Para controlar el par y el flujo (por lo tanto, la velocidad) independientemente en el motor de inducción, es necesario controlar la amplitud y la fase de las tres corrientes del estator (IAS, IBS, ICS) a través de un inversor rápido.
Para este fin, se utiliza normalmente un CC-TVSI (inversor de fuente de voltaje de corriente). Tal algoritmo de control estaría muy involucrado.
El uso está hecho de transformación de tres a dos fases (una operación de matriz bien conocida). Las dos corrientes de fase, el IDS y el IQS en cuadratura de fase requieren el control de las dos amplitudes y una fase que es lo que se lleva a cabo por el control del vector.
El control del vector del método del motor de inducción es la forma del diagrama de bloques en la Figura 11.63 Algunas etapas cruciales son las siguientes.
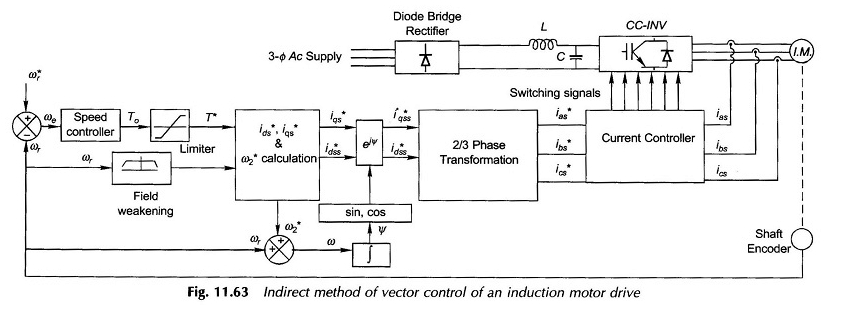
Desde la señal de velocidad del motor (ωr) y la velocidad deseada (Ω * r), se determina el error ωe. El controlador de velocidad calcula el par del motor (a) necesario para corregir la velocidad que atraviesa un limitador para determinar la señal de torque t *.
En un bloque de campo paralelo, un bloque de debilitamiento, la velocidad del motor ωr genera otra señal.
Estas dos señales se utilizan para calcular el i * ds e i * QS (corrientes de cuadratura ideales) y una corrección de velocidad ω * 2.
Ω = ωr + ω * r está integrado que luego se usa para encontrar la transformación eJψ. Esta transformación llevada a cabo en (i * ds, i * qs) da el último conjunto ideal (i * dss, i * qss).
La transformación de fase 2/3 en (i * dss, i * qss) da la corriente del estator ideal (i * as, i * bs, i * cs).
Las corrientes del estator medidas (IAS, IBS, ICS) se comparan con (i * as, i * bs, i * cs) por el controlador actual y las seis señales generadas controlan las corrientes alimentadas por el motor de inducción.
Lo anterior es una explicación simplificada del algoritmo de control del vector para el control del motor de inducción.
En el control del vector del motor de inducción, el flujo del rotor está regulado controlando la corriente de devanado del estator. Para regular el flujo del rotor, también se desea el conocimiento de su posición. La posición del flujo del rotor se detecta o estime.
En consecuencia, de acuerdo con las metodologías adoptadas para evaluar la posición del vector de flujo del rotor, el control del vector se denomina control de vector directo o control de vector indirecto.