Frenado del motor de inducción:
Los tres tipos de frenado de motor de inducción, a saber, el frenado regenerativo, dinámico y contracorriente también se pueden lograr con motores de inducción.
Frenado regenerativo
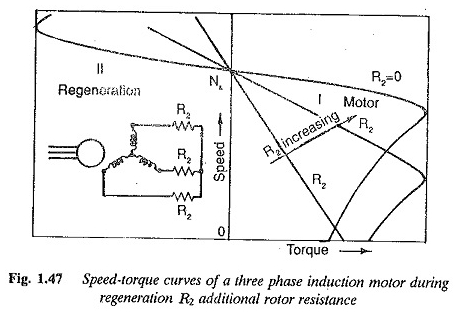
Cuando el rotor de un motor de inducción funciona más rápido que el campo del estator, el cambio se vuelve negativo y la máquina genera energía. Por lo tanto, cada vez que el motor tiende a funcionar más rápido que el campo rotativo, se produce el frenado regenerativo y KE
Las piezas rotativas se devuelven al sector. La curva de velocidad del par se extiende al segundo cuadrante (Fig. 1.47). La velocidad del motor disminuye. El par de frenado opera el motor a una velocidad constante, deteniendo su tendencia a girar más rápidamente.
Debido a los efectos de la resistencia al estator, el par máximo desarrollado durante la regeneración es más alto que el par máximo durante la manga. En palenares y grúas, el motor de transmisión tiende a funcionar más rápido que la velocidad sincrónica.
Esta situación ocurre cuando el polipasto eleva una jaula vacía. Debido al contrapeso, el caso puede adquirir velocidades peligrosas. La transición se lleva a cabo casi automáticamente y se desarrolla una pareja para detener la aceleración y la regeneración.
Este tipo de operación también es posible cuando la carga revisa el motor durante la carga de la carga. La regeneración automática detiene la aceleración excesiva. El control de resistencia al rotor se puede usar para obtener un mejor par de frenado.
El frenado regenerativo también es posible con un motor de cambio de poste cuando la velocidad ha pasado de alta a baja. También se puede lograr en un lector de frecuencia variable.
Al disminuir temporalmente la frecuencia del motor, la velocidad sincrónica disminuye y las condiciones favorables a la regeneración tienen lugar.
Durante el frenado regenerativo, existe la posibilidad de velocidades peligrosas si el punto de operación durante el frenado cae en la parte inestable de la característica. Esto sucede si el par de carga es mayor que el par de falla del motor.
El par desarrollado no puede ralentizar el motor y se produce una aceleración excesiva. Esta posibilidad puede eliminarse mediante alta resistencia en el rotor.
Frenado dinámico
El frenado dinámico se usa para frenar un lector no reversible. El estator se transfiere de AC del sector a los platos principales (Fig. 1.48 (a)). El DC que cruza el estator instala un campo estacionario. Esto induce corrientes del rotor que producen una pareja para traer el rotor rápidamente.
El par se ha desarrollado y el retraso durante el frenado puede controlarse por la cantidad de potencia DC. Resistencia adicional R1 y R2E en el estator y los circuitos de rotor controlan respectivamente la excitación de CC y las parejas de frenado.

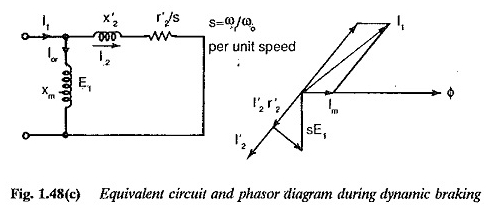
El circuito equivalente y el diagrama de fase del motor durante el frenado dinámico se representan en la Figura 1.48 (c). Cuando el estator está alimentado por DC, el producto MMF es estacionario. Este MMF depende de las conexiones del estator para la fuente de alimentación de CC, el número de vueltas y la corriente.
Las posibles conexiones del estator para la fuente de alimentación de CC se representan en la Figura 1.49. La corriente CC equivalente se puede determinar asimilando los MMF producidos por esta corriente equivalente y la corriente de CA.
La corriente primaria equivalente es responsable de la magnetización y la corriente secundaria del par. La pareja se da por

¿Dónde está un cambio?
Del circuito equivalente que tenemos

Además, del diagrama de fase, tenemos
![]()
A partir del cual se puede determinar mi. El valor de XM está dado por
![]()
La pareja es

La curva de deslizamiento de par se puede determinar usando esta expresión. El par máximo ocurre en un turno

