Accionamiento del motor de inducción alimentado con el inversor inversor:
Lector de motor de inducción alimentado en la fuente de corriente: en un inversor de fuente de voltaje, el motor de inducción alimentado con inducción, el voltaje aplicado al estator es proporcional a la frecuencia, con una corrección para la caída de resistencia del estator, en particular a baja velocidad, para mantener el flujo constante.
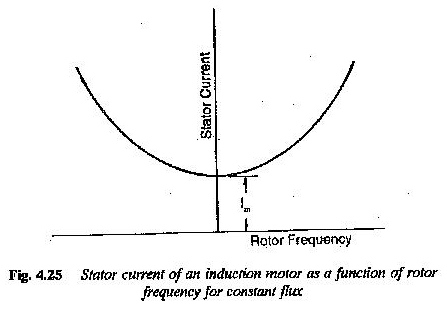
Es un hecho bien conocido que la corriente dibujada por un motor de inducción no depende de la frecuencia del estator cuando el flujo de espacio de aire es constante. Existe una relación fija entre la frecuencia de deslizamiento y la corriente del estator para el flujo nominal en el espacio del aire, como se muestra en la Fig.
4.25. Al controlar el deslizamiento del motor, la corriente del estator se puede verificar. Por lo tanto, el control de flujo indirecto es posible. El control es más simple que el control de voltaje. La curva entre la frecuencia de deslizamiento y la corriente del estator se puede calcular utilizando el circuito equivalente. Se puede verificar un inversor PWM para proporcionar las corrientes deseadas en el motor.
En un convertidor de enlace CC, si se verifica la corriente de conexión CC, el inversor se llama inversor de origen de corriente. La corriente en el enlace CC se mantiene constante por una alta inductancia y se distribuye la capacidad del filtro.
El voltaje de unión de CC variable se convierte en un motor de inducción alimentado al inversor inversor en la fuente de corriente por medio de inductancia. La oferta de DC es de gran impedancia.
Como la corriente de conexión se mantiene constante, la forma de onda de corriente de salida está determinada por el funcionamiento del inversor, mientras que el voltaje de salida está determinado por la naturaleza de la impedancia de carga.
Un motor de inducción alimentado con el inversor actual en el inversor actual es adecuado para cargas que tienen una baja impedancia con corrientes armónicas y tienen una unidad PF
Un motor de inducción alimentado con el inversor del inversor actual tiene una configuración muy simple. No se requieren diodos de retroalimentación. Se utiliza un rectificador controlado en la fase en el lado de la línea para proporcionar el control de corriente.
Como el enlace CC contiene solo inductancia, la regeneración es posible modificando la polaridad de las tensiones y manteniendo la dirección de la corriente. Por lo tanto, un lector de cuatro cuadrantes es simple y simple.
Proporciona una tormenta de amortiguación efectiva de la salida del inversor de las variaciones de voltaje de suministro. El control directo de la corriente del estator permite implementar un control de circuito cerrado preciso con relativa facilidad.
La conmutación del inversor depende de la carga. Los parámetros de carga son parte del circuito de conmutación. Por lo tanto, se requiere una correspondencia entre el inversor y el motor. La operación multimotor no es posible.
El inversor debe ser necesariamente una fuerza común, porque el motor de inducción no puede proporcionar la potencia reactiva del inversor.
La corriente de conexión CC constante puede fluir a través de las fases del motor controlando el inversor y, por lo tanto, la corriente del motor es una onda cuasi-barra. El voltaje del motor es casi sinusoidal con puntos de litera, debido al cambio.
Estos picos de voltaje deciden la evaluación de la tensión de los thvristors y también afectan el aislamiento del motor. Estos puntos pueden ser limitados si la máquina tiene una pequeña reactancia de fuga o si los condensadores de comunicación son grandes.
Una máquina con una reactancia de fuga menor es adecuada para el funcionamiento del motor de inducción del inversor inversor de la fuente de corriente para mantener al menos los picos de voltaje y las pérdidas armónicas. El efecto de las pulsaciones de par disminuye y la frecuencia de funcionamiento se puede aumentar.
La capacidad de conmutación se elige para comprometerse entre las puntas de tensión y la frecuencia de operación más alta. El cambio requiere una corriente mínima final. El inversor tiene la capacidad de recuperarse de una falla de conmutación.
La inductancia de conexión provoca un aumento lento en la corriente de falla y cuando alcanza valores altos, el defecto puede ser eliminado.
