Frein dynamique du moteur à induction (ou freinage rhéostatique):
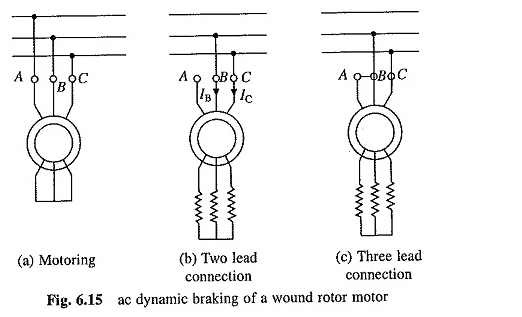
(a) Frein dynamique AC – Le freinage dynamique AC du moteur d’induction est obtenu lorsque le moteur est exécuté sur une alimentation monophasée en déconnectant une phase de la source et en le laissant ouvert (Fig. 6.15 (b)) ou en le connectant avec une autre phase de machine (Fig. 6.15 (c)).
Les deux connexions des Fig. 6.15 (b) et (c) sont respectivement appelés connexions de deux et trois plombs. Lorsqu’il est connecté à une alimentation en 1 phase, le moteur peut être considéré comme alimenté par une séquence positive et négative en trois phases de tensions.
Le couple net produit par la machine est une somme de couples due aux tensions de séquence positive et négative. Lorsque le rotor a une résistance élevée, le couple net est négatif et un fonctionnement de freinage est obtenu. L’analyse du moteur pour deux et trois connexions de plomb est effectuée comme suit:
Deux connexions de plomb: supposons que la phase A d’un moteur connecté en y est en circuit ouvert. Alors ia = 0 et ic = -ib. Par conséquent, les composants de séquence positifs et négatifs IP et dans, respectivement, sont donnés par

où α est donné par l’équation. (6.17).
Comme les composants de séquence positifs et négatifs sont égaux et opposés, deux circuits équivalents peuvent être connectés dans l’opposition en série. La tension à appliquer à cette combinaison de série sera

Avec une tension appliquée JVBC / √3 Si le courant est ip = – in = jib / √3, il s’ensuit qu’avec une tension de phase appliquée v, le courant serait IB / √3. Le circuit équivalent peut donc être dessiné comme le montre la figure 6.16 (a).
Bien que les valeurs des composantes de séquence positive et négative du courant soient égales, les couples correspondants ne le sont pas. La nature des courbes de vitesse de vitesse pour les courants de séquence positive et négative et le couple net sont représentés sur la figure 6.16 (b).
Par choix approprié de résistance au rotor, le couple de freinage peut être obtenu dans toute la plage de vitesse. Comme la résistance au rotor requise est grande, le freinage dynamique AC du moteur d’induction ne peut être utilisé que dans les moteurs à rotor de plaie.
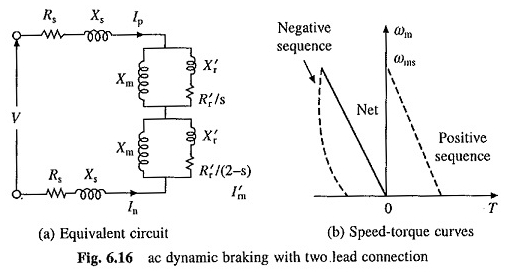
À cet égard à des vitesses élevées (ou à de faibles valeurs de glissement), l’impédance de la partie de composante de séquence positive devient très élevée. Étant donné que les composantes de séquence positive et négative du courant doivent être égales, le couple de freinage net est petit et, par conséquent, le freinage n’est pas très efficace.
Connexion à trois plombs: Ici, deux phases de l’enroulement du moteur connecté en Y sont connectées en parallèle en série avec la troisième phase (Fig. 6.15 (c)). Laissez les phases A et B

