Constructie van de inductiemotor met drie fasen:
Een drie -fasen inductiemotorgebouw Een converter heeft de volgende voordelen op een lijn die aan de lijn is gevoed:
1. De wasstart wordt gegarandeerd door een variabele frequentie van een bodem
2. Het starten en versnellen van het huidige en koppel is mogelijk.
3. Het netwerk is niet langer onderworpen aan een hoge overspanningsstroom, zoals bij de directe schakelaar op de constructie van kooi drie -fase inductiemotoren, en als zodanig kan de speciale startapparatuur zelfs voor hoge kansen worden weggelaten.
4. Veel traagheidsmomenten kunnen worden versneld zonder dat de motorafmeting nodig is.
5.De converter fungeert als een ontkoppelingsapparaat.
Dientengevolge komt motorfeedback op het kortsluitpunt niet op, wanneer de shortlines van lijn, de kortsluitingsbeoordeling, op basis waarvan het grootste aantal diensten moet worden overdreven, daarom laag is, waardoor een economie kan worden gemaakt.
Zoals reeds aangegeven, kan de snelheid van de constructie van de drie -fasen inductiemotor worden geregeld door de stator een variabele spanning te bieden, een variabele frequentie -voeding met behulp van statische frequentieomzetters.
Snelheidsregeling is ook mogelijk door het schuifvermogen in het voedingssysteem te voeden met behulp van converters in het rotorcircuit. Kortom, er zijn twee verschillende snelheidscontrolemethoden.
1. Stuurbesturingscontroletraining De slaapplaatsen wanneer de stator wordt aangedreven door constante spanning, constante frequentiepijpen.
2.Sice Motorbesturing met behulp van een variabele spanning van variabele frequentie, waarbij de motor wordt uitgevoerd op een constante rotorfrequentie.
De snelheidsregeling door variatie in de slipfrequentie wordt als volgt verkregen:
1.Statorspanningsregeling met behulp van een spanningcontroller met drie fasen.
2. Regeling van de rotorweerstand met behulp van een weerstand die wordt geregeld door een helikopter in het rotorcircuit.
3. Met behulp van een convertercascade in het rotorcircuit om de energie van de verschuiving te herstellen.
4. Gebruik een cycloconverteur in het rotorcircuit.
Regeling van een inductiemotor door statorspanningsvariatie (met behulp van een spanningscontroller met drie fasen)
Het is zeer bekend dat het koppel van een constructie van inductiemotoren met drie fase direct varieert in verhouding tot het kwadraat van de spanning. Het koppel van een inductiemotor wordt ongeveer gegeven door

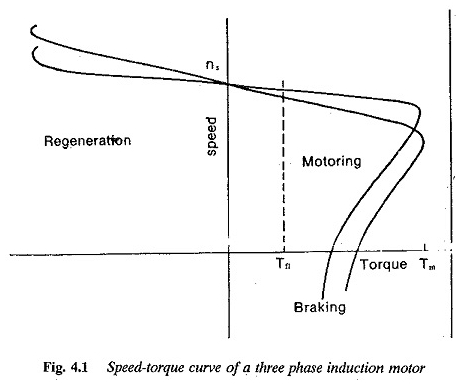
En de koppelsnelheidcurve is zoals weergegeven in figuur 4.1. Het glijden voor het maximale koppel wordt gegeven door 
die onafhankelijk is van de statorspanning. Dit kan echter worden gevarieerd door de variatie in rotorweerstand. De maximale koppelwaarde wordt gegeven door