El lector plantea problemas de estabilidad en cargas de luz. El funcionamiento del bucle abierto no es posible. Tiene una amplia gama de control de velocidad, pero el rendimiento dinámico es deficiente.
El motor de transmisión requiere estrechamiento debido a pérdidas armónicas y calefacción asociada. Las pulsaciones de torque están presentes y su amplitud es grande a baja frecuencia de operación, debido a los armónicos adicionales en el flujo del rotor. El factor de potencia de línea es deficiente, debido al control de fase.
Hasta la frecuencia nominal, el lector está en modo de torque constante y por encima de la frecuencia nominal que el lector está en modo constante de potencia de caballos.
La corriente del estator de un motor de inducción que funciona con una frecuencia variable, la fuente de alimentación de voltaje variable es independiente de la frecuencia del estator si el flujo de forma de aire se mantiene constante. Sin embargo, depende de la frecuencia del rotor.
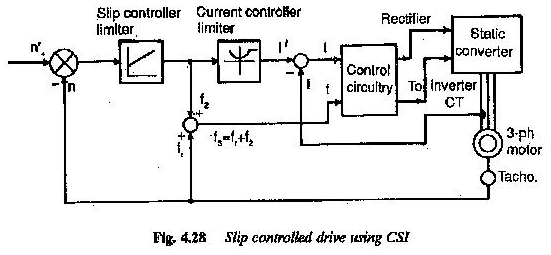
El par desarrollado también depende de la frecuencia del rotor solamente. Usando estas características, se puede desarrollar un lector controlado deslizante (Fig. 4.28) utilizando un inversor de origen de corriente para suministrar un motor de inducción.
La relación entre la frecuencia del rotor y la corriente del estator para el flujo nominal en el Aerogap se introduce en el control. Por lo tanto, el control de flujo indirecto es posible. La salida del generador de funciones proporciona el valor de referencia de la corriente.
La corriente medida se compara con el valor de referencia y el error se usa para modificar el ángulo de disparo del convertidor verificado en el lado de la línea.
La entrada del generador de funciones es la diferencia entre la velocidad de referencia y la velocidad real y se puede considerar como una frecuencia deslizante que se agrega a la frecuencia correspondiente a la velocidad del rotor, que proporciona el valor de la frecuencia del estator y el inversor en el lado de la máquina se controla para dar esta frecuencia.
El control está operativo hasta que el rotor alcanza la velocidad deseada con la frecuencia deslizante requerida.
El lector controlado por Slide presenta las siguientes ventajas:
1. El lector de deslizamiento controlado es muy efectivo.
2. El control de par preciso es posible en un amplio rango de velocidad.
3. La frecuencia deslizante puede ser cualquier valor para el valor correspondiente al par de falla. La operación es un muy buen factor de potencia. La operación es muy estable.
4. El rotor se puede acelerar a un torque constante e informado manteniendo la frecuencia del rotor a un valor apropiado. Aceleración rápida.
5.com que esto conduce al arranque suave que el motor no ve las corrientes del rotor bloqueadas y los resbalones de voltaje asociados no están allí.
6. No son necesarios rotores especiales con un alto par de arranque. Se pueden usar rotores con baja resistencia para que las pérdidas sean limitadas.
7. Se puede incorporar el frenado regenerativo. El frenado a un par constante es posible.
8. El lector tiene una eficiencia comparable a un reproductor de CC tiristorizado.
Las ventajas adicionales de los motores de inducción de la jaula de la ardilla, como la alta relación de potencia / peso, menos mantenimiento, una baja inercia, sin limitación en los rangos de energía y los rangos de velocidad, hacen que el deslizamiento controlara el disco como un competidor real a los lectores de motores DC.
Se pueden usar métodos de eliminación armónica seleccionados o principios PWM para reducir los efectos de los pulsos de par, especialmente a baja velocidad.
En estos métodos, el control se puede obtener controlando la corriente de conexión CC y el principio PWM se puede usar solo para controlar el contenido armónico de la forma de onda actual.
Esta separación de las funciones actuales y de control armónico permite la elección de la estrategia de control PWM, que solo mejorará las pulsaciones de torque del motor y reducirá las pérdidas armónicas.