Y el máximo par de frenado es

La característica también se puede dibujar utilizando la relación

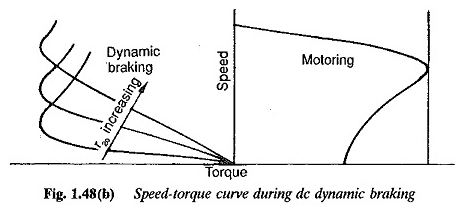
El par de frenado es proporcional a I21. Sin embargo, la saturación juega su propio papel y hay un agotamiento de una pareja. El efecto de R′2 es similar a los efectos durante la conducción, es decir
No modifica el valor de TMB, pero modifica el valor de la velocidad a la que ocurre el TMB. Las curvas de velocidad de velocidad típicas se representan en la Figura 1.48.
Los valores de I1 y R′2 se controlan para proporcionar el frenado deseado. El primero está limitado por R1. Este método generalmente se aplica para ralentizar motores que causan cargas activas. El frenado dinámico se usa conjuntamente con control automático. El frenado del motor de inducción es más popular en los palenares que en el motor de CC, debido a esta funcionalidad.
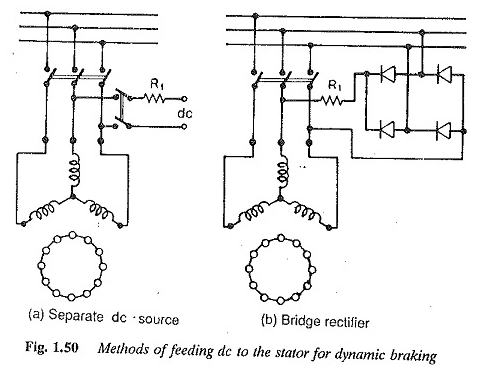
Los métodos de suministro de una fuente de alimentación directa del estator se representan en la Fig, 1.50. Puede ser proporcionado por una fuente de alimentación CC utilizando una resistencia limitada R1 en el circuito para controlar la excitación de CC. El control de par se obtiene por variación en la resistencia del rotor.
Alternativamente, se puede rectificar una fuente de alimentación mediante un rectificador de diodos y el DC resultante puede transferirse al motor.
En el frenado dinámico de CA, el estator fue a un banco de capacidad. La máquina funciona como un generador de inducción automático excitado. Toda la energía mecánica se disipa en forma de energía eléctrica en la resistencia del rotor. Este método no es rentable, debido al costo de los condensadores.
Actual
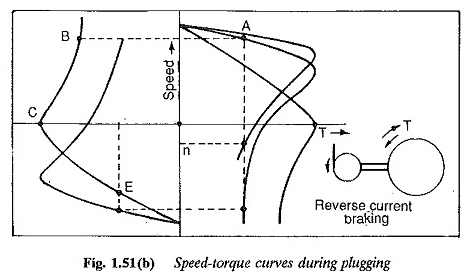
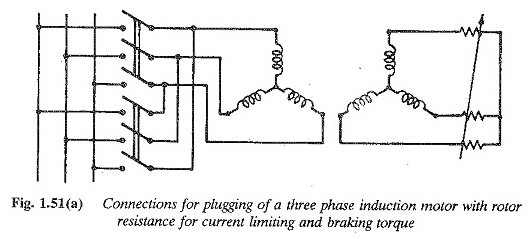
Al modificar la secuencia de fase de la entrada en un frenado de motor de inducción, la dirección del campo del estator se puede revertir. En la práctica, esto se hace intercambiando la fuente de alimentación del motor (Fig. 1.51 (a)).
El par de frenado se desarrolla y el motor descansa muy rápidamente. El motor debe extinguirse del sector cuando se aborda la velocidad cero. De lo contrario, el par desarrollado acelera el motor en la dirección opuesta. Este método también se llama enchufes.
Cuando el motor está bloqueado, el voltaje inducido E en el marco y el voltaje A aplicado puede ser mutuamente y la corriente durante el frenado es causada por E + V.
Esto puede conducir a corrientes muy altas, que están limitadas por una alta resistencia al rotor, y también aumentan efectivamente el par de frenado.
La curva de velocidad de engranaje de un motor de inducción se puede modificar variando la resistencia al rotor. El punto de par máximo se puede hacer para ocurrir en la playa de 1-2 turno, donde la pareja desarrollada tiende a frenar el rotor.
Este par también se puede usar para detener la tendencia del rotor para acelerar por una razón u otra (por ejemplo, la revisión del motor o una pista que aumenta la jaula vacía).
La alta resistencia se introduce en el rotor, de modo que el punto de funcionamiento se mueve al cuarto cuadrante. El par de frenado desarrollado evita cualquier aceleración del rotor y el rotor funciona a una velocidad uniforme (Fig. 1.51 (b)).
Si el motor funciona en un cambio en el momento del tapón, el par de frenado total es la suma del par de conexión a (2 – s) y el par de carga

TP puede controlarse mediante una resistencia variable del rotor que limita la corriente de frenado.