Proyecto de esquema de recuperación de energía utilizado en el motor de inducción:
Diagrama de recuperación de potencia deslizante utilizado en el motor de inducción: la Figura 6.53 muestra un circuito equivalente de un motor de inducción del rotor de la herida con un VR de voltaje inyectado en su rotor, suponiendo que la relación del estator -rotor de giros. Cuando se descuida la pérdida de cobre del rotor
![]()
donde el PR es la potencia absorbida por la fuente VR. La amplitud y el signo de PR se pueden controlar controlando la magnitud y la fase VR. Cuando PR es cero, el motor funciona con su característica del par de velocidad natural.
Un PR positivo reducirá el PM y, por lo tanto, el motor funcionará a una velocidad más baja para el mismo par. Cuando PR es igual a PG, PM y, por lo tanto, la velocidad será cero. Por lo tanto, la variación de PR de 0 a PG permitirá la velocidad de velocidad sincrónica a velocidad cero. La polaridad de la VR para esta operación se representa en la Figura 6.53 por una línea continua.
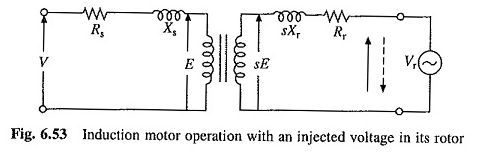
Cuando PR es negativo, IE VR actúa como fuente de energía, PM será más grande que PG y el motor funcionará a una velocidad más alta que la velocidad sincrónica. La polaridad de la VR para el control de velocidad por encima de la velocidad sincrónica está representada por una línea punteada en la Figura 6.53.
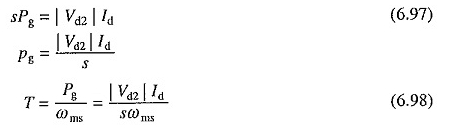
Cuando se descuida la pérdida de cobre del rotor, PR es igual al esquema de recuperación de energía deslizante utilizado en el motor de inducción, SPG. El control de velocidad debajo de la velocidad sincrónica se obtiene controlando la potencia deslizante. El mismo enfoque se adoptó en el control de la resistencia al rotor.
Sin embargo, en lugar de desperdiciar energía en resistencias externas, se usa de manera útil aquí. En consecuencia, estos métodos de control de velocidad se clasifican como un esquema de recuperación de energía deslizante utilizado en los patrones de recuperación del motor de inducción. Aquí se describen dos de estos patrones, el entrenamiento estático de Sherbius estático y Kramer.
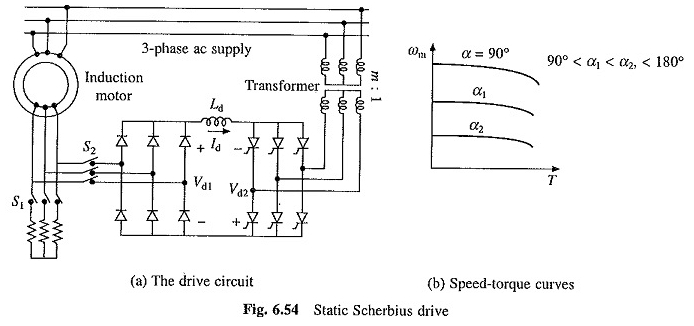
Drive de Scherbius estático (Fig. 6.54 (a)):
Proporciona control de velocidad de un motor de rotor de heridas bajo velocidad sincrónica. Parte de la potencia de CA del rotor se convierte en CC por un puente de diodo. El rectificador controlado que funciona como un inversor lo convierte en AC y lo devuelve a la fuente de CA. El poder ha sido devuelto (es decir
Pr) se puede verificar controlando el contador de inversor EMF VD2, que a su vez es controlador controlando el ángulo de tensor. La inductancia del enlace CC se proporciona para reducir la onda en el enlace CC actual.
Dado que el esquema de recuperación de la potencia deslizante utilizada en el motor de inducción se administra a la fuente, a diferencia del control de la resistencia del rotor donde se desperdicia en resistencia, la conducción tiene una alta eficiencia.
El lector tiene una mayor eficiencia que el control de voltaje del estator por los controladores de voltaje de CA por las mismas razones.
La fuente de alimentación de entrada de conducción es la diferencia entre la potencia de entrada del motor y la potencia devuelta. La potencia de entrada reactiva es la suma de las potencias reactivas del motor y el inversor. Por lo tanto, el disco tiene un mal factor de potencia en toda la playa de su operación.
En la Figura 6.54 (a), descuidando el estator y las gotas de rotor