Contrairement à deux connexions de plomb, la magnitude des composantes de séquence positive et négative de la tension est égale et non les composantes de séquence positive et négative des courants. Le circuit équivalent est illustré à la figure 6.17.
Les parties de séquence positive et négative du circuit sont indépendantes, et par conséquent, aucune restriction n’est imposée à la composante de séquence négative du courant par une partie de séquence positive du circuit équivalent.
Ainsi, des couples de freinage plus élevés sont obtenus (par rapport à deux connexions de plomb) à des vitesses élevées. La nature de la caractéristique de la vitesse-couple avec cette connexion est la même que celle de la figure 616 (b).
Toute inégalité entre les résistances de contact dans les connexions de deux phases en parallèle réduit le couple de freinage et peut même conduire à un couple de automobile, car la condition tend davantage à deux connexions de plomb avec une résistance croissante dans l’une des deux phases (comme la résistance au rotor utilisée est inférieure à la connexion à deux plomb).
Par conséquent, la connexion à deux plomb est généralement préférée malgré son couple faible. L’application principale du freinage CA monophasé est en hauteur de grue.
(b) freinage auto-excité à l’aide de condensateurs: dans cette méthode, trois condensateurs sont maintenus en permanence connectés à travers les bornes du moteur. Les valeurs des condensateurs sont ainsi choisies que lorsqu’elles sont déconnectées de la ligne, le moteur fonctionne comme un générateur d’induction auto-excité.
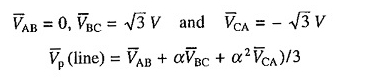
La connexion de freinage est représentée sur la figure 6.18 (a) et le processus d’auto-excitation est expliqué sur la figure 6.18 (b) pour aucune condition de charge. La courbe A n’est pas une courbe de magnétisation de charge de la machine à une vitesse donnée, et la ligne B représente le courant à travers des condensateurs, donné par
![]()
où E est la tension induite par le stator par phase.
Les condensateurs fournissent le courant réactif nécessaire pour l’excitation. L’opération se produit au point C qui est l’intersection de deux caractéristiques. Lorsque la vitesse tombe, la valeur de E pour le même courant de magnétisation tombe et que la nouvelle caractéristique de magnétisation a est obtenue.
D’un autre côté, la pente de la caractéristique E contre IC augmente en donnant une nouvelle caractéristique b. L’intersection de deux courbes se produit maintenant à c. Ainsi, la réduction de la vitesse tout en déplace les courbes de magnétisation vers le bas, la pente de la tension des condensateurs vs la courbe de courant augmente.
À une certaine vitesse critique, qui est généralement élevée, deux courbes ne se croisent pas et la machine ne s’auto-excite pas et le couple de freinage tombe à zéro. La caractéristique de la vitesse-couple sous freinage auto-excité est représentée sur la figure 6.18 (c).
Parfois, des résistances externes sont connectées sur les bornes du stator pour augmenter le couple de freinage et pour dissiper une certaine énergie générée à l’extérieur de la machine. La construction de la figure 6.18 (b) n’est valable que pour aucune opération de charge.
Pour une analyse plus précise, les baisses d’impédance motrice doivent être prises en compte. Ce schéma est rarement utilisé, car le couple de freinage tombe à zéro à une vitesse qui est généralement élevée.
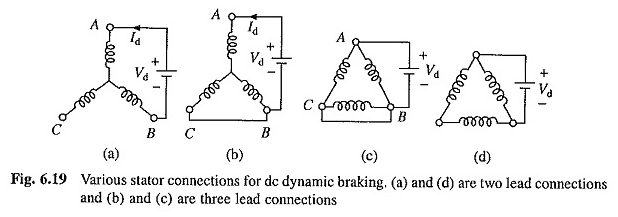
(c) Frein dynamique CC: il est obtenu lorsque le stator d’un moteur à induction fonctionnant à une vitesse est connecté à une alimentation en courant continu. Deux connexions couramment utilisées, deux et trois plomb, pour les statistiques des connexions étoiles et delta sont représentées sur la figure 6.19.
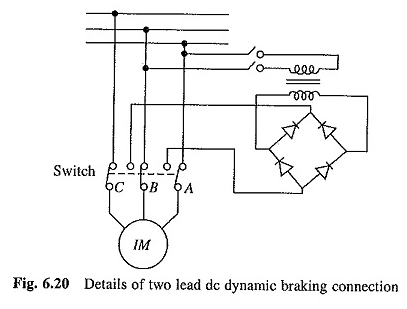
Une méthode pour obtenir l’alimentation DC à l’aide d’un pont de diode pour deux connexions de plomb est illustrée à la figure 6.20.
Le courant CC traversant le stator produit un champ magnétique stationnaire. Le mouvement du rotor dans ce champ induit une tension dans l’enroulement du rotor. La machine fonctionne donc comme un générateur.
L’énergie générée est dissipée dans la résistance au circuit du rotor, donnant ainsi un freinage dynamique du moteur d’induction.
Comme le champ est stationnaire, la vitesse relative entre les conducteurs de rotor et le champ est maintenant ωm. La fréquence de tension induite sera égale à la fréquence de la tension de la source CA (ou de la fréquence du moteur nominal) lorsque ωm = ωms.
Soit la tension induite dans le rotor lors de la course à une vitesse synchrone. Lorsqu’il fonctionne à une vitesse ωm, la tension induite et sa fréquence seront respectivement SER et SF. Alors

