Libre eléctrico de motores de inducción de polifásicos:
Frenado eléctrico de motores de inducción de polifásicos que consisten en diferentes tipos, a saber,
- Branchage (o frenado contracorriente)
- Frenado dinámico (o reostático)
- Frenado regenerativo
1. Branchage (o frenado contra la marea)
El enchufe se puede hacer en un motor de inducción simplemente invirtiendo dos de las tres fases que causan la dirección del campo magnético rotativo.
Al cambiar el motor a la posición de plug -IN, el motor funciona en la dirección opuesta a la del campo y la velocidad relativa es aproximadamente dos veces [(2 – s) de la velocidad sincrónica, es decir, el cambio es casi igual a dos, es igual a (2 – s).
Por lo tanto, el voltaje inducido en el rotor será dos veces de tensión que normalmente se induce en la parada y el devanado debe suministrarse con aislamiento adicional para resistir este gran voltaje.
Durante el período de conexión, el motor actúa como un freno y absorbe la energía cinética de la carga siempre giratoria que causa la caída en su velocidad. La potencia de PMECH asociada se disipa en forma de calor en el motor.
Al mismo tiempo, el rotor también continúa dibujando la potencia del estator que también se disipa en forma de calor. Debido al aumento de la frecuencia del rotor, hay pérdidas de hierro adicionales en el rotor.
Por lo tanto, el calor desarrollado en el rotor durante el período de frenado es aproximadamente tres veces el calor desarrollado durante el período de inicio (o en un estado de rotor bloqueado).
Por lo tanto, el tamaño del motor de inducción donde se debe aplicar el enchufe se decide no cargando las condiciones solas, sino también por frenado.
En el caso de un motor de jaula de ardilla, la energía se disipa por completo en la máquina; Mientras que en el caso de un motor de rotor de la herida, esta energía también se disipa en la resistencia externa agregada en el circuito del rotor para este propósito.
Las condiciones de frenado eléctrico de los motores de inducción de polifásicos se pueden estudiar considerando las curvas de gritos del motor del motor cuando se extienden más allá del punto del 100%, como se muestra en la Figura 1.103 (a).
La ordenación en el punto B representa el par en el momento del tapón y podemos ver que el par aumenta gradualmente a medida que el motor se acerca a la parada, después de lo cual, por supuesto, si la línea de alimentación no está desconectada, se volverá a conectar nuevamente en la dirección opuesta de acuerdo con la velocidad ordinaria de las curvas de torque de A a O.
Por lo tanto, vemos que para devolver el motor, es esencial desconectar la fuente de alimentación al motor a una velocidad cero.

A partir de las curvas deslizantes de torque que se muestran en la Figura 1.103 (a), se observa que la extensión del par de frenado es muy baja en comparación con el par máximo ejercido por el motor. Esto es particularmente así para la baja resistencia del rotor.
A medida que se inserta más y más resistencia en el circuito del rotor, se produce un par máximo a valores crecientes.
Esta es la razón por la cual los motores de inducción de la jaula de la ardilla, que están diseñadas principalmente para la máxima eficiencia y, por lo tanto, para la baja resistencia no son adecuados para este tipo de frenado.
En el caso de los controladores de rotor de las heridas, la adición de resistencia en el circuito del rotor da lugar a más y más par de frenado y, por lo tanto, los controladores del rotor de las heridas son más adecuados para el enchufe.
Si el cambio en la resistencia del rotor se ajusta para ajustar que el par de frenado máximo se ejerce en todas partes, se alcanzará al menos un frenado óptimo al menos

La expresión del par de frenado que descuida la impedancia del estator y la reactancia magnetizante puede deducirse y se administra como

La corriente del rotor se puede determinar durante el período de frenado a partir de la siguiente relación y se traza, como se muestra en la Figura 1.103 (b).

O
- E2 es el EMF induce en cada fase del rotor en una parada,
- R2 es la resistencia al rotor por fase y
- X2 es la reactancia de la parada del rotor por fase y
- S es el cambio.
Durante el período de dicha, dado que el EMF induce en el rotor es muy alto, como ya se indicó anteriormente, la corriente del rotor y la corriente del estator son, por lo tanto, muy altas. Sin embargo, la corriente de frenado se puede reducir insertando una resistencia externa en el circuito del rotor.
Desde este punto también, los impulsores del rotor de las heridas son beneficiosos en comparación con los motores del rotor de la jaula de la ardilla.