Het verandert ook zoals het vierkant van de toegepaste spanning. Als de spanning wordt verlaagd tot 80%, daalt het maximale koppel tot 64%. De variatie in de toegepaste spanning wordt verkregen door middel van een spanningscontroller.
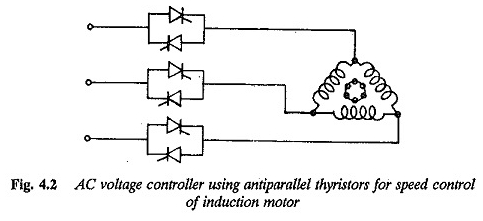
Deze methode voor het regelen van de snelheid van een inductiemotor is eenvoudig en economisch. De statorspanningsregeling wordt verkregen door middel van de fasecontrole van antiparallelle thyristors, verbonden zoals aangegeven in figuur 4.2.
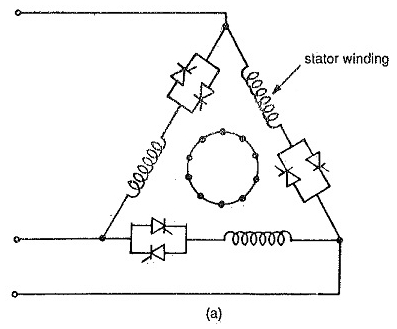
Figuren 4.3 (a) en (b) illustreren twee praktische verbindingen van een spanningscontroller die een motorconstructie levert met drie -fase inductie. In verband met figuur 4.2 mogen thyristors alleen de fasestroom beheren. Harmonische stromingen worden hoger. In figuur 4.3 is de harmonische straf eerder meer.
De statorspanning kan variëren van nul tot volledige waarde in het trigger -hoekbereik. De lijnfactor aan de lijnzijde is zeer middelmatig vanwege harmonischen en reactief vermogen als gevolg van fasecontrole.
Wanneer een kooi -inductiemotor wordt aangedreven vanuit een variabele spanningsvoeding voor snelheidsregeling, kunnen de volgende waarnemingen worden gedaan:
1.De koppelsnelheid voorbij het maximale koppelpunt heeft een negatieve vorm. Een stabiel werkpunt in dit gebied is niet mogelijk voor een constante koppelbelasting.
2.De spanningscontroller moet in staat zijn om een hoge start te weerstaan. Het snelheidsregelbereik is vrij beperkt.
3. De motorvermogensfactor is slecht.
Om de bovenstaande moeilijkheden te voorkomen, moet de constructie van de driefasige inductiemotor een rotor met een hoge weerstand hebben. Dit maakt het maximale koppelveranderingspunt tot S = 1, waardoor het onstabiele gebied van de snelheidssnelheidcurve wordt verminderd.
Vanwege de toename van de rotorweerstand neemt de startstroom af, verbetert de vermogensfactor en neemt het snelheidscontrolebereik toe.
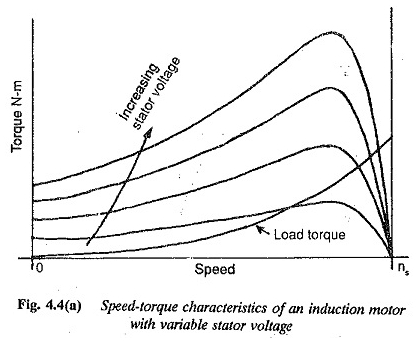
De snelheidsregelmethode is daarom voordelig met een rotor met een hoge weerstand. Koppelsnelheidcurves voor deze regeling worden weergegeven in figuur 4.4 (a). De huidige noot van de controller bepaalt het mogelijke koppel bij elke snelheid.
De koppellimietcurve afhankelijk van de snelheid kan worden afgeleid. Figuur 4.4 (b) toont deze limiet koppelcurve voor de controllerontwerpnotatie, die drie keer de nominale motorstroom is. De stroom als functie van de snelheid en spanning van de stator wordt weergegeven.
Tijdens de controle, als de huidige waarde de limietwaarde overschrijdt, moet de automatische stroomlimiet worden gebruikt. Hierdoor wordt de waarde van de schiethoek aangepast totdat de geautoriseerde stroom circuleert.
Zelfs als de methode eenvoudig en economisch is, nemen motorverliezen toe met de toename van de verschuiving. De toename van de verliezen kan worden toegeschreven aan de toename van de motorstroom als gevolg van de daling van de luchtruimte en de hoge weerstand van de rotor.
De R1 / R′2 -verhouding kan worden beschouwd als representatief om deze verliezen te bepalen omdat de toename van de weerstand beslissend is in de beperking van de huidige getrokken. Motorefficiëntie kan ongeveer worden gegeven door
![]()
Waar S het glijden van de motor is.
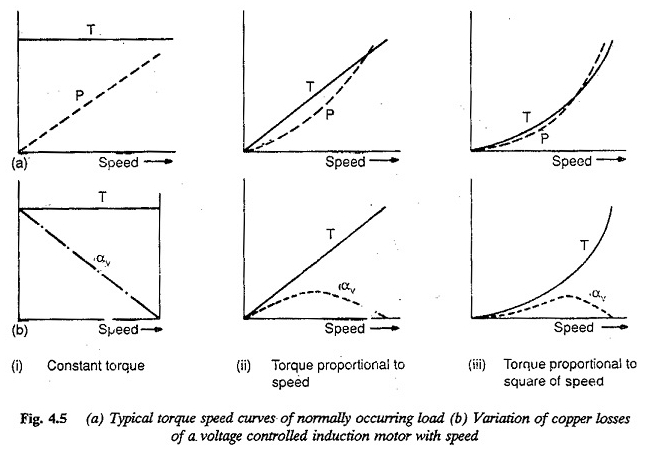
Het type belasting aangedreven door de motor beïnvloedt de getrokken stroom en de verliezen van de motor wanneer de verschuiving varieert. De normaal presterende kosten zijn
1. Comfortabele koppelbelastingen
2.Torque variabele die evenredig is aan snelheid
3. Totor variabele die evenredig is met het kwadraat van de snelheid