Cela donne un circuit équivalent en phase de la figure 6.21 (a) pour le rotor. La division de toutes les quantités par S produira un circuit équivalent à la fréquence nominale.
En référence à divers paramètres de circuit équivalent, ainsi obtenu aux tours de stator, donne un circuit équivalent en phase du rotor illustré sur la figure 6.21 (b). Le circuit équivalent du stator sous le freinage dynamique DC du moteur d’induction est illustré à la figure 6.21 (c).
Afin de combiner avec un circuit équivalent de rotor de la figure 6.21 (b), nous devons d’abord obtenir un circuit équivalent par phase du stator à la fréquence nominale. Circuit équivalent Fig. 6.21 (c) suggère que le stator MMF est constant et indépendant de la vitesse.
Nous imaginons donc que le stator soit alimenté par une source de courant équilibrée triphasée de fréquence nominale, donnant un courant de phase. Le courant CA est équivalent à ID à condition qu’il produit du stator MMF de même amplitude que l’ID de courant CC.
Ainsi, nous remplaçons un MMF stator stationnaire produit par ID de courant CC par un MMF (produit par IS) d’amplitude identique mais tournante à vitesse synchrone.
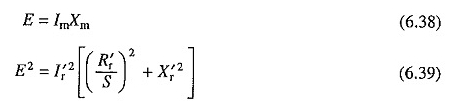
La différence de ces deux MMF sera un MMF à Air-Gap qui sera responsable de la production de flux d’air-GAP qui, à son tour, provoque la tension de la fréquence nominale induite dans le stator. Le circuit équivalent en phase du stator à la fréquence nominale prend ainsi la forme illustrée à la figure 6.21 (d).
Combinant des circuits équivalents des Fig. 6.21 (6) et (d) et le retrait du transformateur donne une fréquence nominale par circuit équivalent en phase (Fig. 6.21 (e)).

I′r est petit pour les petits s, et par conséquent, les approches IM l’est. En raison d’une grande valeur de la messagerie instantanée, le circuit magnétique est saturé. Ainsi, XM n’est pas constant mais varie avec IM. Pour une analyse précise, la variation de XM avec IM doit être prise en compte.
La relation entre IS et ID dépend de la connexion du stator. Par exemple, le dérivons pour les deux connexions de plomb de la figure 6.19 (a). Ici ia = id et ib = – id.
Si N est un nombre efficace de virages dans chaque enroulement, le MMF maximal produit par la phase A sera IDN et le MMF maximal produit par la phase B sera (-IDN). En supposant que ces MMF soient distribués sinusoïdalement dans l’espace, le pic du MMF résultant sera
Lorsque la machine est alimentée par une source de courant triphasée équilibrée, le pic du stator MMF est

Est équivalent à id lorsque f = f ‘. Par conséquent, à partir des équations. (6.35) et (6.36)
![]()
Les valeurs de sont pour d’autres connexions (fig. 6.19 (b), (c) et (d), respectivement) sont:
![]()
La caractéristique de vitesse-Torque est calculée comme suit.
À partir du circuit équivalent de la figure 6.21 (e)
Considérez la distribution des courants entre les branches parallèles formées par XM et le rotor