Los motores de la jaula de una salida de aproximadamente 20 kW están conectados directamente, utilizando la conexión STAR si se proporciona un interruptor Star-Delta. Los motores más grandes necesitan resistencia al estator. Los motores del rotor de heridas utilizan resistencias de rotor para la limitación de la corriente, así como el desarrollo de parejas de frenado más altas.
Los problemas de calificación térmica pueden ocurrir para los derechos frecuentes de frenado, como ya se explicó anteriormente, y los contactores pueden necesitar un mantenimiento frecuente.
La inversión simultánea de las conexiones del estator y la inclusión de resistencia al rotor en los motores de raíz de las heridas son bastante posibles, pero se puede obtener el mismo efecto al incluir sátuadores en los devanados del rotor.
Alternativamente, una jaula del rotor de barra profunda puede dar un aumento en la resistencia efectiva del rotor después de la operación del tapón porque la frecuencia deslizante aumenta repentinamente de SF a (2 – s) F donde F es la frecuencia de suministro.
En la práctica, para revertir los discos donde el frenado y el arranque del motor de inducción en la dirección opuesta incluyen los pasos del mismo proceso continuo, el enchufe se usa ventajosamente.
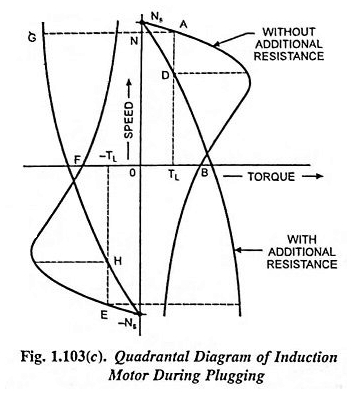
La operación de plug -IN también se puede explicar utilizando un diagrama de cuadrante que se muestra en la Figura 1.103 (c). Las características de la aceleración se muestran en la Figura 1.103 (c) son, de hecho, una extensión de las características del motor en el segundo y cuarto cuadrante. La explicación de la Figura 1.103 (c) es exactamente idéntica a una para la Figura 1.94 (a) o 1.94 (b).
2. Frenado dinámico (o reostático)
En este frenado eléctrico de motores de inducción de polifásicos, el frenado reostático se puede obtener desconectando el devanado del estator de potencia de CA y excitando una fuente CC para producir un campo DC estacionario.
En el frenado reostático, el devanado del estator se usa como devanado de campo de CC y el devanado del rotor como devanado del marco. Con una máquina del rotor de la herida, se pueden insertar resistencias externas en el circuito del rotor para proporcionar una carga. Sin embargo, con las máquinas de jaula ardilla, el rotor del rotor en sí debe formar la carga.
La fuente de emoción puede ser proporcionada por una fuente CC independiente o del sector de CA a través de un conjunto de rectificadores de transformador, como se muestra en la Figura 1.105.
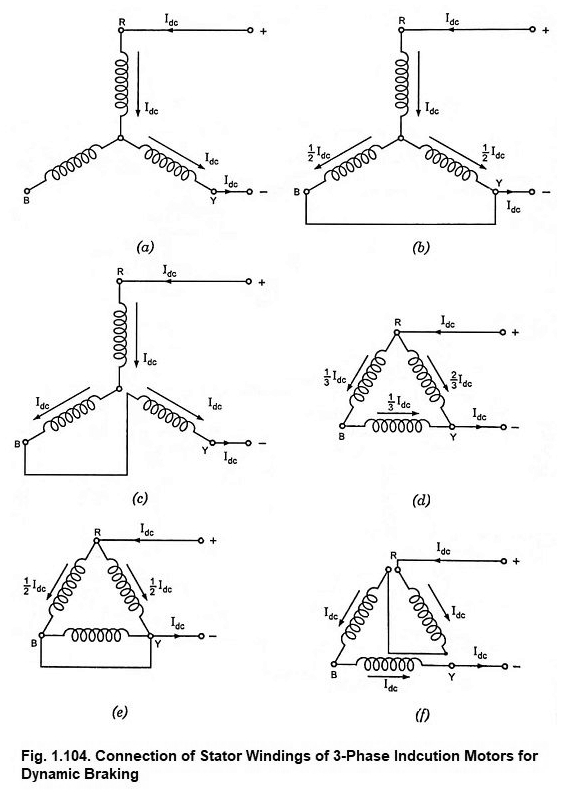
Varios métodos para conectar el estator a una fuente CC se representan en la Figura 1.104. Aunque las conexiones que se muestran en la Fig. 1.104 (c) y 1.104 (f) dan una corriente uniforme de las tres fases, pero son complicadas en la operación de conmutación.
