Control orientado a la parte del motor de inducción de tres fases:
La corriente del estator de un motor de inducción tiene las funciones de producción del flujo de espacio de aire requerido (magnetización), así como para desarrollar el par requerido para causar la carga.
Un control controlado del motor de inducción de tres fases tendrá su funcionamiento similar al de un motor de corriente continua si los componentes de corriente del estator (a saber, la producción de flujo y la producción de torque) se pueden controlar por separado.
Este tipo de control es posible en un motor CC excitado por separado donde el par y el flujo se pueden controlar por separado e independientemente variando el refuerzo y la corriente de campo respectivamente.
Existiría un desacoplamiento inherente entre ellos, pero para los efectos de la reacción del refuerzo. Estos efectos pueden ser eliminados por compensación por refuerzo. Se puede obtener un desacoplamiento perfecto en un motor CC excitado por separado.
Este control versátil ofrece un comportamiento dinámico muy bueno a un motor de corriente continua. Por lo tanto, se obtiene una unidad de alto rendimiento que utiliza un control de motor de inducción de tres fases tratando de desacoplar los componentes de corriente del estator.
Este principio se llama control de la orientación del campo o control del vector. Este control mejora el comportamiento dinámico y se puede obtener un muy buen entrenamiento de rendimiento incluso a baja velocidad.
Los dos componentes de la corriente se identifican y se orientan correctamente en las órdenes ortogonales en comparación con el vector de flujo.
Los componentes de corriente pueden orientarse en relación con uno de los tres flujos, a saber, el flujo del estator, el flujo de espacio de aire o el flujo del rotor.
El análisis muestra que el rendimiento dinámico del lector no está en el nivel deseado si la orientación se lleva a cabo en comparación con el estator o el flujo de espacio de aire. Este mal comportamiento dinámico proviene del retraso de la pareja siguiendo el turno.
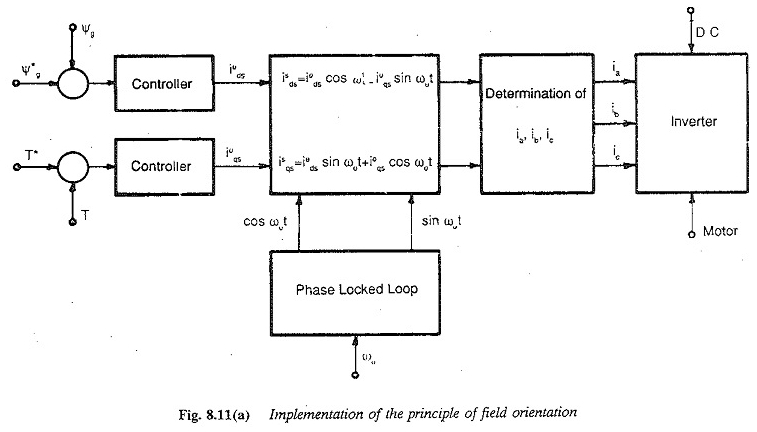
Es posible un desacoplamiento natural y efectivo si la orientación se lleva a cabo en comparación con el flujo del rotor, esto conduce a un control de torque de alto rendimiento de la conducción con una respuesta muy rápida. La implementación del principio de orientación en el terreno se ilustra en la Figura 8.11.
 Cuando se sugirió el principio de orientación de campo, no recibió la atención de la industria y no fue muy popular debido a equipos complicados. Con los desarrollos en componentes digitales y microprocesadores a través de LSI, y la miniaturización de los componentes, este control de alto rendimiento del control del motor de inducción de tres fases se vuelve popular. Un campo principal de aplicación y el uso efectivo de microprocesadores de alta velocidad es el control vectorial del control controlado en el motor de inducción de tres fases. Este control requiere
Cuando se sugirió el principio de orientación de campo, no recibió la atención de la industria y no fue muy popular debido a equipos complicados. Con los desarrollos en componentes digitales y microprocesadores a través de LSI, y la miniaturización de los componentes, este control de alto rendimiento del control del motor de inducción de tres fases se vuelve popular. Un campo principal de aplicación y el uso efectivo de microprocesadores de alta velocidad es el control vectorial del control controlado en el motor de inducción de tres fases. Este control requiere
- Información exacta sobre el flujo del rotor.
- El ajuste preciso de los componentes de corriente del estator en función de la referencia.
