Deel -georiënteerde regeling van de drie -fase inductiemotor:
De statorstroom van een inductiemotor heeft de productiefuncties van de vereiste luchtruimtestroom (magnetisatie) en het ontwikkelen van het vereiste koppel om de belasting te veroorzaken.
Een gecontroleerde regeling van de drie -fasen inductiemotor zal zijn werking hebben vergelijkbaar met die van een continue stroommotor als de statorstroomcomponenten (namelijk stroomproductie en koppelproductie) afzonderlijk kunnen worden geregeld.
Dit type bediening is mogelijk in een opgewonden CC -motor afzonderlijk, waarbij het koppel en de stroom afzonderlijk en onafhankelijk kunnen worden geregeld door respectievelijk de versterking en veldstroom te variëren.
Er zou een inherente ontkoppeling tussen hen bestaan, maar voor de effecten van de reactie van de versterking. Deze effecten kunnen worden geëlimineerd door compensatie voor versterking. Een perfecte ontkoppeling kan worden verkregen in een opgewonden CC -motor afzonderlijk betaald.
Deze veelzijdige besturing geeft een zeer goed dynamisch gedrag aan een continue huidige motor. Aldus wordt een hoogwaardige aandrijving met behulp van een motorbesturingselement met drie fasen verkregen door te proberen de statorstroomcomponenten te ontkoppelen.
Dit principe wordt controle van de oriëntatie van het veld of controle van de vector genoemd. Deze controle verbetert dynamisch gedrag en zeer goede prestatietraining kan worden verkregen, zelfs bij lage snelheid.
De twee componenten van de stroom worden geïdentificeerd en ze zijn correct georiënteerd in de orthogonale bevelen in vergelijking met de stroomvector.
De huidige componenten kunnen worden georiënteerd in relatie tot een van de drie stromen, namelijk de statorstroom, de luchtruimtestroom of de rotorstroom.
De analyse toont aan dat de dynamische prestaties van de lezer niet op het gewenste niveau zijn als de oriëntatie wordt uitgevoerd in vergelijking met de stator of de luchtruimtestroom. Dit dynamische slechte gedrag komt voort uit de vertraging van het paar door de verschuiving te volgen.
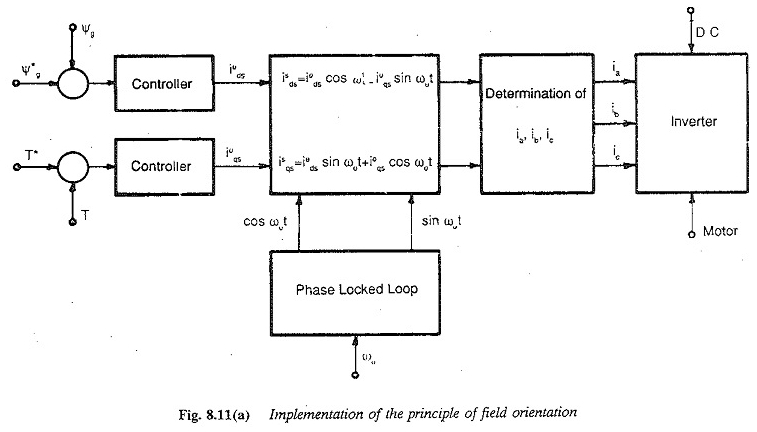
Een natuurlijke en effectieve ontkoppeling is mogelijk als de oriëntatie wordt uitgevoerd in vergelijking met de rotorstroom, dit leidt tot een hoogwaardige koppelregeling van het rijden met een zeer snelle reactie. De implementatie van het oriëntatieprincipe op de grond wordt geïllustreerd in figuur 8.11.
 Toen het principe van veldoriëntatie werd voorgesteld, kreeg het niet de aandacht van de industrie en was het niet erg populair vanwege gecompliceerde apparatuur. Met ontwikkelingen in digitale componenten en microprocessors via LSI, en de miniaturisatie van componenten, wordt deze hoge prestatiecontrole van de regeling van de drie -fase inductiemotor populair. Een hoofdveld van toepassing en effectief gebruik van microprocessors met hoge snelheid is de vectorregeling van gereguleerde regeling in de drie -fase inductiemotor. Deze controle vereist
Toen het principe van veldoriëntatie werd voorgesteld, kreeg het niet de aandacht van de industrie en was het niet erg populair vanwege gecompliceerde apparatuur. Met ontwikkelingen in digitale componenten en microprocessors via LSI, en de miniaturisatie van componenten, wordt deze hoge prestatiecontrole van de regeling van de drie -fase inductiemotor populair. Een hoofdveld van toepassing en effectief gebruik van microprocessors met hoge snelheid is de vectorregeling van gereguleerde regeling in de drie -fase inductiemotor. Deze controle vereist
- Exacte informatie over de rotorstroom.
