Freinage de l’entraînement à moteur à induction:
Les méthodes suivantes sont utilisées pour le freinage de l’entraînement à moteur à induction:
- Freinage régénératif
- Branche de tension de bouchage ou inversé
Freinage dynamique (ou rhéostatique) catégorisé comme:
- freinage dynamique AC
- freinage auto-excité à l’aide de condensateurs
- freinage dynamique DC
- freinage de séquence zéro
Freinage régénératif:
L’entrée d’alimentation d’un moteur à induction est donnée par
![]()
où φs est l’angle de phase entre la tension de phase du stator V et le courant de phase du stator est. Pour le fonctionnement de l’automobile φs <90 °. Si la vitesse du rotor devient supérieure à la vitesse synchrone, la vitesse relative entre les conducteurs de rotor et le champ rotatif à air-rotation s’inverse.
Cela inverse l’EMF induit par le rotor, le courant du rotor et la composante du courant du stator qui équilibre les virages de l’ampère du rotor. Par conséquent, l’angle φs devient supérieur à 90 ° et le flux de puissance s’inverse, donnant un freinage régénératif.
Le courant de magnétisation requis pour produire un flux d’air-gap est obtenu à partir de la source. Les équations (6.1) – (6.13) sont applicables, sauf que le glissement est négatif. La nature de la caractéristique de vitesse-Torque est représentée sur la figure 6.13.
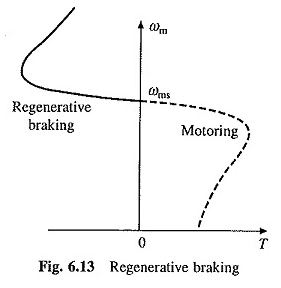
Lorsqu’elle est alimentée par une source de fréquence fixe, le freinage régénératif n’est possible que pour des vitesses supérieures à la vitesse synchrone. Avec une source de fréquence variable, il peut également être obtenu pour des vitesses inférieures à la vitesse synchrone.
Lorsque le freinage régénératif est utilisé pour maintenir la vitesse du moteur contre une charge active, un fonctionnement stable est généralement possible entre la vitesse synchrone et la vitesse pour laquelle le couple de freinage est maximum.
L’avantage principal du freinage régénératif est que la puissance générée est utilement utilisée et les principaux inconvénients étant que lorsqu’ils sont alimentés à partir d’une source de fréquence constante, il ne peut pas être utilisé sous une vitesse synchrone.
L’utilisation (ou l’absorption) de la puissance régénérée se produit de la même manière que celle expliqué précédemment pour le freinage régénératif des moteurs à courant continu.
Branche de tension de bouchage ou d’inverse:
Lorsque la séquence de phases de l’alimentation du moteur fonctionnant à une vitesse est inversée, en échangeant des connexions de deux phases du stator par rapport aux bornes d’alimentation, le fonctionnement passe de la automobile à la bouchage comme le montre la figure 6.14.
Les caractéristiques de branchement sont en fait une extension des caractéristiques de automobile pour la séquence de phases négative du quadrant III à II. L’inversion de la séquence de phases inverse la direction du champ rotatif. Si le glissement pour le bouchage est indiqué par SN, alors

Les performances du moteur peuvent être calculées à partir des équations. (6.4) – (6.10) Lorsque S est remplacé par Sn ou (2 – S). Étant donné qu’au moment de la commutation en bouchage, le glissement peut être jusqu’à 2, la tension induite par le rotor peut être deux fois de sa valeur à zéro vitesse.
Par conséquent, le courant du moteur est important, bien que le couple de freinage soit faible. En cas de moteurs de plaie rotor, une résistance égale à deux fois, la résistance au démarreur est insérée dans le rotor pour limiter le courant de freinage à la valeur de démarrage. Cela augmente également le couple de freinage comme le montre la courbe 2 (Fig. 6.14).
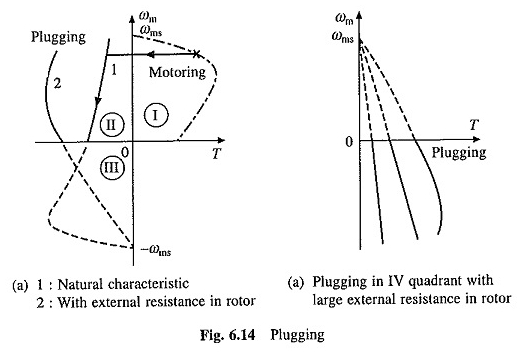
Comme le montre la figure 6.14, le couple n’est pas nul à zéro vitesse. Lorsqu’il est utilisé pour l’arrêt du moteur, il est nécessaire que le moteur soit déconnecté de l’alimentation à une vitesse ou près de zéro.
Cela rend nécessaire d’utiliser un dispositif supplémentaire pour détecter la vitesse zéro et la déconnexion du moteur de l’alimentation. Ce freinage de conduite à moteur à induction convient pour inverser le moteur.
Comme le moteur est déjà connecté pour le fonctionnement en direction inverse et que le couple n’est pas nul à zéro ou à toute autre vitesse, le moteur décélère en douceur puis accélère dans le sens inverse.
Un cas particulier de bouchage se produit lorsqu’un moteur d’induction connecté à des tensions de séquence positive est entraîné par une charge active dans le sens inverse (quadrant IV). La grue est une de ces applications.
Une grande résistance au rotor est utilisée afin que les caractéristiques aient une pente négative, et donc, le lecteur est stable à l’état d’équilibre (Fig. 6.14 (b)).
Dans cette méthode, l’énergie mécanique fournie au rotor, soit par charge active, soit par énergie cinétique stockée dans l’inertie du moteur et de la charge, est convertie en énergie électrique et gaspillée dans une résistance au rotor. Une énergie supplémentaire est tirée de la source et gaspillée dans une résistance au rotor.
Lorsqu’il est freiné sous aucune charge à partir de vitesse synchrone, la quantité totale d’énergie dissipée dans la résistance au rotor est donnée par (3/2) jΩ2ms (Eq. (6,63), ce qui est trois fois l’énergie stockée dans l’inertie. Ainsi, une énergie supplémentaire égale à Jω2MS est tirée de la source.