Motores de inducción de tres fases:
Los motores de inducción de tres fases son de dos tipos: la caja de la ardilla y el rotor de las heridas.
En la jaula de la ardilla, el rotor consiste en barras de controlador longitudinales cortocircuitadas por conectores circulares en ambos extremos, mientras que en el motor del rotor de la herida, el rotor también tiene un devanado trifásico equilibrado con el mismo poste que el devanado del estator. Sin embargo, en ambos, el estator usa un devanado distribuido de tres fases.
Análisis y rendimiento:
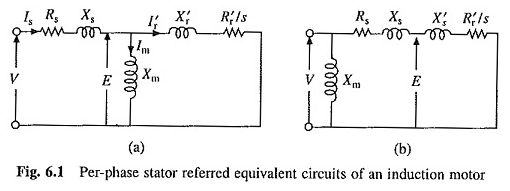
El equivalente del circuito por fase de un motor de inducción de tres fases se representa en la Figura 6.1 (a). R′R y X’R son los valores referidos del estator de la resistencia del rotor RR y la reactancia del rotor XR. El cambio se define por

donde Ωm y ωms son veloces y velocidades sincrónicas, respectivamente. Más

donde F y P son la frecuencia de los alimentos y el número de polos respectivamente.
Dado que la caída del estator en la impedancia es generalmente insignificante en comparación con el voltaje V terminal V, el circuito equivalente se puede simplificar al que se muestra en la Figura 6.1 (b).
También de la ecuación. (6.1)
![]()
En la Figura 6.1 (b),

Potencia transferida al rotor (o potencia de aire)
![]()
La pérdida de cobre del rotor es
![]()
Energía eléctrica convertida en energía mecánica

Torque desarrollado por el motor
![]()
Sustituyendo ecuaciones. (6.3) y (6.7)

Sustituyendo de la ecuación. (6.4) da
Una comparación de ecuaciones. (6.5) y (6.9) sugieren que

El par de salida del motor en el árbol se obtiene deduciendo parejas de deriva de fricción y núcleo de núcleo del par desarrollado.
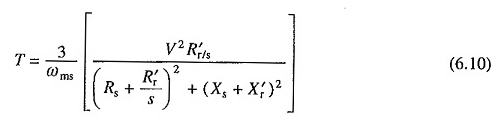
El par desarrollado depende solo del deslizamiento (ecuación (6.10)). La diferenciación de t en (6.10) con respecto a S y asimilado a cero da el cambio para un par máximo 
Sustituyendo de la ecuación. (6.12) en (6.10) da una expresión para el máximo par

El par máximo también se conoce como el torque de falla. Aunque es independiente de la resistencia del rotor, SM es directamente proporcional a la resistencia al rotor.
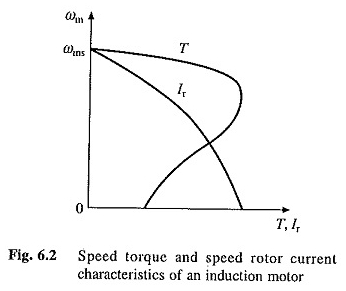
La naturaleza de las características de velocidad y velocidad de velocidad se representan en la Figura 6.2. La corriente de rotor y el torque son cero a velocidad sincrónica. Con una disminución en la velocidad, ambos aumentan.
Mientras que la pareja se redujo después de alcanzar el valor de descomposición, la corriente del rotor continúa aumentando, alcanzando el valor máximo a velocidad cero. La caída en la velocidad de la carga de carga completa depende de la resistencia del rotor.
Cuando la resistencia al rotor es baja, la caída es bastante pequeña y, por lo tanto, el motor funciona principalmente a una velocidad constante. El par de falla es una medida de la capacidad de sobrecarga de torque a corto plazo del motor.
El motor funciona en la dirección del campo rotativo. La dirección del campo rotativo y, por lo tanto, la velocidad del motor se puede revertir invirtiendo la secuencia de fase. La secuencia de fase se puede revertir intercambiando dos terminales del motor.
A veces, el par se expresa en términos de SM y TMAX, lo que no solo facilita los cálculos, sino que también permite una rápida apreciación de la naturaleza de las características de velocidad de velocidad. Divide la ecuación. (6.10) por (6.13) y luego reemplace los rendimientos (6.12)
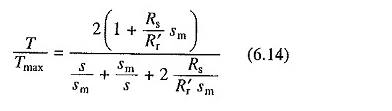
La naturaleza de las características de velocidad de velocidad (Fig. 6.2) ahora puede explicarse fácilmente por la ecuación. (6.14).
Para los cambios mucho más pequeños que SM, domina el segundo término del denominador. Por lo tanto, la relación de velocidad de velocidad de 0 al par nominal está aproximadamente representada por una línea recta.
Para los portaobjetos mucho más grandes que SM, el primer término del denominador domina y la relación de la trama de velocidad toma una forma hiperbólica en esta región.
A lo largo del motor de la operación del motor, el término (RSSM / R’R) es pequeño en comparación con 1 y, en última instancia, dominante en el denominador. Por lo tanto, se puede eliminar de la ecuación. (6.14). Entonces

