Freno de motor de inducción dinámica (o frenado reostático):
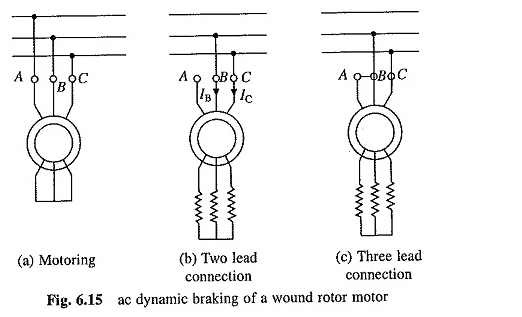
(A) El freno dinámico de CA: el frenado dinámico de CA del motor de inducción se obtiene cuando el motor se ejecuta en una fuente de alimentación de una sola fase desconectando una fase de origen y dejándola abierta (Fig. 6.15 (b)) o conectándola con otra fase de máquina (Fig. 6.15 (c)).
Las dos conexiones de higos. 6.15 (b) y (c) se denominan respectivamente conexiones de dos y tres de plomo. Cuando está conectado a una fuente de alimentación de 1 fase, el motor puede considerarse alimentado por una secuencia positiva y negativa en tres fases de voltajes.
El par neto producido por la máquina es una suma de parejas debido a tensiones de secuencia positivas y negativas. Cuando el rotor tiene alta resistencia, el par neto es negativo y se obtiene la operación de frenado. El análisis del motor para dos y tres conexiones de plomo se realiza de la siguiente manera:
Dos conexiones de plomo: suponga que la fase A de un motor conectado en Y allí en el circuito abierto. Entonces ia = 0 e ic = -ib. En consecuencia, los componentes de la secuencia positiva y negativa IP y, respectivamente, están dados por

donde α viene dado por la ecuación. (6.17).
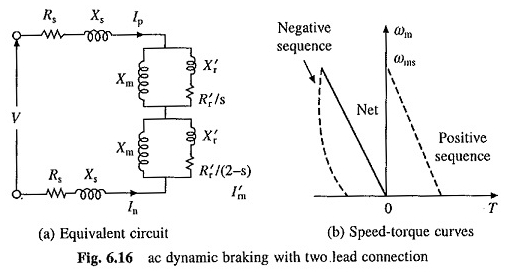
Como los componentes de secuencia positiva y negativa son iguales y opuestos, se pueden conectar dos circuitos equivalentes a la oposición de la serie. El voltaje que se aplicará a esta combinación en serie será

Con un voltaje aplicado JVBC / √3 Si la corriente es ip = – in = jib / √3, sigue solo con un voltaje de fase aplicada V, la corriente sería Ib / √3. Por lo tanto, el circuito equivalente se puede dibujar como se muestra en la Figura 6.16 (a).
Aunque los valores de los componentes de secuencia positivos y negativos de la corriente son iguales, las parejas correspondientes no lo son. La naturaleza de las curvas de velocidad de velocidad para las corrientes de secuencia positiva y negativa y el par neto se representan en la Figura 6.16 (b).
Mediante la elección adecuada de resistencia al rotor, el par de frenado se puede obtener en todo el rango de velocidad. Como la resistencia al rotor requerida es grande, el frenado dinámico de CA del motor de inducción solo se puede usar en los motores del rotor de la herida.
En este sentido a las altas velocidades (o valores deslizantes bajos), la impedancia de la parte de un componente de secuencia positiva se vuelve muy alta. Dado que los componentes de una secuencia positiva y negativa de la corriente deben ser iguales, el par de frenado neto es pequeño y, por lo tanto, el frenado no es muy efectivo.
Conexión a tres gránulos: aquí, dos fases del carrete del motor conectado conectado Y están conectadas en paralelo en serie con la tercera fase (Fig. 6.15 (c)). Deja las fases A y B

