Fuente cuadrada de la fuente de tensión del inversor nutrido en la inducción del motor:
El lector de motores de inducción nutrido con el inversor de tensión de onda cuadrada es un tipo de convertidor de enlace CC, que es un dispositivo de conversión de dos pasos. Primero se rectifica una dieta de tres fases utilizando un rectificador en el costado de la línea.
El CC rectificado se invierte en AC de la frecuencia deseada por un inversor en el lado de la carga, como se muestra en la Figura 4.22. Cuando la carga no puede proporcionar la potencia reactiva requerida para el inversor, el inversor debe ser necesariamente una fuerza común.
La inductancia en el circuito de enlace CC proporciona suavizado, mientras que la capacidad mantiene la consistencia de la tensión de unión. La tensión de enlace es una cualidad controlada.
El voltaje instantáneo en los terminales de la máquina (en los terminales de salida del inversor) es en cualquier momento directamente proporcional al voltaje de conexión CC (fuente de alimentación CC que es de baja impedancia interna) y la corriente de la máquina (salida) es una función de la entrada de carga.
En consecuencia, la carga ideal para un motor de inducción alimentado con el inversor de la fuente de onda cuadrada, teniendo en cuenta los armónicos en la corriente de carga, debe ser muy inductiva y tener un factor de potencia bajo.

Mediante la conmutación apropiada de los tiristores del inversor, el voltaje del enlace CC se impresiona a través de las fases del motor de inducción alternativamente. La forma de onda de voltaje en los terminales de salida solo depende de esta conmutación y esta conducción de tiristores.
Si los tiristores conducen 180 ° en un período, el voltaje de salida está en forma de una onda cuadrada. En este caso, el control de voltaje se obtiene mediante un rectificador controlado en fase en el lado de la línea.
El voltaje del enlace CC es variable y la forma de onda de voltaje de salida sigue siendo la misma en todas las cargas y frecuencias. El inversor también se llama inversor de onda cuadrada, porque el voltaje de salida es una onda cuadrada.
Estos inversores tienen problemas de conmutación a frecuencias muy bajas, ya que la unión de CC disponible en estas frecuencias no puede cargar suficientes condensadores de comunicación para comunicar tiristores. Esto pone un límite a la frecuencia de operación más baja.
Para extender la frecuencia a cero, se deben usar circuitos de carga especiales. El rango de control de velocidad del inversor de la onda cuadrada en un inversor alimentado con inducción que funciona en un inversor de onda cuadrada es 1: 20.
La polaridad de la tensión del enlace CC no se puede modificar. En consecuencia, durante la regeneración, la dirección de corriente en el circuito de conexión debe revertirse. Se requiere un convertidor de fase separado en el lado de la línea para la regeneración, como se muestra en la Figura 4.22.
El frenado dinámico se puede usar utilizando resistencias conmutadas. El sistema dinámico del sistema no es muy bueno en bajas frecuencias.
El comienzo del motor dulce es posible. Una máquina que funciona con una frecuencia variable, el convertidor de voltaje variable no requiere un equipo inicial adicional.
La máquina funciona normalmente en la parte lineal de la curva de velocidad de par y no ve el par y la corriente bloqueada del rotor en su partida. La máquina tiene características idénticas del punto sincrónico en el punto de par máximo, en cada frecuencia.
El par y la corriente de la máquina pueden mantenerse constantes en esta playa variando la frecuencia y la tensión simultáneamente y suavemente a un par constante y corriente a la velocidad requerida, variando la frecuencia del estator y manteniendo la frecuencia del rotor constante.
La aceleración está en modo controlado de flujo constante. El modo en el que el cambio se mantiene constante y el flujo está controlado (modo de flujo deslizante constante) también es posible para fines iniciales. Estos métodos se suman a la efectividad del lector.
Cuando el cambio se usa como una cantidad controlada para mantener el flujo constante en el motor, el lector se llama lector controlado deslizante.
Al hacer el deslizamiento negativo (es decir, disminuir la frecuencia de salida del inversor), la máquina puede diseñarse para funcionar como un generador y la energía de las partes rotativas se elevó al convertidor de línea adicional o se disipó en una resistencia para el frenado dinámico.
Manteniendo la frecuencia deslizante constante (o un control de control), se puede llevar al frenado a un par constante y una corriente. Por lo tanto, el frenado también es rápido.
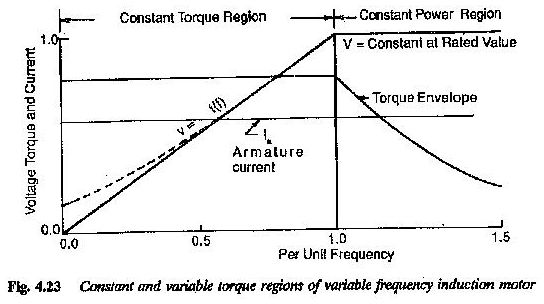
Dado que el voltaje se puede variar para mantener el flujo constante, el funcionamiento constante de torque es posible hasta la frecuencia nominal. Más allá de la frecuencia nominal, el voltaje permanece en su valor nominal y la máquina funciona en modo de flujo.
