Moteurs à induction triphasé:
Les moteurs à induction triphasé sont de deux types: la case d’écureuil et le rotor des plaies.
Dans l’écureuil-cage, le rotor se compose de barres de conducteur longitudinales court-circuités par des connecteurs circulaires aux deux extrémités tandis que dans le moteur du rotor de la plaie, le rotor a également un enroulement réparti triphasé équilibré ayant le même poteau que l’enroulement du stator. Cependant, dans les deux, le stator porte un enroulement distribué à trois phases.
Analyse et performance:
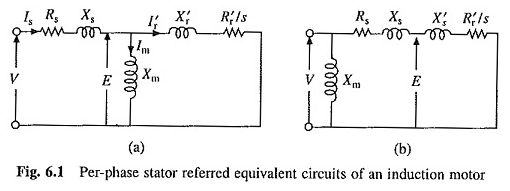
Le circuit équivalent par phase d’un moteur à induction triphasé est représenté sur la figure 6.1 (a). R′R et X′R sont les valeurs référées du stator de la résistance du rotor RR et la réactance du rotor xr. Le glissement est défini par

où ωm et ωms sont des vitesses de rotor et synchrones, respectivement. Plus loin

où F et P sont respectivement la fréquence d’alimentation et le nombre de pôles.
Étant donné que la chute d’impédance du stator est généralement négligeable par rapport à la tension terminale V, le circuit équivalent peut être simplifié à celui montré sur la figure 6.1 (b).
Également de l’équation. (6.1)
![]()
De la figure 6.1 (b),

Puissance transférée au rotor (ou puissance d’air)
![]()
La perte de cuivre du rotor est
![]()
Puissance électrique convertie en puissance mécanique

Couple développé par moteur
![]()
Substituant des équations. (6.3) et (6.7)

Se substituant à partir de l’équation. (6.4) donne
Une comparaison des équations. (6.5) et (6.9) suggèrent que

Le couple de sortie du moteur à l’arbre est obtenu en déduisant les couples de dérive de friction et de core-core à partir du couple développé.
Le couple développé est fonction du glissement uniquement (Eq. (6.10)). La différenciation de T dans (6.10) par rapport à S et assimiler à zéro donne le glissement pour un couple maximal 
Se substituant à partir de l’équation. (6.12) en (6.10) donne une expression pour un couple maximal

Le couple maximal est également connu sous le nom de couple de panne. Bien qu’il soit indépendant de la résistance au rotor, SM est directement proportionnel à la résistance au rotor.
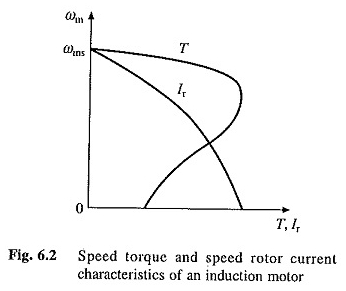
Les natures des caractéristiques de courant de vitesse et de vitesse de vitesse sont représentées sur la figure 6.2. Le rotor-courant et le couple sont zéro à vitesse synchrone. Avec une diminution de la vitesse, les deux augmentent.
Alors que le couple réduit après avoir atteint la valeur de panne, le courant du rotor continue d’augmenter, atteignant une valeur maximale à zéro vitesse. La baisse de la vitesse de la charge à pleine charge dépend de la résistance au rotor.
Lorsque la résistance au rotor est faible, la goutte est assez petite et, par conséquent, le moteur fonctionne essentiellement à une vitesse constante. Le couple de panne est une mesure de la capacité de surcharge de couple à court terme du moteur.
Le moteur fonctionne en direction du champ rotatif. Direction du champ rotatif, et par conséquent, la vitesse du moteur peut être inversée en inversant la séquence de phase. La séquence de phases peut être inversée en échangeant deux bornes du moteur.
Parfois, le couple est exprimé en termes de SM et de Tmax, qui non seulement facilite les calculs, mais permet également une appréciation rapide de la nature des caractéristiques de vitesse-couple. Diviser l’équation. (6.10) par (6.13) puis remplacer les rendements (6.12)
La nature des caractéristiques de vitesse-couple (Fig. 6.2) peut désormais être facilement expliquée de l’équation. (6.14).
Pour les glissements beaucoup plus petits que SM, le deuxième terme du dénominateur domine. Par conséquent, la relation de vitesse de vitesse de 0 au couple nominal est approximativement représentée par une ligne droite.
Pour les glissements beaucoup plus grands que SM, le premier terme du dénominateur domine et la relation de vitesse-couple prend une forme hyperbolique dans cette région.
Dans toute la région du fonctionnement du moteur, le terme (RSSM / R′R) est petit par rapport à 1 et à terme dominant dans le dénominateur. Par conséquent, il peut être supprimé de l’équation. (6.14). Ainsi