Bedenk dat de ladingssnelheidseigenschappen van de belasting worden gegeven door een algemene vergelijking
![]()
Als de waarde van x = 0 is, is deze gelijk aan een constante koppelbelasting. X> 0 voor variabele koppelbelastingen (Fig. 4.5a).
Rotor koperen verliezen
![]()
waarbij PD1 het vermogen van de luchtruimte of de ingang van de rotorvoorziening is.

Maar het glijden van de motor
en de rotorvermogensinvoer
![]()
De maximale vermogenswaarde overgedragen naar de rotor is
![]()
Koperverliezen wanneer uitgedrukt als het PD1Max -rapport dat we hebben
Voor de waarde van SAT die maximaal is. De waarde van

Voor een maximale waarde van het koperverlies van de rotor. De maximale waarden van rotor koperen verliezen worden gegeven door

Naarmate de waarde van X toeneemt, neemt de waarde van YM af. De maximale waarde van de rotorstroom en de snelheid van de eenheid waarmee deze zich voordoet, kunnen ook worden bepaald. We hebben
waaruit de rotorstroom
![]()
door eenheidssnelheid voor de maximale waarde van de rotorstroom is ook
![]()
De maximale waarde van de rotorstroom kan worden bepaald als
Voor speciale gevallen
De variatie in verliezen wordt weergegeven in figuur 4.5 (b) voor verschillende soorten belastingen. Constante koppelbelastingen zijn niet de voorkeur vanwege de toename van slechte verliezen met de verschuiving en maximaal worden tot S = 1,0.
Dit is duidelijk, door de variatie van de stroom omdat de spanning wordt gevarieerd voor snelheidsregeling. Om een constant koppel te behouden, trekt de motor een zware stroom aan, wat leidt tot slecht koppel / ampère, slechte efficiëntie en een slechte vermogensfactor bij lage snelheid.
Wanneer het koppel varieert in directe verhouding om te versnellen, hebben koperverliezen een maximale waarde van 25% nominaal vermogen met een snelheid van 0,5 Ω.
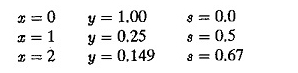
Voor paren die evenredig zijn aan het kwadraat van de snelheid, is de snelheid van de eenheid waarmee koperverliezen maximaal 2/3 zijn en de maximale waarde van koperverliezen 0,149 nominaal vermogen is.
De snelheidsregelmethode kan voordelig worden gebruikt voor pomp- of ventilatorbelastingen waarbij het koppel evenredig is met het kwadraat van de snelheid.
Uit de bovenstaande discussie is deze snelheidscontrolemethode alleen geschikt voor de volgende gevallen:
1. Voor korte -termijnbewerkingen waarbij de duur van snelheidsregeling wordt gedefinieerd.
2. om de snelheid van de blazers of pompen te regelen met parabolische of kubieke variaties in koppel met snelheid. Dit is niet geschikt voor constante koppelbelastingen als gevolg van een toename van verliezen en verwarming.
3. Om het motortoerental te regelen met een slechte efficiëntie onder normaal werking.
Het type belasting (koppel afhankelijk van de snelheid van de belasting) op de aandrijfmotor beïnvloedt de verliezen in de motor. Niet -sinusoïdale toegangsgolven veroorzaken niet -sinusvormige stromen die de harmonische verliezen verhogen.