- De precieze aanpassing van de statorstroomcomponenten als functie van de referentie.
De functies van een microprocessor in de vectorregeling van de inductiemotor zijn als volgt:
- Behandeling van signalen verkregen uit de boomcoder om de snelheid van de rotor en ook de hoek van de rotor te bepalen. Deze rotorhoek moet worden gebruikt in transformaties van het ene frame naar het andere.
- De stroomschatting met behulp van terminalspanningen, stromen en snelheid, afhankelijk van een van de machinemodellen.
- Berekeningen met betrekking tot fase en coördineert transformaties om de twee componenten van de stroom te identificeren. Na de nodige controle moeten deze componenten worden getransformeerd om de referentiewaarden te bieden ter vergelijking met reële fasestromen.
- Snelheid en huidige lussen in feedbackregeling. De implementatie van controllers in deze lussen.
- Om roostersignalen voor de machine -zijkant en de lijnzijde te produceren, bepaalt de machine -zijdeconverter de frequentie terwijl de lijnzijde de stroom / spanning bepaalt. De schietsignalen naar de laterale lijnomvormer worden op dezelfde manier verkregen als beschreven voor een dubbele converter. De schietsignalen naar de machine -zijconverter bepalen de frequentie. De snelheid van besturing georiënteerd op het veld van drie -fase inductiemotor wordt toegevoegd aan de uitgang van de schuifregelaar om de frequentie van de omvormeruitgang te bepalen. De toevoeging moet nauwkeurig zijn omdat een grote hoeveelheid wordt toegevoegd aan een kleine. Digitale toevoeging aan een microprocessor is nauwkeurig. De microprocessor moet daarom schietsignalen kunnen verstrekken of genereren aan de machine -zijconverter.
- Verwerving van gegevens De microprocessor moet feedbacksignalen in digitale vorm verwerven. Een gegevensoverdracht naar de processor is vereist. Een gegevensstroom van de processor en de processor is vereist.
- Het beperken van de lineaire functies Controle -variabelen die worden gebruikt in controlegedrag en het niet -lineaire gedrag van de converter tijdens discontinue geleiding. Compensatie voor variabele versterking tijdens discontinue modi van geleiding en verzwakking van het veld.
Wiskundige bewerkingen omvatten vermenigvuldiging, verdeling, toevoeging en aftrekking. De arithmetische verwerkingseenheid van de microprocessor moet deze bewerkingen kunnen uitvoeren.
De schatting van de stroom kan worden uitgevoerd door digitale integratie met behulp van de goed bekende Simpson -regel of de trapeziumvormige regel. Maar de resultaten lijden aan een verlies van precisie als gevolg van truncatiefouten bij acht -bit -processors. Deze fouten leiden tot de instabiliteit van operaties.
Gebruik i van drijvende commando met dubbele precisie verbetert de prestaties van de processor. Dit vereist echter een lange periode van berekening. Om de microprocessorbelasting te verminderen, kan de schatting van de stroom worden weggelaten door analoge modellen extern naar de processor.
De berekende stroom kan in de processor worden behandeld. De referentiewaarden van stromen en stromen worden ontwikkeld door de processor.
Afhankelijk van de snelheid van de processor en zijn vermogen om de bovenstaande functies te vervullen, kan een rand worden vastgesteld tussen de lokale apparatuur en de microprocessor om de functies te vervullen.
Soms kan de multi -processorbesturing worden uitgevoerd, afhankelijk van de snelheid en kwaliteit van de vereiste controle.
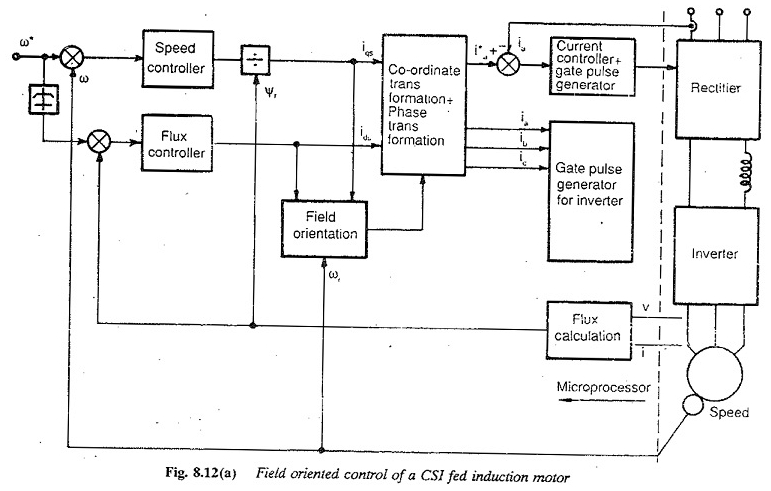
De oriëntatie op de grond is mogelijk met de spanningsbronomvormer en de besturing van de huidige bron van de huidige bron geleverd door het veld van de drie -fase inductiemotor. De huidige bronomvormer wordt veel gebruikt vanwege de eenvoud van zijn stroomcircuit.
