Principio de motor de inducción | Característica deslizante de par:
El principio del motor de inducción no se ha introducido hasta ahora. Considere una máquina de rotor cilíndrica con el estator y la herida del rotor para tres fases y el número idéntico de polos como se muestra en la Figura 5.40.
Supongamos inicialmente que el rotor del rotor está en el circuito abierto y dejemos que el estator esté conectado a un bus infinito (V, F).
Las corrientes del estator instalaron un campo magnético giratorio en el espacio de aire que funciona a una velocidad sincrónica que induce un EMF en el devanado del estator que equilibra el voltaje del terminal suponiendo que la resistencia del estator y la reactancia de las fugas son negligibles.
El campo rotativo también induce EMF en el devanado del rotor, pero no circula la corriente del rotor porque el rotor está en el circuito abierto. La frecuencia de los EMF del rotor es, por supuesto, f. Dado que el rotor MMF F2 = 0, no se desarrolla ninguna pareja y el rotor continúa estacionado.
El principio del motor de inducción actúa simplemente como un transformador donde el estator (primario) y el rotor (secundario) tienen EMF de la misma frecuencia que son inducidas por el flujo magnético rotativo en lugar de por un flujo que varía en el tiempo como en un transformador ordinario.
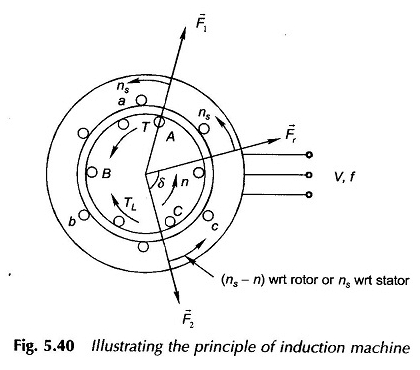 Que el rotor ahora se mantiene estacionaria (bloqueado desde la rotación) y el devanado del rotor está cortocircuitado. El rotor ahora lleva corrientes de corriente que crean el MMF F2 girando en la misma dirección y con la misma velocidad que el campo del estator. F2 circula las corrientes de reacción en el estator desde la barra de bus (al igual que en un transformador ordinario), por lo que el flujo / polo φR del flujo de densidad de flujo resultante (girar en el aire de excursión a la velocidad sincrónica) induce un estator EMF para equilibrar el voltaje del terminal. Obviamente, φR debe ser el mismo que cuando el rotor estaba en el circuito abierto. De hecho, φR permanecerá constante independientemente de las condiciones de funcionamiento creadas por la carga en el motor. La interacción de φR y F2, que son estacionarias entre sí, crea la pareja que tiende a mover el rotor en la dirección de FR o el campo del estator F1. El motor de inducción es, por lo tanto, un dispositivo de autopista tan diferente del motor sincrónico.
Que el rotor ahora se mantiene estacionaria (bloqueado desde la rotación) y el devanado del rotor está cortocircuitado. El rotor ahora lleva corrientes de corriente que crean el MMF F2 girando en la misma dirección y con la misma velocidad que el campo del estator. F2 circula las corrientes de reacción en el estator desde la barra de bus (al igual que en un transformador ordinario), por lo que el flujo / polo φR del flujo de densidad de flujo resultante (girar en el aire de excursión a la velocidad sincrónica) induce un estator EMF para equilibrar el voltaje del terminal. Obviamente, φR debe ser el mismo que cuando el rotor estaba en el circuito abierto. De hecho, φR permanecerá constante independientemente de las condiciones de funcionamiento creadas por la carga en el motor. La interacción de φR y F2, que son estacionarias entre sí, crea la pareja que tiende a mover el rotor en la dirección de FR o el campo del estator F1. El motor de inducción es, por lo tanto, un dispositivo de autopista tan diferente del motor sincrónico.
Deje que el cortocircuito del rotor ahora pueda girar. Funciona hacia el campo del estator y adquiere una velocidad constante de n. Obviamente, n 
Deslice la velocidad de la unidad S (en comparación con la velocidad sincrónica) a la que el rotor se desliza detrás del campo del estator. La frecuencia del rotor F2 = SF se llama frecuencia deslizante. De la ecuación. (5.66), la velocidad del rotor es
![]()
Las corrientes de frecuencia de borrador en el devanado del rotor causan un campo de rotor del rotor en relación con el rotor en la misma dirección que el campo del estator a una velocidad de

