Triphase Inductie Motorsnelheidsregeling:
Het probleem van het regelen van drie -fasen inductiemotorsnelheid is in het bijzonder van groot praktisch belang.
In een aantal industrieën moeten motoren voldoen aan zeer strikte karakteristieke vereisten, zowel met betrekking tot het bereik als de zoetheid van controle en ook met betrekking tot economisch functioneren.
Vanuit het oogpunt vanuit het zicht op de snelheid van de kenmerken van de drie -fase inductiemotor zijn de inductiemotoren lager dan de DC -motoren.
De snelheid van een shunt CC -motor kan worden aangepast tussen een breed bereik met goede efficiëntie en goede snelheidsregulering, maar in inductiemotoren kan de snelheid niet worden gevarieerd zonder de efficiëntie en goede snelheidsregulatie te verliezen.
De snelheid van een inductiemotor wordt gegeven door de uitdrukking

Er zijn dus drie factoren, namelijk de F -vermogensfrequentie F, het aantal Ple Pôles P en de slachtingen waarop de snelheid van een inductiemotor afhangt. Om de snelheid van een inductiemotor te veranderen, is het daarom essentieel om ten minste een van de drie bovenstaande factoren te wijzigen.
De methoden met drie fasen inductie -motelsnelheidsbeheersing worden onderscheiden, afhankelijk van de hoofdactie op de motor: (i) aan de statorzijde en (ii) aan de zijkant van de rotor.
Verschillende methoden voor het regelen van de snelheid van de inductiemotor met drie fasen aan de statorzijde zijn (a) de variatie in de voedingsfrequentie (b) de variatie van de toegepaste spanning en (c) door het aantal polen te wijzigen.
Aan de zijkant van de rotor kan de snelheid worden geregeld (a) door de weerstand in het rotorcircuit te wijzigen en (b) door in het rotorcircuit een extra EMF van dezelfde frequentie te introduceren als de fundamentele EMF van de rotor.
Voor deze nieuwste methode met drie fasen inductiemotoren zijn een extra elektrische machine of meer van deze machines nodig.
Een set samengesteld uit een gereguleerde inductiemotor en een of meer extra elektrische machines die elektrisch of mechanisch zijn aangesloten, wordt een cascade genoemd. Schakelmachines worden vaak gebruikt als extra machines.
1. Snelheidsregeling door variatie in de voedingsfrequentie
Deze motorbesturingsmethode met drie fasen biedt een breedsnelheidsregelbereik met een progressieve variatie in snelheid in dit strand. De belangrijkste moeilijkheid met deze methode is hoe het dieet in variabele frequentie te verkrijgen.
De voor dit doel vereist hulpapparatuur leidt tot hoge eerste kosten, meer onderhoud en een daling van de totale efficiëntie. Daarom wordt deze methode niet gebruikt voor snelheidsregels voor algemeen gebruik.
Ondanks het feit dat dit diagram ingewikkeld is, zijn er bepaalde toepassingen waarin het brede snelheidsbereik en de goede snelheidsverordening permanent zeer wenselijk maken.
Als een inductiemotor op verschillende frequenties moet werken met praktisch constante waarden van efficiëntie, vermogensfactor, overbelastingscapaciteit en een constante absolute verschuiving, dan is het met onverzadigd ijzer essentieel dat de voedingsspanning varieert in verhouding tot de frequentie van de voeding.
Dit type variatie kan bijvoorbeeld optreden, als de voedingsgenerator onderhevig is aan snelheidsvariaties, hetzij als gevolg van tijdelijke overbelastingen of vanwege een significante snelheidsregulering. De spanning en de uitgangsfrequentie variëren zowel als een snelheid als er geen automatische correctie wordt verstrekt.
Bij bepaalde grote mariene training zijn de motoren van de propeller van het type inductie en worden ze met een dergelijke lokale voeding geregeld die wordt geleverd door synchrone generatoren in combinatie met turbines met variabele snelheid.