El motor ofrece una salida constante a todas las velocidades y se llama modo de potencia de caballos constante. Estos modos están representados en la Figura 4.23.
El motor recibe tensiones de onda cuadrada. Esta tensión tiene componentes armónicos. La corriente de refuerzo resultante no es sinusoidal, que tiene picos. Estos picos en realidad deciden la clasificación de diseño del inversor. Los armónicos actuales del estator causan pérdidas y calefacción adicionales.
Por lo tanto, el motor requiere un estrechamiento, o para una potencia dada de un caballo dado, se debe usar un motor de gran tamaño.
Estos armónicos también son responsables de los pulsos de torque. La reacción de los armónicos quinto y séptimo con lo fundamental da a luz a los sextos armónicos desarrollados por la pareja.
Para un inversor de la fuente de onda cuadrada alimentada a un motor de inducción nutrido desde un inversor de onda cuadrada, el contenido armónico de la corriente tiende a permanecer constante independientemente de la frecuencia de entrada, en la playa de las frecuencias operativas del inversor.
El pico y las corrientes armónicas de la línea, así como la corriente del estator, están influenciadas por la reactancia de las fugas del motor. La reactancia de fugas es alta es más pequeña es el contenido armónico y el valor máximo de la corriente del estator.
Por lo tanto, es necesario elegir un motor de inducción con una gran reactancia de fuga para el funcionamiento en un motor de inducción alimentado con la fuente cuadrada de onda cuadrada. Como las corrientes avanzadas son más bajas, la evaluación del diseño del inversor disminuye. El control de bucle abierto es posible, pero puede tener problemas de estabilidad de baja velocidad.
La operación multimotor es posible y la conmutación es independiente de la carga. El convertidor representa una fuente y el motor se puede conectar. En consecuencia, no es necesaria la correspondencia entre el convertidor y la carga.
Como conducir para deslizarse, un motor VSI Fed tiene las siguientes características adicionales:
El control de flujo indirecto se puede obtener mediante control deslizante. Como la cantidad de equilibrio se especifica en el control, el comportamiento dinámico puede no ser satisfactorio. Es posible un control de par preciso sobre una amplia gama de velocidades (a veces cuando se detiene).
Es un lector muy efectivo, que tiene un muy buen factor de eficiencia y potencia, cuando la frecuencia deslizante se limita a la parte lineal de la curva de velocidad del par.
No se requiere equipo inicial y es posible una aceleración muy rápida para el par constante y la corriente. La regeneración o el frenado dinámico también es posible para el torque constante y la corriente. Cuatro lectores de cuadrantes son posibles.
El control de la frecuencia de circuito cerrado proporciona una unidad de velocidad variable con características del motor CC en el sistema Ward Leonard.
Las características de un motor de inducción nutrido al inversor de la fuente de onda cuadrada se pueden resumir de la siguiente manera:
1. Landers impresionaron el voltaje de corriente continua de la amplitud variable.
2.A incluso para el jugador multimotor.
3. El orden es independiente de la carga. El convertidor y la carga no necesitan ser el convertidor representa una fuente a la que se puede conectar el motor.
4. Estas frecuencias de salida del convertidor de corriente de hasta 1500 Hz son posibles. Este disco es muy adecuado para (motores de) operación de alta velocidad. Los discos están disponibles hasta la notación de 200 kVA.
5. La frecuencia de operación más baja limitada por la conmutación es de aproximadamente 5 Hz. El rango de velocidad es 1: 20.
6. No se adapta a la aceleración en la carga y los cambios repentinos de carga.
7. El comportamiento dinámico es bastante bueno a alta velocidad.
8. El frenado dinámico es posible. La regeneración (cuatro operaciones del cuadrante) requiere un convertidor antiparalelo conectado adicional al lado de la línea. La inversión de velocidad se obtiene modificando la secuencia de fase.
9. El voltaje de entrada al motor no es sinusoidal. Esto da como resultado pérdidas adicionales, calefacción y pulsos de par.
10. El motor debe tener una inductancia de fugas lo suficientemente grandes como para limitar las corrientes avanzadas y reducir el contenido armónico THP.
11. El control del abridor de motor es posible, pero puede tener un problema de estabilidad de baja velocidad.
12. El factor de potencia de la línea es pobre debido al control de fase.
13. Se puede operar como un lector controlado deslizante.
14. Encuentra la aplicación como una capacitación industrial para uso general para una potencia baja a promedio.