Dado que el rotor funciona a una velocidad n y el campo del rotor en (ns – n) en comparación con el rotor en la misma dirección, la velocidad neta del campo del rotor visto desde el estator (referencia al suelo) es
![]()
Es decir, lo mismo que el campo del estator. Por lo tanto, el campo de reacción F2 del rotor siempre es estacionario en comparación con el campo del estator F1 o el campo FR resultante (con flujo φR por polo). Dado que el rotor MMF F2 es proporcional a la corriente del rotor I2 y que el flujo / polo resultante φR está fijo por el voltaje terminal independiente de las condiciones de funcionamiento, el par del motor de inducción viene dado por (ver ecuación (5.58))))))))))))))))))))))))))))))
![]()
Observamos aquí que el torque es producido por el motor de inducción a cualquier velocidad mecánica que no sea sincrónica; Esa pareja se llama la pareja asíncrona.
El ángulo δ por el cual F2 es tarde en FR, se debe conocer el MMF resultante. Antes de proceder a determinar δ, debe tenerse en cuenta que el cortocircuito del devanado del rotor es equivalente a cortocircuitar todos los impulsores de un devanado individual.
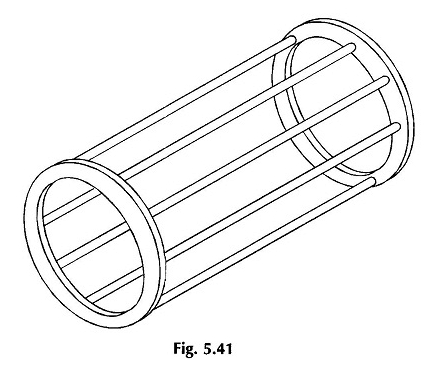
En consecuencia, el rotor no necesariamente debe ser enrollado correctamente; Se puede construir para realizar barras colocadas en rotor y ranuras cortadas haciendo anillos finales en cada lado del rotor.
Tal rotor se llama rotor de la jaula ardilla; La jaula conductora se ilustra por separado en la Figura 5.41. El rotor de la jaula de ardilla tiene una construcción barata y robusta y se adopta en una gran mayoría de aplicaciones de motores de inducción.
El principio del motor de inducción con un rotor enrollado correctamente se llama motor de inducción del rotor de la herida y se suministra con tres anillos deslizantes que proporcionan la instalación para agregar una resistencia externa al devanado del rotor antes de eliminarlos. Estos motores se utilizan en situaciones de carga a cargo.
Normalmente, el deslizamiento de carga completa de un motor de inducción de la ardilla es de 3 a 10%pequeño. En consecuencia, la impedancia del rotor es principalmente resistiva, la reactancia del ajuste del rotor es proporcional a F2 = SF es insignificante. Además, el EMF induce por el rotor es proporcional al deslizamiento del rotor porque φR se fija y gira a la velocidad NS – N = SNS en comparación con el rotor.
Como resultado, la corriente del rotor está casi en línea con la EMF del rotor y proporcional al deslizamiento del rotor. Esta conclusión obviamente se aplicaría a los controladores de rotor individuales también.
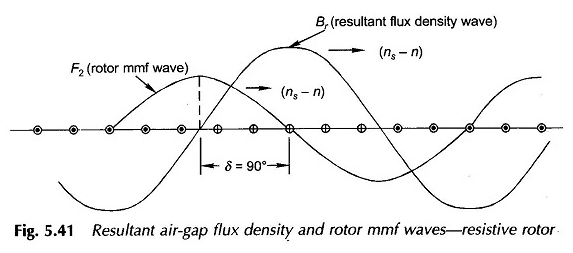
La Figura 5.42 muestra la onda de densidad de flujo de cepillado resistente residente frente a los controladores de rotor a la velocidad (NS – N) = SNS en un diagrama desarrollado.
Las corrientes inducidas en los controladores de rotor cortos se distribuyen movimientos de distribución sinusoidalmente a velocidad (NS-N) en comparación con el rotor en sincronismo con el BR. Más, porque se supone que los conductores de rotor deben ser resumidos, es decir
Las corrientes en ellos están en línea con sus respectivos EMF, la distribución de la corriente del rotor está en la fase espacial con WAVE. La distribución de la corriente del rotor sinusoidal produce una onda del rotor F2 sinusoidal del rotor que está a 90 ° detrás de la distribución de la corriente del rotor o 90 ° detrás de la onda bruta.
Por lo tanto, se concluye que para pequeños valores deslizantes, el ángulo δ en el motor de inducción es de 90 °. Entonces,

Dado que el rotor EMF es linealmente proporcional al deslizamiento, la corriente del rotor también es principalmente un rotor resistente a pequeños valores deslizantes. En consecuencia, el par desarrollado en el motor de inducción es una función cada vez más lineal del cambio para un pequeño valor deslizante, siendo cero para S = 0, es decir a una velocidad sincrónica.
A medida que el cambio aumenta aún más, la reactancia de las fugas del rotor ya no se puede pasar por alto. Su valor de deslizamiento es SX2, donde x2 es la reactancia de las fugas del rotor por fase en la frecuencia F, es decir cuando el rotor está en un estancamiento. La corriente del rotor ahora se retrasa detrás del EMF induce

donde R2 es resistencia al rotor por fase.
Dado que las corrientes en los controladores del rotor arrastran la EMF inducida por el ángulo θ, la distribución de la corriente del controlador del rotor y, por lo tanto, el rotor MMF F2 se mueve hacia la izquierda en la Figura 5.40 por un ángulo θ, de modo que
![]()
Esto significa sin Δ <1. Además, dado que la impedancia del rotor aumenta con S, la corriente del rotor está lejos de ser proporcional al cambio. Estos dos factores causan el paso del par motor a través de un valor máximo, luego comienzan a disminuir gradualmente a medida que S aumenta constantemente.
La naturaleza de la característica completa del cambio de par en el motor de inducción se presenta en la Figura 5.43. El par máximo se conoce como el par de ruptura. El motor descansaría si se cargara más allá de un corto período de tiempo con una carga de torque mayor que el valor de la falla.
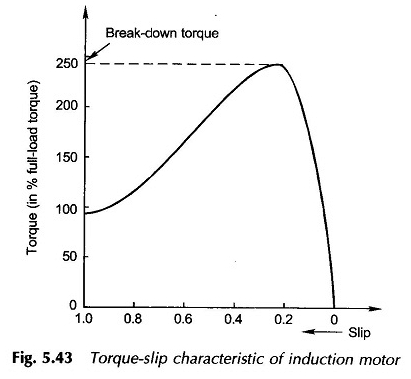
Como ya se mencionó, el deslizamiento de un motor de inducción es del 3 al 10% a plena carga. En consecuencia, es significativamente una unidad de velocidad constante a diferencia del motor sincrónico que funciona a una velocidad constante independiente de la carga.
La generación de los resultados de la acción si un principio de motor de inducción se ejecuta a un cambio negativo o a una velocidad n> ns, es decir, a una velocidad por encima de la sincrónica.