Zelfs in dergelijke gevallen is het snelheidsvariatiebereik beperkt, omdat de effectiviteit van de hoofdmotoren snel valt met de verandering van snelheid in vergelijking met wat ze zijn ontworpen.
Typische snelheidssnelheidcurves voor vier verschillende frequenties worden weergegeven in figuur 1.25.

2. Snelheidsregeling door variatie in de voedingsspanning
Het is een schuifregelingsmethode met een variabele voedingsfrequentie -voedingsspanning. In deze methode voor het regelen van de snelheid van inductiemotoren is de spanning die op de stator wordt toegepast gevarieerd om de snelheid te variëren.
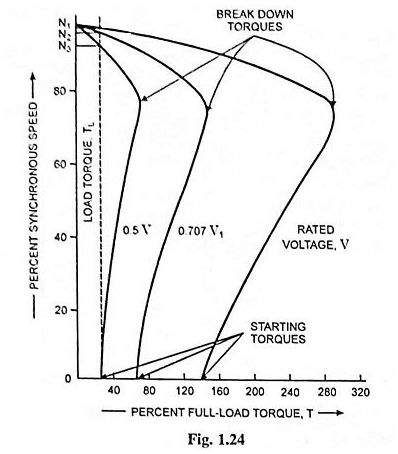
Deze methode voor snelheidsregeling van de driefasige inductiemotor is eenvoudig, laag in de eerste kosten en heeft een lange onderhoudskosten die het beperkt gebruik heeft omdat de werking bij spanningen die overschatte spanning worden beperkt door magnetische verzadiging, (ii) een grote verandering in spanning (iii) Het ontwikkelde koppel verkort de reductie in de voedingsvoltage en de motor bij de lading van de machinevestiging en de model (Iv) Het snelheidsregelbereik is zeer beperkt in de richting van de richting, dat wil zeggen nominale snelheid bij de lagere snelheden.
Over het algemeen wordt deze motorbesturingsmethode met drie fasen alleen gebruikt op belastingen waarbij het vereiste koppel aanzienlijk daalt naarmate de snelheid wordt verlaagd, zoals bij kleine eekhoornkooimotoren die de fans leiden.
De variabele spanning kan worden verkregen door middel van verzadigde reactoren, variiacs of transformators met een verschuivingsverandering.
De kenmerken van versnellingsbak met verminderde spanningen worden geïllustreerd in figuur 1.24.
3. Snelheidsregeling door het aantal polen te wijzigen
Deze methode is eenvoudig van toepassing op eekhoornkooi -motoren omdat een kooiwikkeling automatisch reageert om hetzelfde aantal polen te maken als de stator.
Deze motorbeheersingsmethode met drie fasen is over het algemeen niet mogelijk met de wortelmotoren van wonden, zoals in deze machines, deze methode zou aanzienlijke complicaties van ontwerp en schakelen met zich meebrengen, omdat onderlinge verbindingen van primair en secundair tegelijkertijd moeten worden gemodificeerd om hetzelfde aantal palen in de twee wikkelingen te produceren. Anders zal een negatief stel worden ontwikkeld door enkele van de riemen van de rotordriver.
Het aantal paren palen in de stator kan als volgt worden gewijzigd:
(a) Met behulp van verschillende statorwikkelingen: In deze motorbesturingsmethode met drie fasen worden twee of meer onafhankelijke wikkelingen, elke blessure voor een ander aantal polen, in dezelfde gokautomaten geplaatst. Het aantal statorwikkelingspalen is hierin
In geen geval onderling afhankelijk verbonden en kan niet willekeurig worden gekozen volgens de bedrijfsomstandigheden van deze motor.
Een motor met twee snelheden kan bijvoorbeeld twee statorwikkelingen hebben, een blessure voor 4 palen en een andere voor 6 polen die synchrone snelheden van 1500 tpm en 1000 tpm met een vermogensfrequentie van 50 Hz geven.
