Freinage du moteur à induction:
Les trois types de freinage du moteur à induction, à savoir le freinage régénératif, dynamique et à contre-courant peuvent également être accomplis avec des moteurs à induction.
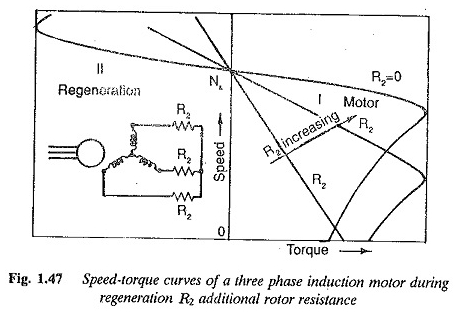
Freinage régénératif
Lorsque le rotor d’un moteur à induction fonctionne plus rapidement que le champ du stator, le glissement devient négatif et la machine génère de la puissance. Par conséquent, chaque fois que le moteur a tendance à fonctionner plus vite que le champ rotatif, le freinage régénératif se produit et le KE
des pièces rotatives sont retournées dans le secteur. La courbe de vitesse-Torque s’étend au deuxième quadrant (Fig. 1.47). La vitesse du moteur diminue. Le couple de freinage fait fonctionner le moteur à vitesse constante, arrêtant sa tendance à tourner plus rapidement.
En raison des effets de la résistance au stator, le couple maximal développé pendant la régénération est supérieur au couple maximal pendant la manche. Dans les palans et les grues, le moteur d’entraînement a tendance à fonctionner plus vite que la vitesse synchrone.
Cette situation se produit lorsque le palan soulève une cage vide. En raison du contrepoids, l’affaire peut acquérir des vitesses dangereuses. La transition a lieu presque automatiquement et un couple est développé pour arrêter l’accélération et la régénération.
Ce type de fonctionnement est également possible lorsque la charge révise le moteur pendant la descente de la charge. La régénération automatique arrête une accélération excessive. Le contrôle de la résistance au rotor peut être utilisé pour obtenir un meilleur couple de freinage.
Le freinage régénératif est également possible avec un moteur à changement de poteau lorsque la vitesse est passée de haute à basse. Il peut également être accompli dans un lecteur de fréquence variable.
En diminuant momentanément la fréquence du moteur, la vitesse synchrone diminue et les conditions favorables à la régénération ont lieu.
Pendant le freinage régénératif, il existe une possibilité de vitesses dangereuses si le point de fonctionnement pendant le freinage tombe dans la partie instable de la caractéristique. Cela se produit si le couple de charge est supérieur au couple de panne du moteur.
Le couple développé ne peut pas freiner le moteur et l’accélération excessive a lieu. Cette possibilité peut être éliminée au moyen d’une haute résistance dans le rotor.
Freinage dynamique
Le freinage dynamique est utilisé pour freiner un lecteur non inversant. Le stator est transféré du secteur AC vers des plats principaux (Fig. 1.48 (a)). Le DC traversant le stator installe un champ stationnaire. Cela induit des courants de rotor qui produisent un couple pour ramener le rotor rapidement.
Le couple s’est développé et le retard pendant le freinage peut être contrôlé par la quantité de puissance DC. Des résistances supplémentaires R1 et R2E dans les circuits du stator et du rotor contrôlent respectivement les couples d’excitation et de freinage DC.

Le circuit équivalent et le diagramme de phaseur du moteur pendant le freinage dynamique sont représentés sur la figure 1.48 (c). Lorsque le stator est alimenté à partir de DC, le MMF produit est stationnaire. Ce MMF dépend des connexions du stator pour l’alimentation DC, le nombre de tours et le courant.
Les connexions possibles du stator pour l’alimentation DC sont représentées sur la figure 1.49. Le courant équivalent CC peut être déterminé en assimilant les MMF produits par ce courant équivalent et le courant CA.
Le courant primaire équivalent est responsable de la magnétisation et du courant secondaire du couple. Le couple est donné par

où S est un glissement.
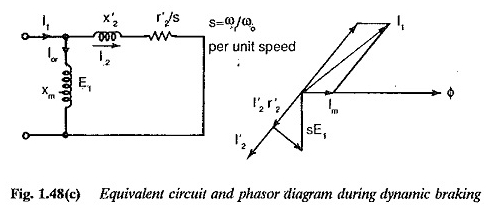
Du circuit équivalent que nous avons

Aussi, à partir du diagramme de phaseur, nous avons
![]()
à partir de laquelle MI peut être déterminé. La valeur de XM est donnée par
![]()
Le couple est

La courbe de glissement de couple peut être déterminée en utilisant cette expression. Le couple maximal se produit à un glissement

