Drie -fase inductiemotoren:
De drie -fasen inductiemotoren zijn van twee soorten: de eekhoorndoos en de rotor van de wonden.
In de eekhoorn-kooi bestaat de rotor uit longitudinale driverstaven kortgesloten door cirkelvormige connectoren aan beide uiteinden terwijl in de motor van de wondrotor, de rotor ook een uitgebalanceerde driefasige wikkeling heeft met dezelfde paal als de statorwikkeling. In beide draagt de stator echter een gedistribueerde wikkeling met drie fasen.
Analyse en prestaties:
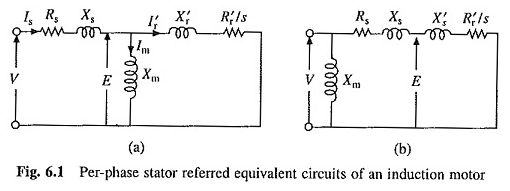
Het circuitequivalent per fase van een inductiemotor met drie fasen wordt weergegeven in figuur 6.1 (a). R′r en X′R zijn de verwezen waarden van de stator van de weerstand van de RR -rotor en de reactantie van de rotor XR. De verschuiving wordt gedefinieerd door

waarbij ωm en ωms respectievelijk rotor- en synchrone snelheden zijn. Verder

waarbij F en P de voedselfrequentie zijn en het aantal palen respectievelijk.
Omdat de daling van de stator in impedantie in het algemeen te verwaarlozen is in vergelijking met terminal V -spanning V, kan het equivalente circuit worden vereenvoudigd tot dat getoond in figuur 6.1 (b).
Ook van de vergelijking. (6.1)
![]()
In figuur 6.1 (b),

Vermogen overgebracht naar de rotor (of luchtkracht)
![]()
Rotor’s verlies van koper is
![]()
Elektrisch vermogen omgezet in mechanisch vermogen

Koppel ontwikkeld door de motor
![]()
Vergelijkingen vervangen. (6.3) en (6.7)

Vervangen door de vergelijking. (6.4) geeft
Een vergelijking van vergelijkingen. (6.5) en (6.9) suggereren dat

Het motoruitgangskoppel aan de boom wordt verkregen door paren van wrijvingsafwijking en kern-kern van het ontwikkelde koppel af te trekken.
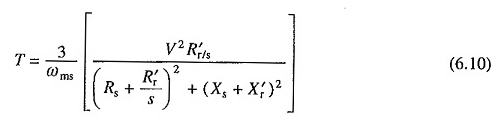
Het ontwikkelde koppel is alleen afhankelijk van het glijden (vergelijking (6.10)). De differentiatie van t in (6.10) ten opzichte van s en assimileren naar nul geeft de verschuiving voor een maximumkoppel 
Vervangen door de vergelijking. (6.12) in (6.10) geeft een uitdrukking voor maximaal koppel

