Principio de operación del motor de inducción:
El principio de funcionamiento del motor de inducción en la Figura 9.4 muestra la vista cruzada de un motor de inducción. El estator funciona con una fuente de alimentación de voltaje V / fase trifásica y frecuencia F Hz. El rotor se enrolla en 3 fases para tantos polos que el estator y el cortocircuito. Se supone que la resistencia del estator y la reactancia de las fugas son insignificantes para
![]()
O
- E1 = EMF inducido por el estator / fase
- KW1 = factor de devanado del estator
- NPH1 (serie) = serie de tourne / fase de Stator
- ΦR = flujo / poste de aire resultante
Se ve desde la ecuación. (9.1) que independientemente de las condiciones de carga existentes en el rotor, φR, el flujo / polo establecido en el aumento de aire es constante, vinculado al voltaje aplicado para la hipótesis realizada.
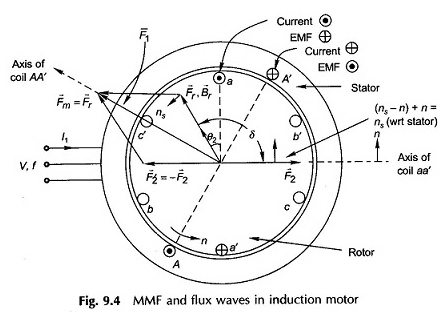
El vector MMF F̅R con el vector de densidad de flujo asociado B̅R que es responsable de la producción de φR se ejecuta a una velocidad sincrónica porque está asociado con 3 corrientes de 3 fases equilibradas dibujadas por el estator.
La velocidad relativa entre B̅R y el rotor provoca la inducción de un patrón de corriente en el rotor cortado.
El par producido por la interacción de B̅R y las corrientes del rotor por la ley de Lenz tenderá a mover el rotor en la dirección de rotación de B̅R para reducir la velocidad relativa.
Por lo tanto, el motor es autodemario y el rotor adquiere una velocidad constante n
La Figura 9.4 muestra la ubicación relativa de los vectores F̅R, B̅R (MMF-GAP de aire y densidad de flujo), F̅2 (Rotor MMF) en el que F̅r conduce F̅2 por el ángulo δ = 90 ° + θ2 (acción del automóvil), θ2 es el ángulo bajo el cual el rotor del rotor del rotor.
Sin embargo, el ángulo θ2 es muy pequeño porque la reactancia del rotor es mucho más pequeña que la resistencia al rotor. El vector del estator MMF se da luego por
![]()
está ubicado en el diagrama vectorial. Mientras se dibuje el diagrama, el estator y la fase del rotor A (representada en forma de una sola bobina) son máximos posibles. El lector puede verificar la ubicación de los vectores desde la fase actual A que aplica la regla correcta.
Deslizamiento y frecuencia de las corrientes del rotor:
En referencia a la Figura 9.4, se observa fácilmente que B̅R se mueve a la velocidad (ns – n) con respecto a los controladores de rotor (en la dirección de B̅R). Esto se conoce como velocidad deslizante. El cambio se define como