A diferencia de las dos conexiones de plomo, la magnitud de los componentes de una secuencia positiva y negativa de la tensión es igual y no los componentes de la secuencia positiva y negativa de las corrientes. El circuito equivalente se ilustra en la Figura 6.17.
Las partes de una secuencia positiva y negativa del circuito son independientes y, por lo tanto, no se impone restricción al componente de secuencia negativa de la corriente por una parte de secuencia positiva del circuito equivalente.
Por lo tanto, se obtienen parejas de frenado más altas (en comparación con dos conexiones de plomo) a altas velocidades. La naturaleza de la característica de la velocidad del pollo con esta conexión es la misma que la de la Figura 616 (b).
Cualquier desigualdad entre las resistencias de contacto en las conexiones de dos fases en paralelo reduce el par de frenado e incluso puede conducir a un par automotriz, porque la condición tiende más a dos conexiones de plomo con una resistencia creciente en una de las dos fases (como la resistencia al rotor utilizado es menor que la conexión a dos plomo).
En consecuencia, la conexión con dos plomo generalmente se prefiere a pesar de su par débil. La principal aplicación de frenado de CA de una sola fase es la altura de la grúa.
(b) Frenado autoexcitado usando condensadores: en este método, tres condensadores se mantienen constantemente conectados a través de los terminales del motor. Los valores de los condensadores se eligen así como cuando se desconectan de la línea, el motor funciona como un generador de inducción autoexcitado.
La conexión de frenado se representa en la Figura 6.18 (a) y el proceso de autoexpresión se explica en la Figura 6.18 (b) para ninguna condición de carga. La curva A no es una curva de magnetización de la máquina de la máquina a una velocidad dada, y la línea B representa la corriente a través de los condensadores, dada por
![]()
donde E es el estator inducido por el estator por fase.
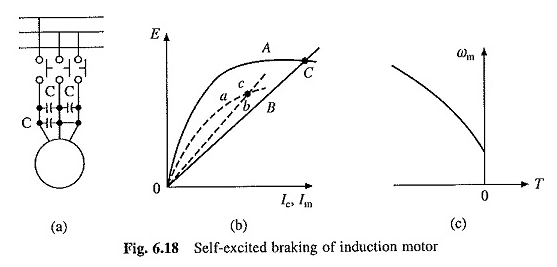
Los condensadores proporcionan la corriente reactiva necesaria para la emoción. La operación ocurre en el punto C, que es la intersección de dos características. Cuando cae la velocidad, se obtiene el valor de E para la misma corriente de magnetización y la nueva característica de la magnetización A.
Por otro lado, la pendiente de la característica E contra IC aumenta al dar una nueva característica B. La intersección de dos curvas ahora ocurre c. Por lo tanto, la reducción en la velocidad mientras mueve las curvas de magnetización hacia abajo, la pendiente de la tensión del condensador frente a la curva de corriente aumenta.
A cierta velocidad crítica, que generalmente es alta, dos curvas no se encuentran y la máquina no se excita y el par de frenado cae a cero. La característica de la velocidad de freno autoexcitado se representa en la Figura 6.18 (c).
A veces, las resistencias externas están conectadas en los terminales del estator para aumentar el par de frenado y disipar una cierta energía generada fuera de la máquina. La construcción de la Figura 6.18 (b) solo es válida para cualquier operación de carga.
Para un análisis más preciso, se debe tener en cuenta la reducción de la impedancia motora. Este diagrama rara vez se usa, porque el par de frenado cae a cero a una velocidad que generalmente es alta.
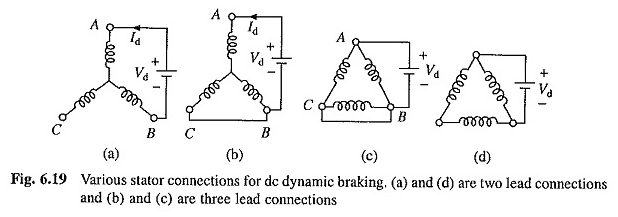
(C) CC de freno dinámico: se obtiene cuando el estator de un motor de inducción que funciona a una velocidad está conectado a una fuente de alimentación directa. Dos conexiones comúnmente utilizadas, dos y tres de plomo, para conexiones Star y Delta se representan en la Figura 6.19.
En la Figura 6.20 se ilustra un método para obtener el suministro de CC utilizando un puente de diodo para dos conexiones de plomo.
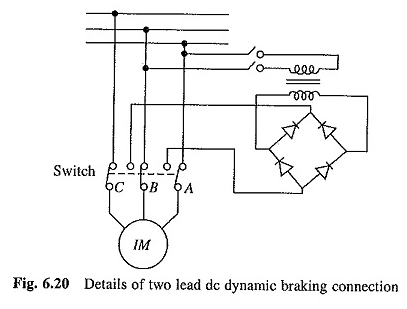
La corriente de CC que cruza el estator produce un campo magnético estacionario. El movimiento del rotor en este campo induce una tensión en el rotor del rotor. Por lo tanto, la máquina funciona como generador.
La energía generada se disipa en la resistencia al circuito del rotor, dando así el frenado dinámico del motor de inducción.
Como el campo es estacionario, la velocidad relativa entre los controladores del rotor y el campo ahora es Ωm. La frecuencia de voltaje inducida será igual a la frecuencia del voltaje de la fuente Ca (o la frecuencia del motor nominal) cuando Ωm = Ωms.
O el voltaje inducido en el rotor durante la carrera a una velocidad sincrónica. Cuando funciona a una velocidad Ωm, el voltaje inducido y su frecuencia serán SER y SF respectivamente. ENTONCES

