Méthode de départ du moteur à induction:
Les processus transitoires impliqués dans la méthode de démarrage du moteur d’induction dans un entraînement à vitesse variable nécessitent une étude détaillée. Le moteur électrique et la charge connectée accélèrent à la vitesse nominale du repos sous l’influence du couple de départ.
L’opération transitoire pendant est satisfaisante si un couple de départ suffisamment bon est développé avec une valeur réduite de courant de démarrage, pour accélérer le rotor dans le temps souhaité.
La nécessité de limiter le courant de démarrage se produit en raison de baisses lourdes de la tension du moteur après les pics de départ du courant.
L’équipement de démarrage utilisé doit être capable de minimiser ces creux de la tension à une valeur tolérable, de sorte que les autres équipements du réseau ne sont pas affectés.
Le courant de départ affecte également le moteur. Les courants de démarrage élevés chauffent le rotor. Si le démarrage est fréquent, le chauffage doit être réduit ou limité. Dans les machines DC, les courants de démarrage élevés produisent des étincelles aux brosses. Pour une bonne commutation, les courants de départ doivent être limités.
Dans le fonctionnement du convertisseur, des harmoniques supplémentaires du courant affectent la commutation. Ces problèmes de commutation dans les moteurs à courant continu dus à l’ondulation peuvent être résolus en augmentant (correctement) le nombre d’impulsions du convertisseur de puissance et en modifiant la conception du moteur lui-même, par exemple, plastiquant les interpoles.
Le couple de départ doit produire une accélération uniforme. Le temps d’accélération doit être réduit en vue d’améliorer la productivité et de réduire l’énergie perdue pendant le démarrage.
Le but de démarrer l’équipement dans un moteur électrique est de limiter le courant de départ et de fournir un couple de départ raisonnablement bon, si possible, afin que le moteur accélère dans la période souhaitée à la vitesse nominale.
Pour les moteurs à courant continu, le courant de départ est limité en utilisant une résistance supplémentaire en série avec l’armature. Le moteur est allumé avec un champ complet. Ceci est effectivement réduit le démarrage de la tension.
Les convertisseurs de puissance du thyristor utilisés pour le contrôle de la vitesse peuvent également être utilisés dans le but de démarrer, car la tension est en douceur et les pertes de démarrage sont absentes.
La méthode de démarrage du moteur à induction a les méthodes suivantes:
- Démarrage directement en ligne
- Démarrage basse tension
- Résistance au rotor Démarrage
- Démarrage de basse fréquence
- Construction spéciale du rotor.
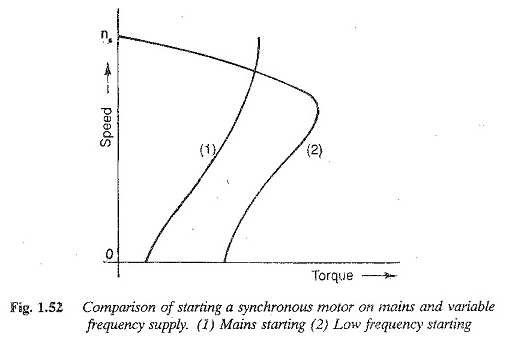
Les moteurs synchrones ne sont pas autonomes, mais sont lancés par un moteur auxiliaire ou en utilisant le principe du moteur d’induction. Les enroulements d’amortisseur sont utilisés comme enroulements de démarrage. Pour faire un auto-auto-synchrone, un rotor de plaie est employé.
Il est court-circuité avec une résistance supplémentaire pendant le démarrage et nourri à partir d’un CC lorsqu’il est accéléré à une vitesse synchrone. Un moteur synchrone peut également être démarré à l’aide d’un système d’onduleur de fréquence variable. Une comparaison de la fréquence variable commençant par le démarrage du secteur est donnée sur la figure 1.52.
Relations énergétiques pendant le démarrage:
Afin de sélectionner un équipement de départ approprié, par exemple le rhéostat de départ dans un moteur de shunt, il devient nécessaire de déterminer la perte d’énergie pendant le démarrage.
1.La perte d’énergie pendant le démarrage est le Ke des pièces rotatives à vitesse finale. La même énergie est tirée de l’alimentation. Par conséquent, l’énergie électrique totale tirée de l’alimentation pendant le démarrage est
![]()
où
- ωs est la vitesse finale à l’abri.
Lorsqu’il a commencé contre une charge de couple tl, la perte totale dans le circuit d’armature est 
où ωl est la vitesse avec la charge TL et TLF est la perte d’énergie due au couple de charge et est donnée par 
Dans le cas des moteurs de la série DC, la perte d’énergie dépend de r et est donnée par