De kenmerken van de besturingsgerichte controle met behulp van CSI worden hier besproken (8.12 (a)). Soms kan een PWM -omvormer correct worden gecontroleerd om referentiestromen te verstrekken (Fig. 8.12 (b)). Deze controle kan worden uitgevoerd met behulp van een microprocessor.

De stroom kan direct worden gemeten met behulp van onderzoeksspoelen of hals probes. Analoge signalen worden omgezet in digitaal om zichzelf te voeden in de microprocessor voor latere behandeling.
Deze directe maatregel, zelfs als theoretisch exact, heeft de volgende beperkingen of moeilijkheden: de aanwezigheid van gevoelige kamersondes of zoekspoelen maakt de inductiemotor gevoeliger, maar de inherente robuustheid ervan gaat verloren.
Het gemeten signaal wordt gesuperponeerd door spleetharmonischen die filtering vereisen. Helpfouten bij het meten en conversie maken de resultaten niet erg betrouwbaar. Daarom wordt normaal gesproken de FLWC -berekening met behulp van machinemodellen gebruikt (indirecte schatting).
Deze modellen van machines om de stroom te berekenen, gebruiken de regeling die op de grond van de drie -fase inductiemotorparameters wordt bepaald uit rotortests zonder belasting en geblokkeerd. Onnauwkeurigheid; Onder de modellen bij de schatting van parameters, de variatie van de machine!
De parameters als gevolg van temperatuur en verzadiging moeten in de schatting exact in aanmerking worden genomen. Precisie wordt gewijzigd in het geval van integratie die bij de schatting betrokken is. Dit gebeurt als de spanning en snelheid worden gebruikt in de berekening.
Bij lage snelheid introduceert de integratie aanzienlijke fouten in deze fouten en betrouwbare prestaties kunnen bij de stop op een breed scala van stops worden gemaakt.
Om de prestaties te verbeteren, moeten de in het model gebruikte machine -instellingen zo nauwkeurig mogelijk zijn. Anders kunnen ze worden gecorrigeerd met behulp van een correctieproces, zodat de exacte koppeling mogelijk is. Het correctieproces verbetert de parameter.
Het schatten van de indirecte stroom en de identificatie of aanpassing die bekend staat als parameters worden gebruikt om een inductiemotor te verkrijgen met perfecte koppeling.
De geschatte stroom van werkelijke gedetecteerde variabelen van de stroom en snelheid met de parameters, wordt vergeleken met de referentiewaarde (bepaald uit de referentiegehoeveelheden). Het verschil wordt gebruikt om de parameters van de machine die de berekeningen invoert te corrigeren.
De meest invloedrijke parameter is de rotorweerstand of de rotortijdconstante en deze wordt gecorrigeerd totdat de vereiste waarde van de stroom door het model wordt gegeven.
De enige oplossing voor veldgeoriënteerde regeling met aanpassing van parameters is het gebruik van microprocessors of microcomputers. Er zijn verschillende technieken beschikbaar in de literatuur voor het aanpassen van parameters. Een dergelijk diagram wordt geïllustreerd in figuur 8.13.
De microprocessor moet wiskundige bewerkingen uitvoeren om de stroom van zowel referentiewaarden als gemeten variabelen te schatten.

Het selecteren van een microprocessor voor de bovenstaande toepassing kan worden gebaseerd op de volgende overwegingen:
- Resolutie van de prijs voor de gecontroleerde gelijkrichter in fase. De resolutie beslist over asymmetrie in de schietpartij.
- Wiskundige bewerkingen die kunnen worden uitgevoerd. Het moet in staat zijn tot binair en decimaal rekenkunde, inclusief vermenigvuldiging en divisie
- De vereiste geheugencapaciteit
- Interne klokgeneratie
- Softwarebeheer voor de implementatie van controllers, limiters, etc.
- Onderbrekingscapaciteit
Sommige andere toepassingen van een microprocessor bij de controle van inductiemotoren zijn:
- Een microprocessor kan worden gebruikt om snelheid te coholeren met behulp van een spanningscontroller
- Het kan worden gebruikt om de snelheid te regelen met behulp van het schema -schema voor het herstel van de glijdende energie. Verctorsbesturing kan hier ook worden gebruikt.
- Het kan worden gebruikt voor gecontroleerde gecontroleerde lezer met de stroom- en koppelregeling in Fed CSI -training.
- Kan worden gebruikt om PWM -technieken te implementeren om spanning en harmonischen te regelen, zowel in VSI- als CSI -inductiemotoren.
- Het kan worden gebruikt voor het besturen van de CycloConverteur.