Las funciones de un microprocesador en el control vectorial del motor de inducción son las siguientes:
- Tratamiento de señales obtenidas del codificador de árbol para determinar la velocidad del rotor y también el ángulo del rotor. Este ángulo del rotor debe usarse en transformaciones de un cuadro a otro.
- La estimación de flujo utilizando voltajes terminales, corrientes y velocidad, dependiendo de uno de los modelos de la máquina.
- Cálculos con respecto a la fase y coordina las transformaciones para identificar los dos componentes de la corriente. Después del control necesario, estos componentes deben transformarse para proporcionar los valores de referencia para comparar con corrientes de fase real.
- Velocidad y bucles actuales en control de retroalimentación. La implementación de controladores en estos bucles.
- Para producir señales de cuadrícula para el convertidor del lado de la máquina y el lado de la línea, el convertidor del lado de la máquina decide la frecuencia mientras que el lado de la línea decide la corriente / voltaje. Las señales de disparo al convertidor de línea lateral se obtienen de la misma manera que se describe para un convertidor doble. Las señales de disparo al convertidor del lado de la máquina deciden la frecuencia. La velocidad del control orientada en el campo del motor de inducción de tres fases se agrega a la salida del controlador deslizante para decidir la frecuencia de la salida del inversor. La adición debe ser precisa porque se agrega una gran cantidad a una pequeña. La adición digital a un microprocesador es precisa. Por lo tanto, el microprocesador debe poder proporcionar o generar señales de disparo al convertidor lateral de la máquina.
- Adquisición de datos El microprocesador debe adquirir señales de retroalimentación en forma digital. Se requiere una transferencia de datos al procesador. Se requiere un flujo de datos desde el procesador y el procesador.
- Limitar las funciones lineales de las variables de control utilizadas en el comportamiento de control, así como el comportamiento no lineal del convertidor durante la conducción discontinua. Compensación por ganancia variable durante modos discontinuos de conducción y debilitamiento del campo.
Las operaciones matemáticas incluyen multiplicación, división, adición y resta. La unidad de procesamiento aritmético del microprocesador debe poder llevar a cabo estas operaciones.
La estimación de flujo se puede llevar a cabo mediante integración digital utilizando la regla de Simpson bien conocida o la regla trapezoidal. Pero los resultados sufren una pérdida de precisión debido a errores de truncamiento en procesadores de ocho bits. Estos errores conducen a la inestabilidad de las operaciones.
Use I de comando flotante con doble precisión mejora el rendimiento del procesador. Sin embargo, esto requiere un largo período de cálculo. Para reducir la carga del microprocesador, la estimación de flujo puede ser llevada por modelos analógicos externos al procesador.
El flujo calculado puede tratarse en el procesador. Los valores de referencia de las corrientes y flujos son desarrollados por el procesador.
Dependiendo de la velocidad del procesador y su capacidad para cumplir con las funciones anteriores, se puede establecer un borde entre el equipo local y el microprocesador, para cumplir las funciones.
A veces, el control del procesador múltiple se puede llevar a cabo dependiendo de la velocidad y la calidad del control requerido.
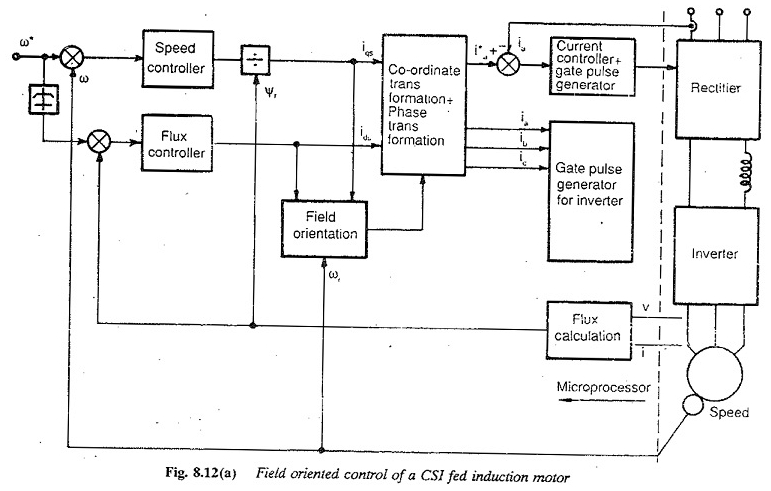
La orientación en el suelo es posible con el inversor de fuente de voltaje, así como el control de la fuente de corriente de la fuente de corriente suministrada por el campo del motor de inducción de tres fases. El inversor de origen actual se usa ampliamente debido a la simplicidad de su circuito de potencia.
