Modèle de circuit approximatif d’un moteur à induction:
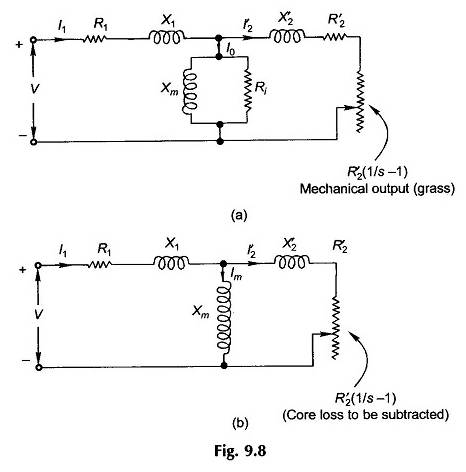
Un modèle de circuit approximatif d’un moteur à induction, qui entraîne une facilité de calcul considérable dans l’analyse, est obtenu en décalant la branche shunt sur la figure 9.8 (a) aux bornes d’entrée comme le montre la figure 9.9.
Cette étape n’est pas aussi facilement justifiée que dans un transformateur en raison de l’amplitude relative du courant excitant (également appelé courant de magnétisation) qui, en raison de la présence de l’air-gap, peut atteindre 30 à 50% du courant à charge complète.
De plus, la réactance de fuite primaire est également nécessairement plus élevée dans un moteur d’induction par rapport à un transformateur et donc ignorer la chute de tension de la réactance primaire n’est pas tout à fait justifiée.
Il est donc souligné ici que les résultats obtenus par ce modèle sont considérablement moins précis que ceux obtenus à partir des modèles de la figure 9.8 (a) et (b).
Les paramètres des modèles de moteur à induction tels que présentés ci-dessus sont obtenus à partir de tests à non-chargement et à rotor bloqué.
On voit facilement de la figure 9.9 qu’en raison de la branche de shunt magnétisante qui tire le courant I0 à près de 90 ° à la traîne, la PF où le moteur fonctionne à pleine charge est faible d’environ 0,8. À la charge légère (petite i′2), le facteur de puissance de la machine est beaucoup plus bas. Il s’agit du problème inhérent du moteur à induction en raison de la présence de l’air-gap dans le circuit magnétique et du fait que le courant d’excitation doit être tiré du secteur (côté stator). 