Bijgevolg nemen de totale verliezen met name toe bij lage snelheden en deze verliezen veroorzaken mogelijk verkleinen van de motor, of een overdreven dimensionale motor moet worden gebruikt wanneer deze methode wordt gebruikt.
Voor het blazende type belastingen waarbij T α N2 de maximale waarde van de stroom optreedt met een snelheid van 2/3 van de basissnelheid. Deze stroom hangt af van de volledige motorbelasting van de motor. Voor grote schuifmotoren (rotoren met hoge weerstand) neemt de maximale stroom tot nominale stroom af.
Voor constante koppelbelastingen nemen de vermogensverliezen toe met de snelheidsverlaging en bereikt het maximale waarde met nulsnelheid zelf. Voor belastingen met t α n treedt het maximum op bij 1/2, de basissnelheid en verliezen bedragen 25% van het vermogen van de stator.
De verliezen in de motor zijn verantwoordelijk voor de stijging van de motortemperatuur. De verliezen moeten in de geautoriseerde waarde worden bewaard, zodat de motor nog steeds werkt met een geautoriseerde temperatuurstijging. De verschillende soorten besproken ladingen hebben de neiging om de motorverliezen te verhogen.
Bovendien is de golfvorm van de ingangsspanning vervormd. De stator- en rotorstromen zijn niet -sinusoïdaal met rijke harmonische inhoud. Deze harmonischen veroorzaken extra verliezen. Ze kunnen worden beschouwd als 50% van de nominale koperen verliezen.
De toename van motorverliezen met grote verschuivingen leidt tot een vernauwing van de motor. Een normale motor kan van 5 tot 6 keer worden vrijgegeven. Als de rotor met hoge weerstand wordt gebruikt, neemt de luchtige factor af.
Totale motorverliezen zijn

Of
FV zorgt voor de toename van verliezen als gevolg van vervorming en wordt normaal beschouwd als 1,5.
PR is de beoordeling van de motor
K1PR is het totaal van koperverlies van de motor.
Om de verhoging van de geautoriseerde temperatuur te handhaven, zijn de geautoriseerde verliezen

Of
η is motorefficiëntie
αV is de relatie van verliezen met een minimale snelheid om verliezen op te merken. snelheid.
PTVP -beoordeling van de motor.
De αV -factor is afhankelijk van het gebruikte type belasting. Voor machines die met geweld zijn afgekoeld, is het 1,0 en onafhankelijk van snelheid. Als de machine automatisch refroit is, hangt deze af van de snelheid. Deze waarde neemt af naarmate de ondergrens van de snelheid afneemt.
Een typisch kenmerk voor een machine met twee polen wordt weergegeven in figuur 4.5 (c). De vernauwing wordt ook beïnvloed door de efficiëntie van de motor. Naarmate de efficiëntie afneemt, neemt 1 -η / η toe. Voor dit type snelheidsregelmotor van de grote rotor worden 17 weerstand gebruikt. Ze hebben een slechte efficiëntie. Daarom neemt de vermindering van de motor af.

De bovenstaande discussie geeft duidelijk aan dat een bepaalde motor anders wordt vervormd wanneer deze verschillende soorten belastingen veroorzaakt.
Met andere woorden, de door de belasting vereist vermogen is constant, de aandrijfmotor moet verschillende afmetingen zijn voor verschillende soorten laadsnelheidcurves van de belasting, het voorbeeld afhankelijk van de illustere.