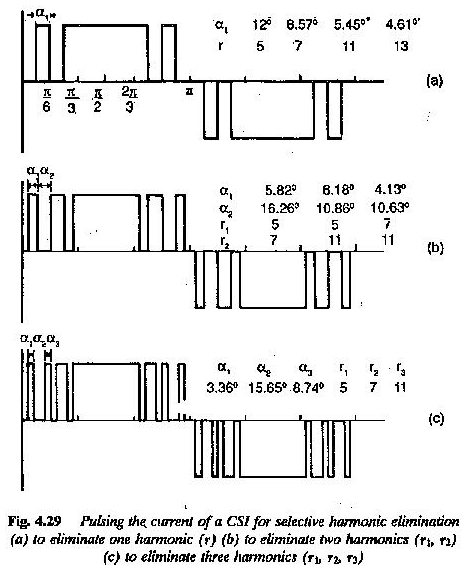
La mayoría de las estrategias PWM para un motor de inducción en el inversor de origen actual se basan en técnicas de eliminación armónica seleccionada.
Se utilizan para eliminar los armónicos del estado de la corriente del estator y los métodos causan la eliminación de las ondas de torque más bajas (Fig. 4.29).
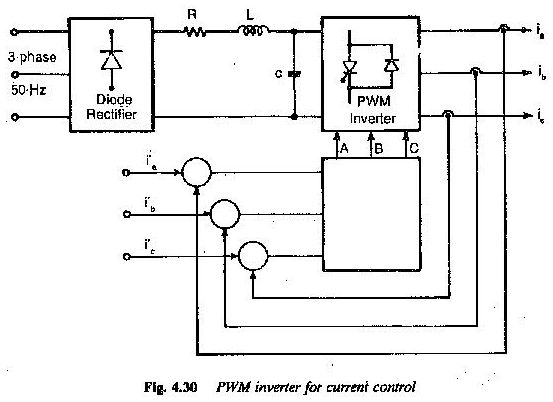
En los últimos años, las estrategias PWM se han desarrollado especialmente para minimizar la ondulación de la velocidad del río debido a la pulsación del par, para causar entrenamiento con rotación suave a baja velocidad (Fig. 4.30).
Las características generales del motor de inducción nutrido con el inversor del inversor actual se pueden resumir de la siguiente manera:
1. Descargue la conmutación dependiente: como los parámetros de carga son parte del circuito de conmutación, el inversor y el motor deben aparecer.
2. El inversor tiene una configuración simple. Los FWD están ausentes.
3. Una operación única del motor
4. El enlace CC contiene solo inductancia. Para mantener una corriente constante, debe ser muy importante. La operación de dos cuadrantes es simple
5. Aumento, se requiere un rectificador controlado en la fase en el costado de la línea. El voltaje de unión de CC variable se convierte en una fuente constante de corriente mediante una alta inductancia de enlace.
6. El inversor es forzoso para dar corrientes de frecuencia variables para alimentar el motor.
7. El valor de capacidad es un compromiso entre los picos de voltaje y la frecuencia de funcionamiento más alta. La capacidad es mayor, la tensión es más pequeña, la frecuencia de funcionamiento más alta también es limitada.
8. La reactancia de las fugas del motor influye en las tensiones armónicas. También es responsable de los picos de voltaje durante la conmutación.
La reactancia de fugas es un parámetro del circuito de conmutación, determina el tiempo de conmutación y, por lo tanto, la frecuencia operativa más alta es limitada.
Un motor debe tener una reactancia de fuga menor para reducir los voltajes armónicos y los picos de voltaje y aumentar el rango de control de velocidad. Los picos influyen en la evaluación del tiristor y afectan el aislamiento. El tamaño del motor se hace más grande si la reactancia de las fugas es pequeña.
9. Los tiristores de calidad del convertidor son suficientes. El uso del tiristor es bueno
10. Los aterrizadores se recuperan de la falla del cambio. La inductancia de conexión provoca un aumento lento en la corriente de falla y cuando alcanza un alto valor, se puede eliminar.
11. Es un problema de estabilidad de carga de luz. Una corriente mínima debe estar allí para cambiar.
12. Las características del bucle operativo no son posibles. La respuesta dinámica es lenta
13. La línea PF es mediocre debido al control de fase.
14. Encuentre la aplicación como promedio a alta capacitación
15.Los pulsos causan oscilaciones de velocidad a velocidades muy bajas. Las estrategias de PWM se utilizan para eliminar las oscilaciones de velocidad y realizar el funcionamiento sin problemas.
16. Esta es el par constante y las operaciones de potencia de los caballos constantes son posibles.