Motoren met vier onafhankelijke statorwikkelingen worden soms ook gebruikt en ze geven vier synchrone snelheden (en daarom lopen). Natuurlijk wordt een wikkeling tegelijkertijd gebruikt, de anderen zijn volledig ineffectief.
De verandering van de ene snelheid naar de andere kan worden uitgevoerd door een mechanische schakelaar of door contactoren. Met een dergelijke opstelling moeten kronkelen of wikkelingen die / niet worden gebruikt, open worden gehouden door de schakelaar, of op zijn minst in een ster achtergelaten.
Anders, zou vanwege de werking van de transformator de wikkeling die met het voedsel is verbonden spanningen in de inactieve wikkeling veroorzaken en oververhitting veroorzaken vanwege de volgende circulerende stromingen.
De verordening zelf is gelijk aan de wijziging van de snelheid van de motor in stappen, omdat de ene of de andere wikkeling van de stator is aangesloten op de energiesector.
Bij elke wijziging is de motor onder omstandigheden in wezen vergelijkbaar met de vertrekomstandigheden, dat wil zeggen een significante stroom en een verminderd koppel. Vanwege inactieve stuurprogramma’s vereist deze methode voor wijziging van de post een grote stator die een motor met een enkele snelheid van dezelfde noot.
Deze methode werd gebruikt voor liftmotoren, tractie -motoren en ook voor kleine motoren om machinegereedschap te stimuleren.
(b) Aankte poolmethode: de methode voor verandering van pool voor de regeling van de snelheid van de driefasige inductiemotor die hierboven is beschreven in (a) dwz de methode om de multiple stator te wikkelen, wordt alleen in kleine motoren gebruikt.
In grote motoren is het geschikter om een substantiële pooltechniek te gebruiken die de noodzaak elimineert om verschillende statorwikkelingen te hebben om het aantal statorcentra te wijzigen.
Deze motorbesturingsmethode met drie fasen gebruikt de hele wikkeling voor elke snelheid. Normaal gesproken worden de opeenvolgende spoelgroepen voor een motor met één snelheid opgerold om achtereenvolgende polariteitscentra te creëren. Dit wordt geïllustreerd in figuur 1.83, waar een fase van een wikkeling met vier pool wordt ontwikkeld.
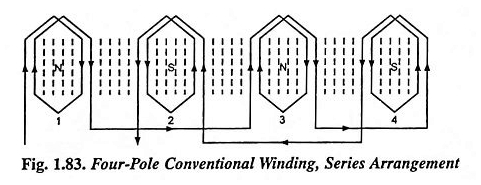
Opgemerkt moet worden dat alle spoelen in serie zijn, maar dat de uiteindelijke verbindingen zijn vastgesteld met alternatieve groepen, dat wil zeggen, groep 1 in groep 3 en groep 4 in groep 2.
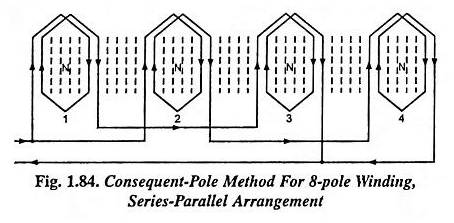
Nu kunnen de laatste verbindingen van de groepen, met dezelfde spoelen, worden aangepast om opeenvolgende spoelen van dezelfde polariteit te hebben, zoals geïllustreerd in figuur 1.84.
Parallel aan de serieverbindingen van groepen 2-4 met deze groepen 1-3, is de polariteit van groepen 2 en 4 veranderd, zodat er nu vier opeenvolgende noordelijke polen zijn.
Als gevolg van deze zuidelijke polen worden gemaakt tussen elk van de noordelijke polen, en de motor heeft nu een wikkeling van 8 pool.