Soustraction de l’équation. (6.39) à partir de (6,40) rendements

De l’équation (6.39)

Le couple du moteur est

Puisque XM est fonction de l’IM, Eqs. (6.38) – (6.42) sont des équations algébriques non linéaires. L’utilisation des étapes suivantes évite le besoin d’une solution numérique. Supposons une valeur de IM, obtenez E correspondant à partir de la caractéristique de magnétisation, calculez XM à partir de l’équation.
(6.38), obtenir i’r à partir de (6.41), calculer S à partir de (6.42) puis ωm et t à partir des équations. (6.34) et (6.43), respectivement.
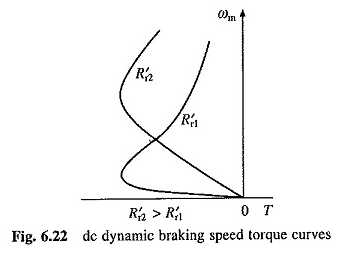
La figure 6.22 montre la nature des courbes de couple de vitesse pour deux valeurs de résistance au rotor. Dans un moteur à cage d’écureuil ou un moteur à rotor de plaie sans résistance externe dans le rotor, le couple maximal se produit à basse vitesse.
Alors que le couple maximal est indépendant de la résistance au rotor, la vitesse à laquelle le couple maximal se produit augmente avec la résistance au rotor. Lorsque Fig.
6.22 DC Dynamic Braking of Induction Motor Speed Couple Courbes Le freinage rapide est nécessaire, une résistance sensationnelle est connectée dans le circuit du rotor et il est coupé à mesure que la vitesse tombe.
Lorsqu’il est utilisé pour maintenir une charge active, comme dans Mine Winders, une grande résistance est connectée pour obtenir des courbes de vitesse-couple avec une pente négative, afin d’assurer une stabilité à l’état d’équilibre.
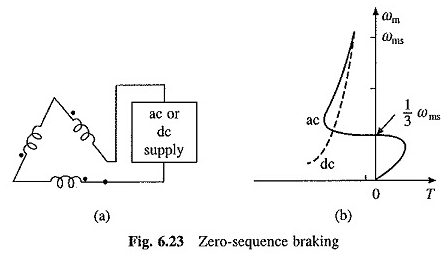
(d) Free de séquence zéro: Dans ce freinage, trois phases de stator sont connectées en série à travers un AC monophasé ou une source CC comme le montre la figure 6.23 (a). Une telle connexion est connue comme une connexion de séquence nulle, car les courants dans tous les enroulements du stator sont co-phasaux.
Le MMF provoqué par des courants co-phasaux (ou à séquence zéro) produit un champ magnétique ayant trois fois le nombre de pôles pour lesquels la machine est réellement enroulée. Avec une alimentation en AC, le champ résultant est stationnaire dans l’espace et passe à la fréquence de l’alimentation.
Avec l’alimentation DCE, le champ résultant est stationnaire dans l’espace et est d’une ampleur constante. Un avantage important de cette connexion est la charge uniforme de toutes les phases du stator. La nature des courbes de vitesse de vitesse pour l’alimentation AC et CC est illustrée à la figure 6.23 (b).
Avec l’approvisionnement en courant alternatif, le freinage ne peut être utilisé que jusqu’à un tiers de la vitesse synchrone. Cependant, les couples de freinage produits par cette connexion sont considérablement plus importants que l’automobile. Le moteur fonctionne essentiellement dans le freinage régénératif.
Pour les moteurs à faible résistance au rotor, une partie importante de l’énergie générée est récupérée. Contrairement au freinage dynamique AC du moteur à induction, il ne nécessite pas de grande résistance au rotor et peut donc être utilisé à la fois – avec des moteurs d’écureuil et des moteurs rotons.
Avec l’alimentation en DE, le freinage est disponible dans toute la gamme de vitesse. C’est essentiellement un freinage dynamique car toute l’énergie générée est gaspillée dans les résistances du rotor.
L’agencement de commutation, du fonctionnement triphasé à zéro normal, est extrêmement simple lorsque le moteur a un stator connecté delta.