Esto proporciona un circuito equivalente en la fase de la Figura 6.21 (a) para el rotor. La división de todas las cantidades por S producirá un circuito equivalente a la frecuencia nominal.
En referencia a varios parámetros de circuito equivalentes, así obtenidos de las torres del estator, proporciona un circuito equivalente en la fase del rotor ilustrado en la Figura 6.21 (b). El circuito equivalente del estator bajo el frenado dinámico de CC del motor de inducción se ilustra en la Figura 6.21 (c).
Para combinar con un circuito de rotor equivalente en la Figura 6.21 (b), primero debemos obtener un circuito equivalente por fase del estator a la frecuencia nominal. Circuito equivalente La Fig. 6.21 (c) sugiere que el estator MMF es constante e independiente de la velocidad.
Por lo tanto, imaginamos que el estator funciona con una fuente de energía equilibrada de tres fases de frecuencia nominal, dando una corriente de fase. La CA actual es equivalente a ID siempre que produzca MMF del estator de la misma amplitud que la ID de corriente CC.
Por lo tanto, reemplazamos un estator MMF estacionario producido por la ID de corriente CC con un MMF (producido por IS) de amplitud idéntica pero girando a velocidad sincrónica.
La diferencia de estos dos MMF será un MMF de la brecha de aire que será responsable de la producción de Air-Gap que, a su vez, causa la tensión de la frecuencia nominal inducida en el estator. El circuito equivalente en la fase del estator en la frecuencia nominal toma la forma ilustrada en la Figura 6.21 (d).
La combinación de circuitos equivalentes de la figura 6.21 (6) y (d) y la retirada del transformador da una frecuencia nominal por circuito equivalente en la fase (Fig. 6.21 (e)).

Es pequeño para Small S, y por lo tanto, IM se acerca. Debido a un alto valor de mensajes instantáneos, el circuito magnético está saturado. Por lo tanto, XM no es constante pero varía con IM. Para un análisis preciso, la variación de XM con IM debe tenerse en cuenta.
La relación entre IS e ID depende de la conexión del estator. Por ejemplo, derivemos para las dos conexiones de plomo en la Figura 6.19 (a). Aquí ia = id e ib = – id.
Si N es un número efectivo de giros en cada devanado, el MMF máximo producido por la fase A será IDN y el MMF máximo producido por la fase B será (-idn). Suponiendo que estos MMF se distribuyan sinusoidalmente en el espacio, el resultado del MMF resultante será
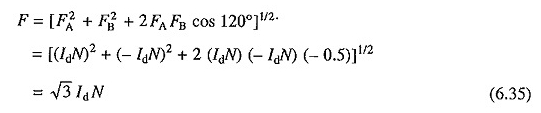
Cuando la máquina funciona con una fuente de corriente de tres fases equilibrada, el pico MMF del estator es

Es equivalente a ID cuando f = f ‘. Por lo tanto, de las ecuaciones. (6.35) y (6.36)
![]()
Los valores de son para otras conexiones (Fig. 6.19 (b), (c) y (d), respectivamente) son:
![]()
La característica de la velocidad TORCA se calcula de la siguiente manera.
Del circuito equivalente de la Figura 6.21 (e)
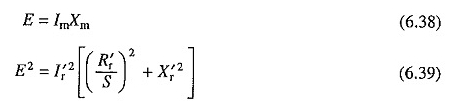
Considere la distribución de corrientes entre las ramas paralelas formadas por XM y el rotor