Motores de inducción con diseños especiales:
Un motor de inducción para uso general está diseñado para operar con diapositivas de baja carga para tener un buen rendimiento de funcionamiento. Según la nota, la carga completa varía de 2 a 7%.
Tal motor tiene una alta corriente de arranque (5-8 veces) y un par de arranque bajo (carga completa a plena carga de carga de boletos). Algunas aplicaciones requieren que el motor se diseñe de manera diferente. Algunos de ellos son:
Motores de inducción de alto nivel:
Para aplicaciones de carga intermitentes, que implican inicio y detener y / u operar frecuentes a baja velocidad para períodos prolongados, los motores de inducción están diseñados con alta resistencia al rotor.
Estos motores tienen una corriente de inicio baja y un alto par de inicio, pero baja eficiencia de carga completa debido a una alta pérdida de cobre de rotor. Debido a que estos motores operan en un gran cambio (entre 10 y 40% a plena carga), se denominan motores deslizantes altos.
Los motores deslizantes altos también son adecuados para el entrenamiento de los ventiladores, donde la velocidad se controla controlando el voltaje del estator y se encuentran entre las dos, la tarta cuadrada y el rotor de la herida. La naturaleza de las características de velocidad de disparo de estos motores se representa en la Figura 6.3 (c).
En los motores de inducción de los casos de ardilla, el buen rendimiento de inicio (corriente de arranque bajo y par de arranque alto) se realiza sin afectar significativamente el rendimiento de carga completa mediante el uso de motores de rotor de barra profunda o en jaula doble.
La frecuencia del rotor va de 50 Hz a 1-3 Hz a medida que la velocidad va desde la parada a plena carga: la variación en la frecuencia del rotor se usa en estos motores para variar la resistencia al rotor de alto valor en la parada a un valor muy pequeño a toda velocidad.
Por lo tanto, aunque se mejora el rendimiento de inicio y de baja velocidad, el rendimiento de carga completa no se realiza significativamente.
Motor de inducción de ardilla adjunta:
El estator de la máquina es idéntico a un motor de inducción para uso general. El rotor tiene barras de conductor profundas y estrechas como se muestra en la Figura 6.3 (a).
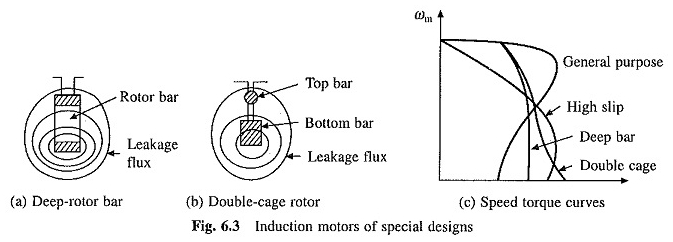
Los flujos de fuga de ranura producidos por la corriente en la barra también se ilustran en la figura. Uno puede imaginar que la barra está hecha de un cierto número de capas estrechas conectadas en paralelo. Comparemos el comportamiento de las capas superior e inferior.
Más enlaces de flujo de fuga con la capa inferior que la capa superior. En consecuencia, la capa inferior tiene una inductancia de fuga mucho mayor que la capa superior. Como la frecuencia del rotor es alta a baja velocidad, la reactancia y la impedancia de la capa inferior son mucho más alta que la capa superior.
En consecuencia, a bajas velocidades, la mayor cantidad de corriente es transportada por la capa más alta y más baja en la parte inferior. Debido a la distribución desigual de la corriente a través de la sección transversal de la barra, una resistencia efectiva del rotor es alta y el rendimiento de inicio y a baja velocidad se mejoran.
A una velocidad de carga casi completa, la frecuencia de la corriente del rotor y la reactancia de fugas es baja. En consecuencia, la corriente también se distribuye a través de la sección transversal de la barra y la resistencia efectiva del rotor tiene un valor bajo. Por lo tanto, el rendimiento de la carga completa no se ve afectado significativamente. La naturaleza de la curva de velocidad del motor se representa en la Figura 6.3 (c).
Motor de inducción del rotor de doble ardilla:
El rotor consta de dos capas de barras del conductor en cada hendidura (Fig. 6.3 (b)) cortocircuitadas por los anillos finales. La barra superior tiene una sección transversal más pequeña que la parte inferior. Por lo tanto, tiene mayor resistencia.
La barra inferior está vinculada a una mayor cantidad de flujos de fuga que la barra superior y, por lo tanto, tiene una mayor inductancia. A baja velocidad, para lo cual la frecuencia del rotor es alta, la barra inferior tiene una impedancia más alta. Por lo tanto, más corriente cruza la barra superior.
Como la resistencia de la barra superior se obtiene del buen rendimiento de inicio. A altas velocidades, para las cuales la frecuencia del rotor es baja, la barra inferior tiene una impedancia mucho menor que la superior.
En consecuencia, la corriente del rotor es transportada principalmente por la barra inferior y el rendimiento de la carga completa sigue siendo buena porque tienen baja resistencia. La naturaleza de las características de la velocidad del engranaje se representa en la Figura 6.3 (c).
Motor de par:
Los motores diseñados para operar durante largos períodos en una condición en una parada o a baja velocidad se llaman motores de torque. Están diseñados para desarrollar el par deseado con baja velocidad a baja velocidad.
Sus características de velocidad tienen la configuración de tener una pendiente negativa para que proporcionen operaciones estables con la mayoría de las cargas de baja velocidad. Pueden ser un tipo de ardilla o rotor de herida. Los motores de inducción de Piphanted y los motores de una sola fase están disponibles.