Siendo más simple a este respecto, las conexiones que se muestran en la figura 1.104. (a) y (b) se usan generalmente.

Un diagrama de conexión típico se da en la Figura 1.105; La máquina funciona como un motor con los contactores cerrados, mientras que con el abierto y B cerrado, dos fases del estator suministran una corriente continua, la tercera se deja en el circuito abierto.
La resistencia r ‘se inserta en el circuito del estator para limitar su corriente. En caso de motores de rotor de heridas, se inserta resistencia adicional en el circuito del rotor para controlar el efecto de frenado.
Mientras que la máquina funciona normalmente en forma de motor, su estator de campo magnético funciona a una velocidad sincrónica en la misma dirección que la del rotor, pero ligeramente más rápido que los conductores del rotor.
Cuando los devanados del estator se desconectan de la potencia de CA y se excitan con DC, el campo magnético producido será inmóvil en el espacio, lo que hace que los conductores del rotor excedan el campo con una velocidad (1 – S) NS o SNS.
Las corrientes inducidas en los controladores de rotor se opondrán en la dirección de las correspondientes a la operación automotriz, produciendo un par de frenado.
Aunque el flujo de la brecha de aire es estacionario, habrá la misma cantidad de polos que cuando la máquina está excitada con CA y, por lo tanto, las corrientes del rotor tendrán una frecuencia que está cerca de la frecuencia correspondiente a la velocidad sincrónica (es decir, NS) inicialmente, pero que disminuye con la velocidad del rotor y se convierte en cero para liberar, es la frecuencia de los rotores.
Del mismo modo, el EMF inducido en el rotor disminuye en un máximo cuando se ejecuta el rotor, a cero a la parada.
En otras palabras, SE2 dio el EMF inducido en el rotor donde E2 es la amplitud del EMF inducido en el rotor cuando corre frente al campo a la velocidad NS.
Por lo tanto, se ve que las condiciones del rotor durante el frenado de CC reostático con la velocidad que cae de sincrónica a detenerse es casi las mismas que cuando el motor se acelera normal.
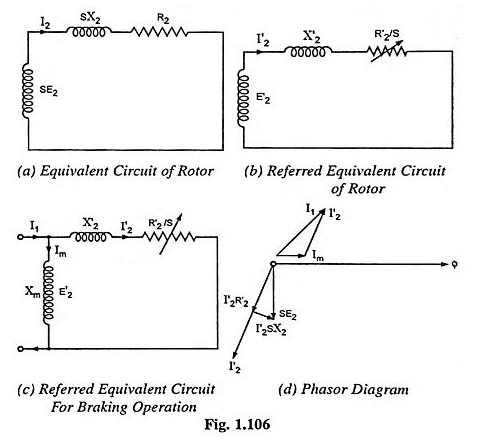
En consecuencia, el circuito equivalente del rotor puede representarse como se indica en la Figura 1.106 (a). Al dividir la tensión y la impedancia por S, tenemos el circuito ilustrado en la Figura 1.106 (b) que lleva la misma corriente I2.
Dado que el devanado del estator solo transporta la corriente continua, la inductancia del estator no tiene ningún efecto bajo la operación en régimen permanente. La tensión CC aplicada a través del devanado del estator solo se fija por resistencia al devanado del estator. No habrá pérdida de hierro en el núcleo del estator.
Pero la pérdida del núcleo del rotor será de considerable magnitud y, por lo tanto, el valor de resistencia al rotor regresado al estator, lo que determina la pareja desarrollada durante el frenado, debe corregirse para tenerlo en cuenta, el EMF induce el rotor, a la velocidad de sincronía, E’2 será dado por IMXM donde la IM representa el paso actual de la magnetización a través del reacción de magnetización.
El circuito ilustrado en la Figura 1.106 (b) se puede modificar en un circuito ilustrado en la Figura 1.106 (c). El diagrama de fase correspondiente a este circuito modificado se ilustra en la Figura 1.106 (d),
Cabe señalar que la corriente del rotor alterna como él es producida por un flujo constante, causado por un MMF IMN1 magnetizante, que permanece estacionaria en el espacio.
Sin embargo, cuando se ve desde el rotor, el magnetador MMF y el flujo resultante en el estator parecerán alternarse.