Obviamente s = 1 para n = 0, es decir para el rotor estacionario y s = 0 para n = ns, es decir, para el rotor que funciona a una velocidad sincrónica.
La frecuencia de las corrientes inducidas en el rotor es
El grito normal con carga completa del principio de funcionamiento del motor de inducción es de alrededor del 2% al 8%, por lo que la frecuencia de las corrientes del rotor es tan baja como 1 a 4 Hz.
El rotor por fase EMF en s = 1 (rotor de cambio) está dado por
![]()
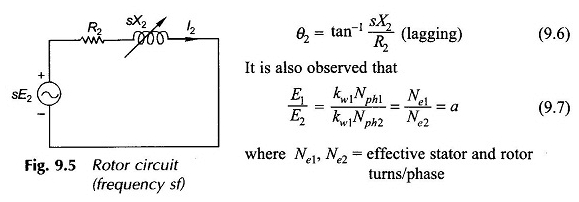
En cualquier cambio, la frecuencia del rotor es SF, el EMF induce por el rotor se transforma en SE2. Ahora considere la impedancia del circuito del rotor
![]()
O
- X2 = reactancia del rotor del rotor cuando se detiene (frecuencia del rotor = frecuencia del estator, f)
Cuando el rotor opera en Slip S, su frecuencia es SF, su impedancia se transforma en
![]()
Por lo tanto, se encuentra que la frecuencia de las corrientes del rotor, su FEM inducida y su reactancia varían en proporción directa al cambio. La figura 9.5 muestra el circuito del rotor con deslizamiento s. El ángulo de fase de circuito es
Producción de MMF y torque del rotor:
En la Figura 9.4 como el vector de densidad de flujo que resulta en la densidad de flujo funciona a velocidad (ns – n) con respecto al rotor, se induce un EMF positivo máximo en la bobina del rotor AA ‘(indicado por DOT en el controlador A y cruza en el conductor A’) cuando B̅R está a 90 ° frente a la declive.
Dado que la corriente en el rotor está rezagada detrás de la EMF de θ2, la corriente en la bobina aa ‘será máxima positiva cuando B̅r ha avanzado aún más por el ángulo θ2. Es en este momento que el vector MMF del rotor F̅2 estará a lo largo del eje de la bobina AA ‘.
Por lo tanto, se ve que B̅r (o F̅r) está en un ángulo δ = (90 + θ2) antes de F̅2. Además, F̅2 causado por las corrientes del rotor de frecuencia F2 = SF funciona en comparación con el controlador del rotor a velocidad (NS – N) y a la velocidad NS.
Con respecto al estator porque el rotor en sí se mueve en la misma dirección a la velocidad n en comparación con el estator.
Por lo tanto, F̅r y F̅2 se mueven a una velocidad sincrónica NS en comparación con el estator y están estacionarios con respecto a los demás con F̅R ubicado frente a F̅2 por ángulo (90 ° + θ2).
La interacción del campo del rotor y el campo resultante crean un par en la dirección de rotación de F̅r.
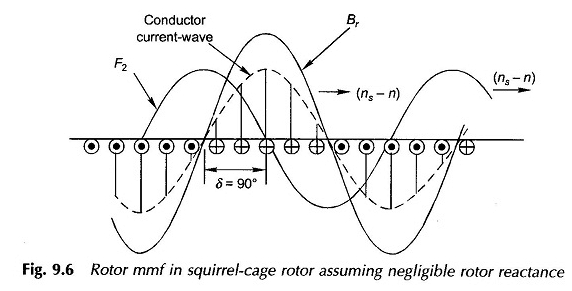
Ahora considere el caso del rotor de ardilla con conductores extendidos uniformemente alrededor de la periferia del rotor. La reacción del rotor MMF F2 se visualiza mejor a partir del diagrama desarrollado de la FIG.
9.6 en el que se imagina que el rotor es estacionario y la onda marrón, en comparación con él a la velocidad deslizante (NS – N). Que la reactancia del rotor se considera insignificante para que las corrientes del conductor (cortocircuitadas) estén en línea con el controlador de EMF.
Por lo tanto, el patrón actual del conductor se disipa sinusoidalmente y está en la fase espacial con breve y se mueve sincrónicamente con él. La onda MMF del rotor es una sinusoidal almacenada con el mismo número de polos que el movimiento de la onda cruda con ella.
Su fundamental (F2) representa en la Figura 9.6 las leyes del BR alegan en 90 °. Si la reactancia del rotor ahora está escenificada, la onda de corriente del conductor y, por lo tanto, la onda MMF del rotor sería tarde por ángulo θ2.
Por lo tanto, el ángulo entre la onda BR y F2 sería (90 ° + θ2), lo mismo que en el rotor de la herida.
Por lo tanto, un rotor de la caga de la ardilla reacciona de la misma manera que un rotor de la herida, excepto que el número de fases no es obvio: puede considerarse que tiene tantas fases como las barras / polos. Un rotor de jaula de ardilla siempre puede ser reemplazado por un rotor de heridas equivalente con tres fases.
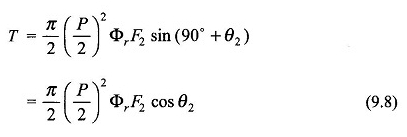
Se ve desde la ecuación. (9.8) que un rotor de baja reacción (débil θ2 = Tan-1 JSX2 / R2) generará una pareja más grande para φR, F2 y S dada.
Un motor de ardilla de la jaula es más alto a este respecto en comparación con un motor del rotor de la herida porque el rotor de la jaula tiene una reactancia más baja porque no tiene un sobresalto de devanado.
Una observación muy importante que se puede hacer en principio de operar el motor de inducción aquí es que, aunque las corrientes del rotor tienen una frecuencia SF, el MMF (F2) causado por ellos funciona a una velocidad sincrónica en comparación con el estator.
En otras palabras, la reacción de las corrientes del rotor corresponde a las corrientes de frecuencia (f) del estator que fluye en una estructura cilíndrica estacionaria equivalente colocada dentro del estator en lugar del rotor.
O, para poner de otra manera, las vistas de las corrientes del rotor del estator tienen la frecuencia F pero tienen el mismo valor RMS.
El vector MMF Stator F̅1 se encuentra en la Figura 9.4 de la ecuación del vector
![]()
Además, F̅1 se puede dividir en componentes como
![]()
donde f̅2 está en oposición a f̅2 y igual a la magnitud y
![]()
La corriente del estator que causa f̅1 puede, correspondiente al vector EQ. (9.10), dividirse en componentes
![]()
Aquí, I̅M puede reconocerse como una corriente de magnetización del archivo que causa el MMF FR resultante y el flujo / polo resultante, φR, mientras que el componente de la corriente del estator que equilibra la reacción F2 de la corriente del rotor i2.
La Figura 9.4 también muestra la ubicación relativa de la bobina del estator AA y la dirección positiva de la corriente. Esta imagen vectorial instantánea se mantiene cuando I2 tiene un valor positivo máximo.
Para que F’2 cancele F2, el componente de corriente del estator que equilibra el rotor MMF debe estar en línea con la corriente del rotor como se muestra en el estator.

En términos de amplitudes, F’2 se dirige opuesto a F2, de modo que cancelen mientras que I’2 e I2 deben obedecer la proporcionalidad de la ecuación. (9.13) y debe estar en fase.
Además, por referencia a la Figura 9.4, podemos ver fácilmente que en el estator, la dirección positiva del EMF E1 se opone a la dirección positiva de I1, mientras que en el rotor, la dirección positiva de I2 está en la dirección positiva de SE2. Esto es similar al caso del transformador.
Con la dirección de una corriente positiva en la bobina del estator AA ‘marcada como en la Figura 9.4 y la dirección del eje del coloquio indicada, la ley de inducción que dará un fomio positivo en oposición a la corriente IS

Este principio de funcionamiento del motor de inducción tiene el mismo signo que el utilizado en la carcasa del transformador para que la fase de flujo φR y la corriente de magnetización que lo crean a finales de 90 °. En el modelo de circuito, la IM sería dibujada por la reactancia de magnetización XM a través de E1.