Control orientado al motor de inducción: motor de inducción:
En discos controlados deslizantes usando VSI o CSI discutido en secciones anteriores, el voltaje del estator o la corriente del estator se controlan utilizando la frecuencia de deslizamiento. Se controlan solo en amplitud.
El control de la corriente del estator no admite su posición de fase en comparación con el flujo. El control no proporciona un comportamiento dinámico satisfactorio. Hay una respuesta oscilatoria a los cambios en la frecuencia del rotor.
La respuesta dinámica se puede mejorar utilizando el principio de control orientado al suelo del motor de inducción donde la corriente del estator se controla tanto en amplitud como en posición de fase en comparación con el flujo.
En el control de la tierra del motor de inducción, la corriente del estator tiene la función de proporcionar flujo y par.
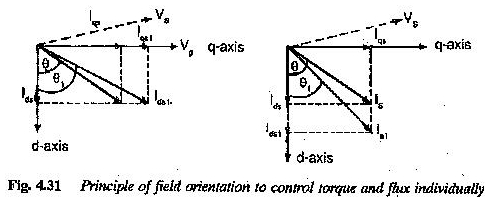
El motor de inducción tendrá una operación similar a la de un motor de si los componentes de corriente del estator, a saber, la producción de flujo y la producción de par se controlan por separado (Fig. 4.31).
Este es en realidad el caso en un motor de corriente continua donde el par depende de la corriente de refuerzo y del flujo en la corriente de campo. Hay un desacoplamiento inherente entre ellos, pero para los efectos de la reacción del marco.
Estos efectos pueden eliminarse compensando los devanados y hay un desacoplamiento perfecto en un motor CC excitado por separado. Este tipo de desacoplamiento está tentado a controlar los motores de inducción. El principio se llama orientación en el suelo o control del vector.
Este control mejora el rendimiento dinámico del lector a todas las velocidades. La corriente del estator se descompone en dos componentes uno a lo largo del eje D y el otro a lo largo del eje Q.
Los ejes de referencia se eligieron de tal manera que el flujo del rotor esté completamente disponible a lo largo del eje directo. Su componente de cuadratura es cero.
Por lo tanto, el componente de la corriente a lo largo del eje D es el productor de componentes de flujo y que a lo largo del eje Q es el componente productor de torque. Al variar estos componentes de forma independiente, podemos tener un control independiente del flujo y el control de una pareja. Estos están representados en la Fig.
4.31 (a) y (b). En el primero, la variación del flujo se indica mediante un componente de eje directo variable de la corriente, mientras que en el segundo se representa la variación del componente del eje Q del estator.
En consecuencia, el control de la corriente del estator es equivalente no solo a la variación en su magnitud sino también a su ángulo de fase. Por lo tanto, el método se llama control vectorial.
Las técnicas de control de los vectores utilizados para mantener el flujo de espacio de aire constante dan pobres características dinámicas al entrenamiento, ya que el par sigue la frecuencia deslizante con un retraso. Se han desarrollado técnicas para mantener constante el flujo de rotor.
En estos métodos, la pareja sigue sin demora, mejorando así el comportamiento dinámico. Es necesaria una dinámica de alta calidad para el control orientado al suelo del motor de inducción utilizado como actuador.
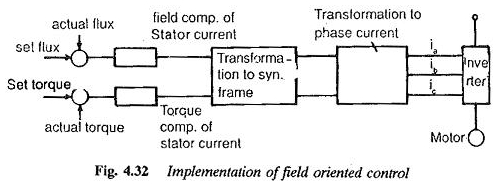
La Figura 4.32 ilustra la implementación del principio de orientación en el suelo. El valor real del flujo del rotor se compara con el valor de referencia y el error así obtenido se usa para controlar el componente del eje directo de la corriente.
Normalmente, este componente se mantiene constante para que el flujo del rotor sea constante. El componente del eje de cuadratura se controla utilizando la señal de error obtenida de la comparación del par real y el par de referencia. Los componentes están en el marco rotativo de manera síncrona.
En consecuencia, el desacoplamiento entre los componentes de la producción de flujos y la producción de par del refuerzo requiere un sistema de coordenadas de referencia y la transformación de las cantidades en este marco de referencia y finalmente dentro del marco del estator,
En este control, que proporciona un comportamiento dinámico muy bueno sin un golpe de pareja de transición, se requiere un flujo secundario, que puede estar disponible de dos maneras:
1. Directamente usando bobinas de detección de flujo.
2. Estimación indirecta del flujo utilizando un modelo de máquina, utilizando cantidades terminales fácilmente medibles, como tensiones y corrientes.
El primer método que utiliza medición directa ofrece buenos resultados y es probablemente el método de control más preciso disponible. La medición se lleva a cabo mediante bobinas de investigación, sondas salas o cualquier otra técnica para medir el flujo.
El flujo medido se utiliza para hacer el desacoplamiento limpio entre los componentes de la producción de par y la producción del flujo de corriente del estator. El método es esencialmente insensible a las variaciones en los parámetros. Sin embargo, el motor de la jaula pierde su robustez y su simplicidad de construcción.
Si intentamos mantener la robustez y la simplicidad del motor, el flujo se obtiene utilizando el segundo método. El flujo del rotor se estima desde el vector de voltaje del estator, el vector de corriente y la velocidad del rotor. Este flujo estimado se alimenta con el controlador de torque.