Además, dado que el rotor ampère-Contrations i2n2 (= i′2n1) debe ser equilibrado por los tatores del estator ampère para mantener las torres de magnetización IMN1, las torres del estator I1N1 como el rotor, representa la suma fasorosa de IMN1 e I′2N1.
La corriente alterna actual I1 depende de la amplitud de la corriente continua transportada por el estator y la naturaleza de las conexiones de devanado del estator, como se explicó anteriormente.
De la discusión anterior, se puede concluir que la operación del motor durante el frenado de CC reostático se puede analizar utilizando el circuito equivalente (el tipo de que ya estamos familiarizados) que se muestra en la Figura 1.106 (c).
El par de frenado se puede determinar a partir de la relación
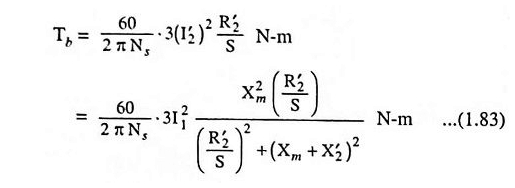
La ecuación anterior nos permite determinar el par de frenado a cualquier velocidad de un motor de inducción dado, cuando está excitado por la corriente continua, i1 correspondiente a una AC equivalente, que habría producido la misma MMF que la corriente continua real transportada por los devanados del estator.
Diferenciar la ecuación. (1.83) WRT S y asimilarlo a cero para un máximo, tenemos un cambio correspondiente al torque de frenado máximo

y una pareja máxima,

Las características de rendimiento típicas de un motor de inducción se ilustran en la Figura 1.107.
La amplitud del par de frenado desarrollado por el motor depende de la excitación (resistencia del campo desarrollado por el rodillo del estator), la resistencia del circuito del rotor y la velocidad del motor.
El efecto de la variación de la excitación I1 y la resistencia del rotor R2 también se ilustra en la Figura 1.107 (a). Para fines de diseño, a veces se usan las curvas de resistencia al rotor de torque ilustrado en la Figura 1.107 (b).
Con el aumento de la resistencia al rotor RO2, la velocidad a la que también aumenta el par de frenado máximo. Sin embargo, el par máximo no aumentaría en proporción al cuadrado actual (I21), como lo indica la ecuación.
(1.85), porque la reactancia de magnetización XM disminuye debido a la saturación causada por un aumento en la corriente I1.
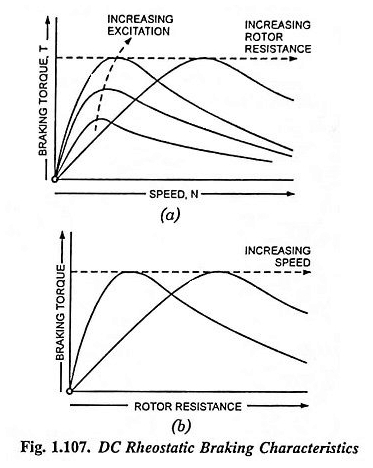
La operación de frenado estable se encuentra en la parte de la subida de la curva de velocidad del par [es decir, en el lado izquierdo de la posición de torque máximo en la Figura 1.107 (a)].
Si inadvertidamente, la velocidad se eleva por encima del que el par es máximo, un nuevo aumento en la velocidad es causado por una disminución en el par de frenado, lo que puede conducir a un nuevo aumento en la velocidad en el caso de una carga de reficción.
Al comienzo de la aplicación de frenado, por lo tanto, necesitamos alta resistencia en el circuito del rotor, que debe reducirse gradualmente con una disminución en la velocidad.
El par de frenado se puede verificar mediante cualquiera o los siguientes dos métodos: (i) controlando el du du du du duc (ii) variando la resistencia al rotor.
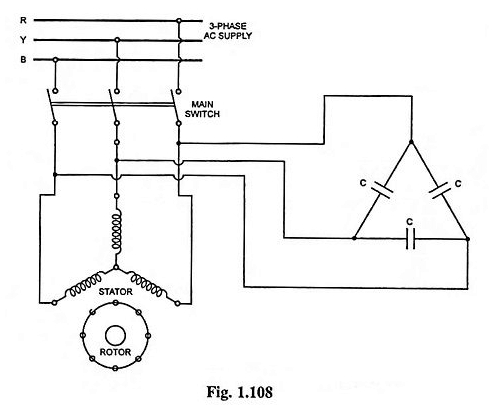
El frenado dinámico de CA se puede obtener con autoexpresión conectando los devanados del estator a un banco de condensadores estáticos, como se muestra en la Figura 1.108. En este caso, la máquina de inducción funciona como un generador de inducción que recibe su emoción de CA de condensadores estáticos.