Het maximale koppel staat ook bekend als het foutkoppel. Hoewel het onafhankelijk is van de rotorweerstand, is SM recht evenredig met de weerstand tegen de rotor.
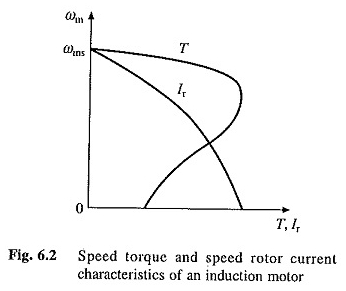
De aard van de snelheids- en snelheidssnelheidskenmerken worden weergegeven in figuur 6.2. De rotorstroom en het koppel zijn nul met synchrone snelheid. Met een afname van de snelheid nemen beide toe.
Terwijl het paar verminderde na het bereiken van de afbraakwaarde, blijft de rotorstroom toenemen, waardoor de maximale waarde met nulsnelheid wordt bereikt. De druppel in de snelheid van de volledige belastingheffing hangt af van de rotorweerstand.
Wanneer de rotorweerstand laag is, is de druppel vrij klein en daarom werkt de motor voornamelijk met een constante snelheid. Het faalkoppel is een maat voor de kortetermijnoverbelastingscapaciteit van de motor van de motor.
De motor werkt in de richting van het roterende veld. Richting van het roterende veld, en daarom kan het motortoerental worden omgekeerd door de fasevolgorde om te keren. De fasevolgorde kan worden omgekeerd door twee motorterminals uit te wisselen.
Soms wordt het koppel uitgedrukt in termen van SM en Tmax, die niet alleen berekeningen vergemakkelijkt, maar ook een snelle waardering van de aard van de snelheidssnelheidskenmerken mogelijk maakt. Verdeel de vergelijking. (6.10) door (6.13) vervang vervolgens de opbrengsten (6.12)
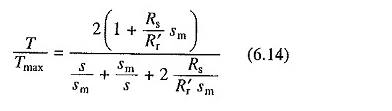
De aard van de snelheidssnelheidseigenschappen (Fig. 6.2) kan nu eenvoudig worden verklaard door de vergelijking. (6.14).
Voor verschuivingen veel kleiner dan SM domineert de tweede termijn van de noemer. Daarom wordt de snelheidssnelheidrelatie van 0 tot nominaal koppel ongeveer weergegeven door een rechte lijn.
Voor dia’s die veel groter zijn dan SM, domineert de eerste term van de noemer en heeft de snelheidsplotrelatie een hyperbolische vorm in deze regio.
Gedurende de motor van de motorbewerking is de term (RSSM / R’r) klein vergeleken met 1 en uiteindelijk dominant in de noemer. Daarom kan het worden verwijderd uit de vergelijking. (6.14). Dus