2. Dans le cas d’une méthode de démarrage de moteur d’induction, une résistance supplémentaire du rotor est utilisée. La perte d’énergie dans la résistance au rotor est le Ke des pièces rotatives. Une partie de l’énergie est également dissipée dans la résistance du stator. L’énergie totale perdue pendant le démarrage est

Une augmentation de la résistance au rotor diminue la perte d’énergie dans la résistance du stator, alors qu’elle n’affecte pas la perte de la résistance au rotor elle-même. Cela diminue le temps d’accélération.
Lorsque le moteur est démarré sur charge, la perte dissipée est supérieure à celle de contre-charge et est donnée par

où TD et TL sont des fonctions de glissement. L’intégration de ΔWSL à partir de 0-ωS donne la perte d’énergie totale. Lorsque les moteurs à cage d’écureuil sont démarrés directement à partir de la ligne, il y a une dissipation d’énergie minimale car le couple développé est grand avec une tension complète.
Avec un démarrage à basse tension, le TD diminue et l’énergie gaspillée augmente, même si le courant de démarrage diminue. Cela peut être attribué à l’augmentation du temps d’accélération à un démarrage basse tension.
Dans les moteurs de cage d’écureuil, toute l’énergie est perdue dans la machine elle-même, tandis que dans les rotors des anneaux de glissement, une résistance externe peut être utilisée pour la dissipation de l’énergie, minimisant ainsi la chaleur du moteur mais augmentant l’heure de début.
Dynamique de démarrage du moteur électrique:
Le début du moteur électrique est normalement effectué avec des résistances graduées qui sont coupées lentement à mesure que le moteur accélère. Le classement est basé sur deux limites entre lesquelles le courant de démarrage peut varier. La dynamique pendant le démarrage peut être nécessaire pour découvrir réellement les valeurs de ces résistances.
DC Shunt Motor:
Lorsqu’un moteur de shunt est accéléré sous charge, les équations sont 
En utilisant ces relations que nous avons

où
- ω0 est la vitesse de non-chargement
- ωl est la chute de vitesse sous charge
- TM est la constante de temps mécanique.
Si le moteur est accéléré de ω1 à ω2, la solution de cette équation peut être obtenue comme
![]()
Si l’accélération est de zéro à ω0, nous avons
![]()
Au début, le courant chute à mesure que le moteur accélère, en raison de la construction de l’EMF arrière. Le courant d’armature tombe de façon exponentielle comme ![]()
où i1 est le courant de départ et il la valeur finale. Si l’accélération est à l’abri
![]()
Le temps d’accélération peut être déterminé à l’aide de ces relations. Si un démarreur à plusieurs étapes est utilisé, le temps pris pour que le courant passe de I1 à I2 est 
La constante de temps mécanique est différente à différentes étapes et est donnée par
La valeur d’EX est obtenue en utilisant la valeur de la vitesse, qui augmente de façon exponentielle. Enfin, le temps d’accélération total

Moteur à induction:
Nous pouvons analyser les conditions transitoires dans un moteur à induction triphasé en vue de déterminer le temps d’accélération. Il est bien connu qu’en ajustant correctement la résistance au rotor, un couple maximal peut être fait au démarrage.
Mais l’analyse montre que cela ne donne pas le temps minimum d’accélération, qui est obtenu si la résistance au rotor est sélectionnée de telle sorte que le couple maximum se produit à un glissement de 0,407.
Le couple développé à n’importe quel glissement est donné par

En supposant que l’accélération se déroule à l’abri, le couple développé accélère le rotor

De plus, nous supposons que la vitesse de non-charge est une vitesse synchrone. En utilisant les équations ci-dessus que nous avons

former qui

où tm = jωs ∕ tdm est la constante de temps mécanique du moteur. Le moteur commence du repos et s’étend jusqu’à une vitesse à vide. Le glissement varie de 1 à l’art. Intégration de l’équation. 1,82 entre ces limites, nous avons

Si le glissement final est supposé être S = 0,03, l’heure de début TST est

La valeur minimale de TST est obtenue par

ce qui donne SM = 0,407. Le rapport TST ∕ TM en fonction de SM est représenté sur la figure 1.51 pour accélérer le rotor dans le temps que le couple effectif est 
Cela montre à nouveau que l’heure de début est un minimum si le couple de départ est de 0,81 TDM. Cela se produit à nouveau si TDM se produit à SM = 0,407.
Une méthode de départ de moteur à induction peut être faite pour accélérer en un minimum de temps si le couple de départ est de 0,81 fois le couple maximum et le couple maximum se produit à SM = 0,407.