La energía eléctrica generada se disipa en forma de calor en el circuito del rotor. El frenado dinámico de CA no es popular debido al costo relativamente alto de los bancos de condensadores.
El frenado dinámico de CC requiere poca potencia de la fuente de alimentación y proporciona un par de frenado suave, útil para los devanados mineros y las altas cargas de inercia.
Sus ventajas en comparación con el tapón son la ausencia del campo opuesto de rotación de la rotación [y, por lo tanto, no hay tendencia a la máquina a correr] y una pérdida de rotor inferior. Al aumentar la resistencia del rotor, el par de frenado puede hacerse más efectivo a velocidades más altas.
Por lo tanto, este método es muy adecuado para los cargos de revisión tardía. En el caso de un motor de jaula de ardilla, dado que la resistencia al rotor es pequeña, aplicará el par de frenado a velocidades muy bajas y, por lo tanto, solo útil para traer la carga.
El advenimiento del control automático del frenado dinámico en el frenado eléctrico de los motores de inducción de polifásicos utilizando sistemas de circuito cerrado, hizo que los motores de inducción fueran más populares que los motores DC, en particular para emplear discos en palenares mineros.
La Figura 1.109 muestra las características cuadrantales del motor de inducción en la condición de frenado dinámico.

3. Frenado regenerativo
El frenado regenerativo es una característica inherente de un motor de inducción, ya que funciona como un generador de inducción cuando se extiende a la velocidad por encima de la línea sincrónica y devuelve la energía a la línea de alimentación.
El motor de inducción de tres fases se puede diseñar para funcionar a alta velocidad a la velocidad sincrónica utilizando uno de los siguientes procesos.
- Vaya a un suministro de baja frecuencia en motores de inducción controlados por frecuencia para reducir la velocidad de funcionamiento del lector.
- Movimiento de un mecanismo de elevación cargado como grúas, palenares, excavadoras, etc.
- Vaya a una operación de polo más grande desde un más pequeño en motores de jaula de ardilla múltiple.
En todos los procesos anteriores, el cambio y el par desarrollado se vuelven negativos, como se muestra en la Figura 1.110, y por lo tanto, la máquina actúa como un generador, recibe energía mecánica y la restaurando al sistema de suministro de alimentación en forma de energía eléctrica.
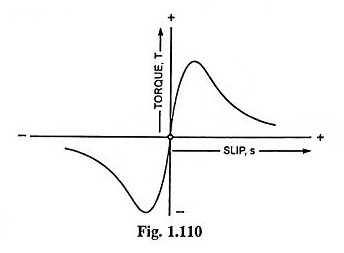
Si la carga causa el motor por encima de la velocidad sincrónica, no se requiere operación de conmutación. Una vez que la máquina se conduce por encima de la velocidad sincrónica, la operación de frenado comienza automáticamente.
El punto de operación dependerá de la amplitud del par de carga y la naturaleza de la característica de la velocidad de torque de la máquina durante la operación de generación.
Al variar la resistencia en el circuito del rotor, es posible funcionar a cualquier velocidad por encima de la velocidad sincrónica durante el frenado.
En el caso de que el par de carga de la carga exceda el par de frenado máximo, cuya máquina es capaz, el sistema se vuelve inestable y la velocidad aumentará aún más, probablemente a un valor desastroso, porque cuanto más funcionará la máquina rápidamente, menos se desarrollará el par de frenado.
En el caso de un motor de inducción de la jaula de la ardilla, se obtiene una velocidad estable a una velocidad considerablemente más alta que la velocidad sincrónica y el frenado regenerativo solo se puede aplicar si el motor está especialmente diseñado para resistir la velocidad excesiva.
El frenado regenerativo tiene la desventaja de la posibilidad de frenar solo a velocidades súper sincrónicas y, en consecuencia, se usa seldome para el frenado.
Este método de frenado eléctrico de los motores de inducción de polifásicos solo se puede usar en el tipo de mecanismo de elevación o con un motor de jaula de ardilla múltiple. También es ventajoso en los ferrocarriles de montaña.
Devuelve alrededor del 20% de la energía total a ciertas carreras ferroviarias y ahorra mucha ropa de zapato de freno.