Inductiemotoren met speciale ontwerpen:
Een inductiemotor voor algemeen gebruik is ontworpen om te werken met lage glijbaan om goede lopende prestaties te hebben. Volgens de noot varieert de volledige belasting van 2 tot 7%.
Een dergelijke motor heeft een hoge opstartstroom (5-8 keer) en een laag startkoppel (volledige belasting bij het volledige laadkoppel van tickets). Sommige toepassingen vereisen dat de motor anders wordt ontworpen. Sommigen van hen zijn:
High -slip inductiemotoren:
Voor intermitterende laadtoepassingen, waarbij start -up en stoppen en / of frequent werken bij lage snelheid voor langdurige periodes, zijn inductiemotoren ontworpen met een hoge weerstand tegen rotor.
Deze motoren hebben een lage startstroom en een hoog start -up koppel, maar lage volledige belastingefficiëntie vanwege een hoog koperverlies met een rotor. Omdat deze motoren bij een grote verschuiving werken (tussen 10 en 40% bij volledige belasting), worden ze hoge schuifmotoren genoemd.
Hoge schuifmotoren zijn ook geschikt voor trainingen van fans waarbij snelheid wordt geregeld door het regelen van de statorspanning en tussen de twee -vierkante -razen en de rotor van de wond liggen. De aard van de schotsnelheidseigenschappen van deze motoren wordt weergegeven in figuur 6.3 (c).
In de inductiemotoren van eekhoorngevallen wordt goede startprestaties (lage startstroom en hoog startkoppel) gemaakt zonder de volledige belastingprestaties aanzienlijk te beïnvloeden met behulp van diepe balk of dubbele kooi rotorrotormotoren.
De frequentie van de rotor gaat van 50 Hz naar 1-3 Hz terwijl de snelheid van de stop gaat bij volledige belasting: de variatie in de frequentie van de rotor wordt in deze motoren gebruikt om de weerstand tegen de rotor van hoge waarde bij de stop op een zeer kleine waarde op volle snelheid te variëren.
Hoewel de start- en lage snelheidsprestaties worden verbeterd, worden de prestaties van volledige belasting dus niet significant uitgevoerd.
Plaatsvervangend eekhoorninductie -inductiemotor:
De machine -stator is identiek aan een inductiemotor voor algemeen gebruik. De rotor heeft diepe en smalle stuurstaven zoals weergegeven in figuur 6.3 (a).
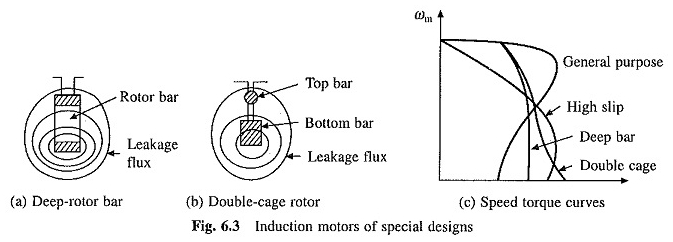
De sleuflekkagestromen geproduceerd door de stroom in de balk worden ook geïllustreerd in de figuur. Men kan zich voorstellen dat de balk is gemaakt van een bepaald aantal smalle lagen parallel verbonden. Laten we het gedrag van de bovenste en onderste lagen vergelijken.
Meer lekstroom verbindt met de onderste laag dan de bovenste laag. Bijgevolg heeft de onderste laag een veel hogere lekkage -inductantie dan de bovenste laag. Omdat de frequentie van de rotor bij lage snelheid hoog is, zijn de reactantie en de impedantie van de onderste laag veel hoger dan de bovenste laag.
Bijgevolg wordt bij lage snelheden de hoogste hoeveelheid stroom getransporteerd door de hoogste en laagste laag onderaan. Vanwege de ongelijke verdeling van de stroom door het dwarsgedeelte van de balk is een effectieve weerstand van de rotor hoog en zijn de start -upprestaties en met lage snelheid verbeterd.
Bij een bijna volledige belastingsnelheid is de frequentie van de rotorstroom en de lekken reactantie laag. Bijgevolg wordt de stroom ook verdeeld door het dwarsgedeelte van de balk en heeft de effectieve weerstand van de rotor een lage waarde. Aldus worden volledige belastingprestaties niet significant beïnvloed. De aard van de motortoerentalcurve is weergegeven in figuur 6.3 (c).
Dubbele eekhoornrotorinductiemotor:
De rotor bestaat uit twee lagen staven van de bestuurder in elke spleet (Fig. 6.3 (b)) kortsluiting door eindringen. De bovenste balk heeft een kleiner transversaal gedeelte dan de bodem. Daarom heeft het een hogere weerstand.
De onderste balk is gekoppeld aan een hogere hoeveelheid lekstromen dan de bovenste balk en heeft daarom een hogere inductie. Bij lage snelheid, waarvoor de frequentie van de rotor hoog is, heeft de onderste balk een hogere impedantie. Daarom kruist meer stroom de bovenste balk.
Omdat de weerstand van de bovenste balk wordt verkregen uit goede start -up -prestaties. Bij hoge snelheden, waarvoor de frequentie van de rotor laag is, heeft de onderste balk een veel kleinere impedantie dan dat bovenwerk.
Bijgevolg wordt de rotorstroom hoofdzakelijk getransporteerd door de onderste balk en blijven de volledige belastingprestaties goed omdat ze een lage weerstand hebben. De aard van de versnellingssnelheidskenmerken wordt weergegeven in figuur 6.3 (c).
Koppelmotor:
De motoren die zijn ontworpen om lange periodes in een still of bij lage snelheid te werken, worden koppelmotoren genoemd. Ze zijn ontworpen om het gewenste koppel te ontwikkelen met lage snelheid bij lage snelheid.
Hun snelheidskenmerken zijn gevormd om een negatieve helling te hebben, zodat ze stabiele werking bieden met de meeste lage snelheidsbelastingen. Ze kunnen een type eekhoorn- of rotortype wond zijn. Piphanted inductiemotoren en enkele fase -motoren zijn beschikbaar.