Aquí se discuten las características del control orientado al control con CSI (8.12 (a)). A veces, un inversor PWM se puede controlar adecuadamente para proporcionar corrientes de referencia (Fig. 8.12 (b)). Este control se puede lograr utilizando un microprocesador.

El flujo se puede medir directamente utilizando bobinas de investigación o sondas en la sala. Las señales analógicas se convierten en digitales para nutrir en el microprocesador para el tratamiento posterior.
Esta medida directa, incluso si teóricamente exacta, tiene las siguientes limitaciones o dificultades: la presencia de sondas de habitación o bobinas de búsqueda sensibles hace que el motor de inducción sea más sensible, pero su robustez inherente se pierde.
La señal medida se superpone por los armónicos de hendidura que requieren filtrado. Ayuda a la medición y los errores de conversión hacen que los resultados no sean muy confiables. Por lo tanto, normalmente, se utiliza el cálculo de FLWC utilizando modelos de máquina (estimación indirecta).
Estos modelos de máquinas para calcular el flujo usan el control orientado en el suelo de los parámetros del motor de inducción de tres fases determinados a partir de pruebas de rotor sin carga y bloqueados. Inexactitud; Entre los modelos en la estimación de los parámetros, ¡la variación de la máquina!
Los parámetros debidos a la temperatura y la saturación deben tenerse en cuenta exactamente en la estimación. La precisión se altera en caso de integración involucrada en la estimación. Esto sucede si el voltaje y la velocidad se usan en el cálculo.
A poca velocidad, la integración introduce errores considerables en estos errores y se puede realizar un rendimiento confiable en una amplia gama de paradas en la parada.
Para mejorar el rendimiento, la configuración de la máquina utilizada en el modelo debe ser lo más precisa posible. De lo contrario, se pueden corregir utilizando un proceso de corrección, de modo que el acoplamiento exacto sea posible. El proceso de corrección mejora el parámetro.
La estimación del flujo indirecto, así como la identificación o adaptación conocida como parámetros, se utilizan para obtener un motor de inducción con un acoplamiento perfecto.
El flujo estimado de las variables detectadas reales de la corriente y la velocidad con los parámetros, se compara con el valor de referencia (determinado a partir de las cantidades de referencia). La diferencia se usa para corregir los parámetros de la máquina que ingresa a los cálculos.
El parámetro más influyente es la resistencia del rotor o la constante de tiempo del rotor y se corrige hasta que el modelo dio el valor requerido del flujo.
La única solución para el control orientado al campo con la adaptación de los parámetros es el uso de microprocesadores o microcomputadoras. Varias técnicas están disponibles en la literatura para adaptar los parámetros. Tal diagrama se ilustra en la Figura 8.13.
El microprocesador debe llevar a cabo operaciones matemáticas para estimar el flujo de los valores de referencia, así como las variables medidas.

Seleccionar un microprocesador para la aplicación anterior puede basarse en las siguientes consideraciones:
- Resolución del premio para el rectificador controlado en fase. La resolución decide sobre la asimetría en el tiroteo.
- Operaciones matemáticas que se pueden llevar a cabo. Debe ser capaz de aritmética binaria y decimal, incluida la multiplicación y la división
- La capacidad de memoria requerida
- Generación de reloj interno
- Gestión de software para la implementación de controladores, limitadores, etc.
- Capacidad de interrupción
Algunas otras aplicaciones de un microprocesador en el control de los motores de inducción son:
- Se puede usar un microprocesador a la velocidad de cohtrol utilizando un controlador de voltaje
- Se puede usar para controlar la velocidad utilizando el esquema de recuperación de energía deslizante. El control de los vertores también se puede usar aquí.
- Se puede utilizar para un lector controlado controlado con el flujo y el control de par en el entrenamiento de CSI alimentado.
- Se puede utilizar para implementar técnicas PWM para controlar la tensión y los armónicos tanto en los motores de inducción VSI como en CSI.
- Se puede usar para controlar el cicloconverteur.