Donde α es el ángulo de disparo del inversor y, n y m son, respectivamente, la relación estator / rotor de giros de la relación del motor y el lado de la fuente con convertidor de los giros en el transformador. Descuidar la caída a través del inductor
![]()
Sustituyendo ecuaciones. (6.93) y (6.94)

donde a = n / m.
El valor máximo de α se limita a 165 ° para una conmutación segura de los tiristores del inversor. El cambio se puede verificar de 0 a 0.966a cuando α pasó de 90 a 165 °. Mediante la elección apropiada de A, se puede obtener el rango de velocidad requerido.
El transformador se utiliza para corresponder a los voltajes VD1 y VD2. A la velocidad más baja del lector, VD1 tendrá el valor máximo de VD1M dado por
![]()
donde Smax es el valor del deslizamiento a la velocidad más baja. Si α se limita a 165 °, M se elige de tal manera que la tensión del inversor tiene un valor VD1M cuando α es 165 °, es decir,

Tal elección de M asegura el funcionamiento del inversor en el ángulo de disparo más alto a la velocidad del motor más baja, lo que da el factor de potencia más alto (Eqn. (5.109)) y la potencia reactiva más baja a la velocidad más baja.
Esto mejora el factor de potencia en la tubería y reduce la potencia reactiva a todas las velocidades del rango de velocidad del lector.
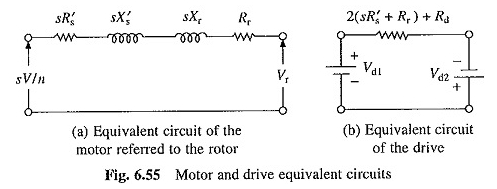
La Figura 6.55 (a) muestra un circuito de motor equivalente referido al rotor, descuidando la rama de magnetización. Derivación de la ecuación. (6.90) muestra que cuando se remite al enlace DC, la resistencia (SR + RR) será 2 (SR + RR). Esto proporciona un circuito equivalente CC aproximado del lector (Fig.
6.55 (b)), donde se dan VD1 y VD2 en las ecuaciones. (6.93) y (6.94). RD es la resistencia de la inductancia de conexión DC. El circuito equivalente ignora la conmutación sobre el puente de diodo. AHORA

Si se descuida la pérdida de cobre del rotor
La naturaleza de las curvas de par de velocidad se representa en la Figura 6.54 (6).
El lector tiene aplicaciones en los discos del ventilador y la bomba que requiere control de velocidad solo en un rango estrecho. Si SMAX indica el deslizamiento máximo, entonces las evaluaciones de potencia del puente de diodo, el inversor y el transformador pueden ser solo SMAX, la potencia del motor (Ec. 6.97).
Por ejemplo, cuando la velocidad debe reducirse por debajo de la velocidad sincrónica en solo un 20%, las evaluaciones de potencia del puente de diodo, el inversor y el transformador solo serán el 20% de la potencia del motor. Por lo tanto, la unidad tiene un bajo costo.
El lector se inicia controlando la resistencia con S1 cerrado y S2 abierto (Fig. 6.54). Cuando la velocidad alcanza el rango de control del lector, S2 está cerrado para conectar el puente de diodo y se activa el inversor. Ahora S1 está abierto para eliminar la resistencia.
En los fanáticos y el entrenamiento de la bomba, el frenado no es necesario, porque la presión del fluido proporciona un par de frenado adecuado. Para mantener un flujo de fluido constante con variaciones en el cabezal de presión y la naturaleza del fluido bombeado, el lector se usa con control de velocidad de circuito cerrado.
En la Figura 6.56 se ilustra un esquema de control de la velocidad del bucle de cierre con el control de la corriente interna. Funciona de la misma manera que el diagrama de la Figura 3.5.
Este disco se usa ampliamente en el entrenamiento de ventilador y bomba mediano y alto (hasta aproximadamente 10 MW), debido a la alta eficiencia y el bajo costo.
Este disco proporciona control constante de torque (Eqn. (6.98)). El control de potencia constante es obtenido por el jugador Kramer estático que se describe a continuación.
Drive Kramer Static:
La potencia deslizante del rotor se convierte en CC por un puente de diodo (Fig. 6.57 (a)). La potencia CC ahora se transforma en un motor CC acoplado mecánicamente con el motor de inducción. La pareja suministrada a expensas es una suma de par producida por los motores de inducción y corriente continua. El control de velocidad se obtiene controlando el campo del motor de corriente continua.

La Figura 6.57 (b) muestra variaciones en VD1 y VD2 con una velocidad para dos valores de corriente de energía del motor DC. La operación permanente se obtiene cuando vd1 = vd2, es decir, à a y b para campos de campo IF1 e IF2.
El control de velocidad es posible de velocidad sincrónica aproximadamente la mitad de la velocidad sincrónica. Cuando se requiere un rango de velocidad más grande, el puente de diodo se reemplaza por un puente de tiristores.
Ahora, la relación entre VD1 y la velocidad se puede cambiar controlando la ira del rectificador del rectificador del tiristor (ver Fig. 6.57 (c)). La velocidad ahora se puede verificar hasta que se detenga.