Et le couple de freinage maximal est

La caractéristique peut également être dessinée en utilisant la relation

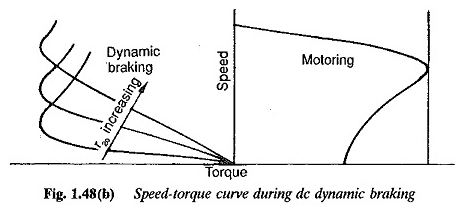
Le couple de freinage est proportionnel à I21. Cependant, la saturation joue son propre rôle et il y a une épuisement du couple. L’effet de R′2 est similaire aux effets pendant la conduite, c’est-à-dire
Il ne modifie pas la valeur de TMB, mais modifie la valeur de la vitesse à laquelle le TMB se produit. Les courbes de vitesse de vitesse typiques sont représentées sur la figure 1.48.
Les valeurs de I1 et R′2 sont contrôlées pour fournir le freinage souhaité. Le premier est limité par R1. Cette méthode est généralement appliquée pour freiner les moteurs entraînant des charges actives. Le freinage dynamique est utilisé conjointement avec un contrôle automatique. Le freinage du moteur à induction est plus populaire dans les palans que le moteur à courant continu, en raison de cette fonctionnalité.
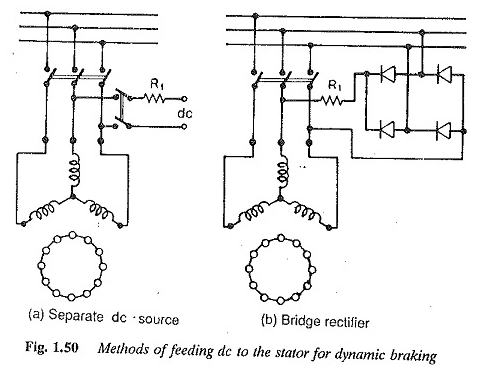
Les méthodes d’alimentation d’une alimentation en courant continu du stator sont représentées sur la Fig, 1.50. Il peut être fourni par une alimentation CC à l’aide d’une résistance limite R1 dans le circuit pour contrôler l’excitation DC. Le contrôle du couple est obtenu par variation de résistance au rotor.
Alternativement, une alimentation CA peut être rectifiée au moyen d’un redresseur de diode et le DC résultant peut être transféré au moteur.
Dans le freinage dynamique AC, le stator est passé à une banque de capacité. La machine fonctionne en tant que générateur d’induction excitée auto. Toute l’énergie mécanique est dissipée sous forme d’énergie électrique dans la résistance au rotor. Cette méthode n’est pas rentable, en raison du coût des condensateurs.
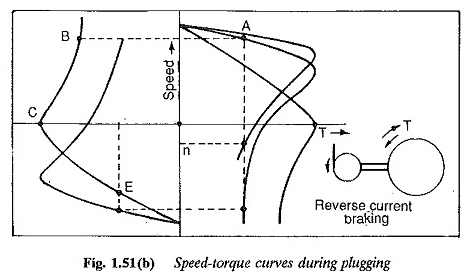
Contre-freinage à courant
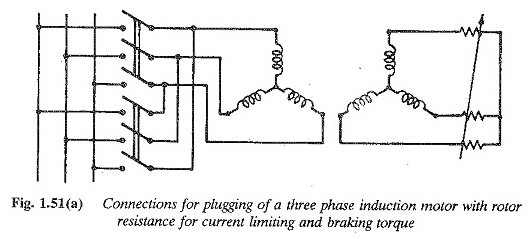
En modifiant la séquence de phase de l’entrée en un freinage du moteur d’induction, la direction du champ du stator peut être inversée. En pratique, cela se fait en échangeant l’alimentation à deux bornes du moteur (Fig. 1.51 (a)).
Un couple de freinage est développé et le moteur se repost très rapidement. Le moteur doit être éteint du secteur lorsque la vitesse zéro est approchée. Sinon, le couple développé accélère le moteur dans le sens inverse. Cette méthode est également appelée bouchage.
Lorsque le moteur est bouché, la tension induite E dans l’armature et la tension appliquée V s’aident mutuellement et le courant pendant le freinage est causé par E + V.
Cela peut entraîner des courants très élevés, qui sont limités par la résistance élevée au rotor, et augmentent également efficacement le couple de freinage.
La courbe de vitesse-couple d’un freinage du moteur à induction peut être modifiée en faisant varier la résistance au rotor. Le point de couple maximal peut être fait pour se produire dans la plage des glissements 1-2, où le couple développé a tendance à freiner le rotor.
Ce couple peut également être utilisé pour arrêter la tendance du rotor à accélérer pour une raison ou l’autre (par exemple, la révision du moteur ou un palan augmentant la cage vide).
Une résistance élevée est introduite dans le rotor, de sorte que le point de fonctionnement se déplace vers le quatrième quadrant. Le couple de freinage développé empêche toute accélération du rotor et le rotor fonctionne à une vitesse uniforme (Fig. 1.51 (b)).
Si le moteur fonctionne à un glissement A au moment du bouchage, le couple de freinage total est la somme du couple de branchement à (2 – s) et le couple de chargement

Le TP peut être contrôlé par une résistance à rotor variable qui limite le courant de freinage.