Resta de la ecuación. (6.39) de (6.40) rendimientos

De la ecuación (6.39)

El par motor es

Dado que XM depende de la IM, las ecuaciones. (6.38) – (6.42) son ecuaciones algebraicas no lineales. El uso de los siguientes pasos evita la necesidad de una solución digital. Supongamos que un valor IM, obtenga E correspondiente a la característica de magnetización, calcule XM a partir de la ecuación.
(6.38), obtenga la R de (6.41), calcule S de (6.42) y luego Ωm y T de las ecuaciones. (6.34) y (6.43), respectivamente.
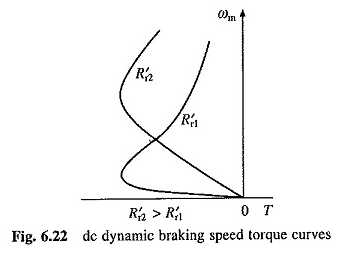
La Figura 6.22 muestra la naturaleza de las curvas de torque de velocidad para dos valores de resistencia al rotor. En un motor de jaula de ardilla o un motor del rotor de la herida sin resistencia externa en el rotor, el par máximo ocurre a baja velocidad.
Mientras que el par máximo es independiente de la resistencia del rotor, la velocidad a la que ocurre el par máximo aumenta con la resistencia al rotor. Cuando la fig.
6.22 Del de frenado dinámico de la velocidad de inducción Curvas de pareja de pareja es necesaria, el frenado rápido es necesario, la resistencia sensacional está conectada en el circuito del rotor y se corta a medida que cae la velocidad.
Cuando se usa para mantener una carga activa, como en los enurvertidos de la mina, se conecta una alta resistencia para obtener curvas de aceleración con una pendiente negativa, para garantizar la estabilidad en el estado de equilibrio.
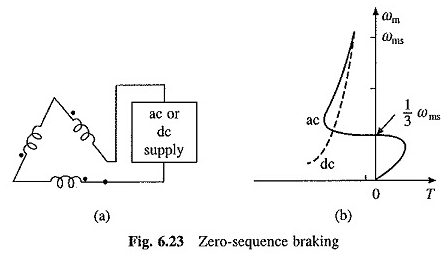
(d) Secuencia cero libre: en este frenado, tres fases del estator están conectadas en serie a través de una fuente de CA o CC de fase única como se muestra en la Figura 6.23 (a). Dicha conexión se conoce como una conexión de secuencia cero, porque las corrientes en todos los aspectos más destacados del estator son conjuntas.
El MMF causado por las corrientes de co-country (o secuencia cero) produce un campo magnético tres veces el número de polos para los cuales la máquina realmente se enrolla. Con una fuente de alimentación de CA, el campo resultante es estacionario en el espacio y va a la frecuencia de la fuente de alimentación.
Con la fuente de alimentación DCE, el campo resultante es estacionario en el espacio y es de magnitud constante. Una ventaja importante de esta conexión es la carga uniforme de todas las fases del estator. La naturaleza de las curvas de velocidad para la fuente de alimentación de CA y CC se ilustra en la Figura 6.23 (b).
Con el suministro de corriente alterna, el frenado solo se puede usar hasta un tercio de velocidad sincrónica. Sin embargo, las parejas de frenado producidas por esta conexión son considerablemente mayores que el automóvil. El motor funciona principalmente en frenado regenerativo.
Para los motores de baja resistencia al rotor, se recupera una parte importante de la energía generada. A diferencia del frenado dinámico de CA del motor de inducción, no requiere alta resistencia al rotor y, por lo tanto, puede usarse ambos, con motores de ardilla y motores de Roton.
Con la fuente de alimentación, el frenado está disponible en todo el rango de velocidad. Es esencialmente frenado dinámico porque toda la energía generada se desperdicia en la resistencia del rotor.
La disposición de conmutación, desde la operación de tres fases hasta el cero normal, es extremadamente simple cuando el motor tiene un estator delta conectado.