Este enfoque es sensible a los errores en los parámetros. La resistencia del rotor, las fugas y otros parámetros deben determinarse con precisión para lograr un rendimiento equivalente a la medición directa.
Desafortunadamente, los parámetros del motor utilizados en el cálculo se determinan a partir de pruebas de vacío y no representan los valores de los parámetros realmente presentes en el punto de operación.
Además, estos parámetros varían considerablemente con saturación, temperatura, frecuencia y amplitud de la corriente. El nivel de flujo secundario puede modificarse por la variación en los parámetros. Estas variaciones en los parámetros causan un control de flujo erróneo, lo que deteriora el rendimiento dinámico.
Para evitar errores debido a la variación en los valores de los parámetros (principalmente resistencia al rotor), ya sea debido a una estimación incorrecta, o debido a las condiciones de funcionamiento del motor, se ha utilizado la identificación o adaptación de parámetros automáticos.
Los métodos identifican los cambios en el rendimiento debido a la variación de los parámetros y corrigen los parámetros en consecuencia.
El error entre el valor estimado del flujo y el flujo deseado en el motor se usa para corregir el parámetro más influyente, que es la resistencia del rotor o la constante de tiempo del rotor, de modo que el modelo de la máquina proporciona el valor requerido del flujo sin ningún error.
Otro método discutido recientemente es una técnica en línea para establecer el valor exacto de la resistencia al rotor del motor de inducción. La identificación se obtiene inyectando una corriente de secuencia negativa y detectando la tensión de la secuencia negativa.
El valor de la resistencia del rotor se calcula utilizando información. El control orientado en el suelo del motor de inducción corrige el valor de la resistencia al rotor sin la necesidad de un sensor térmico.
Los métodos de retroalimentación de observadores de estado también se utilizan para la identificación de parámetros.
Con el advenimiento de los microprocesadores (μP) y las microcomputadoras, ahora es posible resolver de manera efectiva los problemas vinculados a los discos con el sistema de entrenamiento. El vector de flujo se puede determinar muy fácilmente.
Para llevar a cabo la coincidencia del modelo del motor y la identificación de los parámetros del rotor mediante un procedimiento de correlación, μP puede ser muy efectivo sin ninguna medida adicional.
Los μP también facilitan la implementación de algoritmos sofisticados para generar secuencias de disparo de inversores.
Además, el proceso desarrollado en el control orientado al campo del sistema de entrenamiento general se ha vuelto económicamente factible, ya que el costoso hardware utilizado hasta ahora puede ser reemplazado por software.
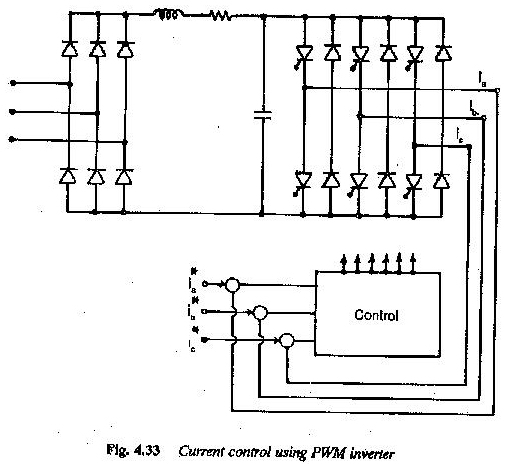
La orientación del campo se puede implementar muy fácilmente con CSI alimentando un control orientado en el motor del motor de inducción. Como el inversor PWM tiene un buen comportamiento dinámico, estos se usan con un control de corriente en el lado de la salida.
La Figura 4.33 ilustra el principio del control de corriente utilizando el inversor PWM. Esto tiene las ventajas de VSI y CSI.
Motorbots de inducción en el modo de flujo del flujo:
En el caso de la corriente continua, las velocidades de los motores por encima de la velocidad básica se obtienen reduciendo la corriente de campo a un voltaje de integración constante. La pareja desarrolló disminuciones. Se puede llevar a cabo un modo de potencia constante en este rango de velocidad y se llama el flujo del flujo.
Se puede observar un comportamiento similar en el caso de los motores de inducción. La tensión alcanza su valor nominal para la frecuencia nominal. Para frecuencias por encima de este valor, la tensión del tensor se mantiene constante. La velocidad del motor aumenta en proporción a la frecuencia.
Debido al aumento de la frecuencia, el flujo del espacio del aire disminuye. El par en una frecuencia de rotor dada es inversamente proporcional al cuadrado de la frecuencia del estator y la potencia desarrollada no es constante. El comportamiento dinámico en condiciones de flujo debilitadas es muy pobre. Esto se puede mejorar mediante una frecuencia deslizante variable para un torque máximo proporcional a la frecuencia.
Un motor con una fuente de alimentación actual tiene un buen comportamiento dinámico cuando hay un voltaje de reserva en el inversor.
Una vez que se alcanza un cierto valor de mayor frecuencia, la EMF trasera del motor es igual al voltaje aplicado y no hay voltaje de reserva para el control de corriente.
El valor real del flujo de estator y rotor se escapa de los valores deseados y el lector tiene un mal comportamiento dinámico. Mejorar el rendimiento dinámico del motor en el modo de debilitamiento de la tierra es un problema de interés.
Esto se puede hacer controlando la amplitud del flujo del rotor y, por lo tanto, la EMF trasera, de modo que una reserva de voltaje suficiente esté disponible en el rango de velocidad por encima de la velocidad básica. Aquí también, se pueden usar métodos directos e indirectos de control de flujo.