Moteurs à induction avec designs spéciaux:
Un moteur à induction à usage général est conçu pour fonctionner à faible glissement à pleine charge afin d’avoir de bonnes performances de course. Selon la note, le glissement à pleine charge varie de 2 à 7%.
Un tel moteur a un courant de démarrage élevé (5-8 fois) et un couple de démarrage faible (couple de charge à pleine charge à deux fois le couple de charge de billets). Certaines applications nécessitent que le moteur soit conçu différemment. Certains d’entre eux sont:
Moteurs à induction à glissement élevé:
Pour les applications de charge intermittente, impliquant un démarrage et un arrêt et / ou fonctionner fréquents à basse vitesse pendant des périodes prolongées, les moteurs à induction sont conçus avec une résistance élevée au rotor.
Ces moteurs ont un faible courant de départ et un couple de démarrage élevé, mais une faible efficacité pleine charge en raison d’une perte de cuivre rotor élevée. Parce que ces moteurs fonctionnent à un grand glissement (entre 10 et 40% à pleine charge), ils sont appelés moteurs à glissement élevé.
Les moteurs à glissement élevé conviennent également aux entraînements des ventilateurs où la vitesse est contrôlée par le contrôle de la tension du stator et se trouvent entre les deux – carré-cage et rotor de plaie. La nature des caractéristiques de vitesse-couple de ces moteurs est représentée sur la figure 6.3 (c).
Dans les moteurs à induction des cas d’écureuil, de bonnes performances de départ (courant de démarrage faible et couple de démarrage élevé) est réalisé sans affecter sensiblement les performances de charge complète par l’utilisation de moteurs de rotor de barre profonde ou de rotor à double cage.
La fréquence du rotor passe de 50 Hz à 1-3 Hz à mesure que la vitesse passe de l’arrêt à la pleine charge: la variation de la fréquence du rotor est utilisée dans ces moteurs pour faire varier la résistance au rotor d’une grande valeur à l’arrêt à une très petite valeur à pleine vitesse.
Ainsi, bien que les performances de démarrage et de faible vitesse soient améliorées, les performances de charge complète ne sont pas sensiblement effectuées.
Moteur à induction du rotor à cage écureuil profond:
Le stator de la machine est identique à un moteur d’induction à usage général. Le rotor a des barres de conducteur profondes et étroites comme le montre la figure 6.3 (a).
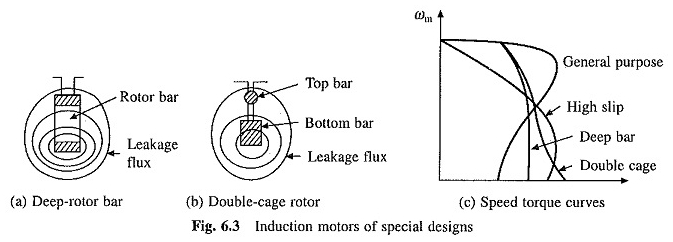
Les flux de fuite de fentes produits par le courant dans la barre sont également illustrés sur la figure. On peut imaginer que la barre est faite d’un certain nombre de couches étroites connectées en parallèle. Comparons le comportement des couches supérieure et inférieure.
Plus de liens de flux de fuite avec la couche inférieure que la couche supérieure. Par conséquent, la couche inférieure a une inductance de fuite beaucoup plus élevée que la couche supérieure. Comme la fréquence du rotor est élevée à basse vitesse, la réactance et l’impédance de la couche inférieure sont beaucoup plus élevées que la couche supérieure.
Par conséquent, à des vitesses basse, la quantité la plus élevée de courant est transportée par la couche la plus supérieure et la plus basse par le bas le plus. En raison de la distribution inégale du courant à travers la section transversale de la barre, une résistance efficace du rotor est élevée et les performances de démarrage et à basse vitesse sont améliorées.
À une vitesse de charge presque pleine, la fréquence du courant du rotor et la réactance des fuites sont faibles. Par conséquent, le courant est également distribué à travers la section transversale de la barre et la résistance efficace du rotor a une faible valeur. Ainsi, les performances de charge complète ne sont pas sensiblement affectées. La nature de la courbe de vitesse de vitesse du moteur est représentée sur la figure 6.3 (c).
Moteur à induction du rotor à double écureuil:
Le rotor se compose de deux couches de barres de conducteur dans chaque fente (Fig. 6.3 (b)) court-circuité par anneaux d’extrémité. La barre supérieure a une section transversale plus petite que le bas. Par conséquent, il a une résistance plus élevée.
La barre inférieure est liée à une quantité plus élevée de flux de fuite que la barre supérieure et a donc une inductance plus élevée. À basse vitesse, pour laquelle la fréquence du rotor est élevée, la barre inférieure a une impédance plus élevée. Par conséquent, plus de courant traverse la barre supérieure.
Comme la résistance de la barre supérieure est obtenue de bonnes performances de démarrage. À des vitesses élevées, pour lesquelles la fréquence du rotor est faible, la barre inférieure a une impédance beaucoup plus petite que celle supérieure.
Par conséquent, le courant de rotor est transporté principalement par la barre inférieure et les performances de charge complète restent bonnes car elles ont une faible résistance. La nature des caractéristiques de vitesse-couple est représentée sur la figure 6.3 (c).
Moteur de couple:
Les moteurs conçus pour fonctionner pendant de longues périodes dans une condition au point mort ou à basse vitesse sont appelés moteurs de couple. Ils sont conçus pour développer le couple souhaité avec un courant faible à basse vitesse.
Leurs caractéristiques de vitesse-Torque sont façonnées pour avoir une pente négative afin qu’ils fournissent un fonctionnement stable avec la plupart des charges à basse vitesse. Ils peuvent être un type d’écureuil ou de type rotor de plaie. Les moteurs à induction triphasés et les moteurs monophasés sont disponibles.