Aldus geeft de opstelling van de serie voor een voeding van 50 H
Het is ook mogelijk om een seriële parallelle opstelling te gebruiken voor een wikkeling van 4 pool en vervolgens naar de serie te bewegen voor 8 -poolwikkeling. Een circuit om een kronkeling met drie fasen van de wikkeling van 2 tot 4 post te veranderen, wordt geïllustreerd in figuur 1.85.
Door alle groepen spoelen opnieuw te verbinden voor dezelfde polariteit, werkt de stator alsof hij twee keer zoveel palen had als de groepen polen. De aldus gecreëerde extra polen worden de substantiële polen genoemd en wikkeling staat bekend als een opeenvolgende postwikkeling.
Door een enkele schakelopstelling is het mogelijk om de standaard (of conventionele) verbinding te hebben aan één kant van een dubbele lanceringsschakelaar en de verbinding van de substantiële post aan de andere kant van de schakelaar.
Aldus kunnen twee snelheden worden verkregen, hogere snelheid met conventionele verbinding en de halve afdruk met een substantiële verbinding met pool.

In motoren die de substantiële pooltechniek gebruiken voor snelheidsregeling, wordt het best mogelijke ontwerp over het algemeen niet verkregen met beide snelheden.
Met andere woorden, de gewenste kenmerken, zoals de hoge vermogensfactor, worden met een snelheid opgeofferd zodat een redelijk goede vermogensfactor wordt verkregen met de andere snelheid.
Soms zijn de statorverbindingen van Delta naar de ster gegaan, terwijl de Post -verbindingen worden gewijzigd. Dit verandert de spanning en maakt een betere motor mogelijk bij elke snelheid.
Twee snelheidsmotoren worden over het algemeen vervaardigd met een wikkeling op de stator, het aantal polen dat wordt gewijzigd in de verhouding 1: 2. De drie en vier snelheidsmotoren zijn voorzien van twee wikkelingen op de statistieken, een of beide worden vervaardigd door het aantal polen te wijzigen.
Indien gewenst om een motor te verkrijgen voor vier synchrone snelheden; 1500, 1.000, 750 en 500 tpm, twee wikkelingen moeten op de stator worden geplaatst, waarvan er één 4 en 8 palen geeft en de andere 6 en 12 polen geeft.
Met behulp van een parallelle verbinding in reeks individuele fasegroepen kunnen de fasen zelf worden verbonden in de ster / delta, wat leidt tot werking met twee versnellingen met de drie soorten koppelsnelheidseigenschappen, namelijk constant koppel, constant vermogen en variabel koppel.
Vanwege complicaties in het ontwerp en het omschakelen van de statorwikkeling, is het niet mogelijk om meer dan vier snelheden voor elke motor te verkrijgen dankzij deze snelheidscontrolemethode. Deze methode biedt ook geen progressieve snelheidsregeling.
Daarom wordt deze methode niet gebruikt voor snelheidsregels voor algemeen gebruik.
Deze methode is echter zeer bevredigend voor applicaties, zoals ventilatietans, transportbanden, machine -tools of andere toepassingen die slechts twee of vier ongeveer constante werking vereisen die het zal bieden.
Deze methode heeft het voordeel van eenvoud, goede snelheidsregulering voor elke aanpassing, hoge efficiëntie en matige initiële kosten en onderhoud.
Het aantal paren van polen op de stator kan ook worden gewijzigd met behulp van de amplitudemodulatietechniek van de polen – een techniek van modulatie van verwijderde portichouders.
Deze methode voor wijziging van post heeft het voordeel dat de verhouding van de twee beschikbare snelheden niet noodzakelijkerwijs 2: 1 moet zijn zoals in de substantiële poolmethode.
4. Statorimpedantiebeheersing
Een verminderde spanning bij de machine -terminals kan worden verkregen door gebalanceerde weerstand of inductanties in serie met elke statordraad in te voegen. Onder dergelijke omstandigheden wordt de motorstermijnspanning afhankelijk van de motorstroom en verandert de spanning met de versnelling van de motor. De kenmerken van het koppel met typische snelheid worden geïllustreerd in figuur 1.86.
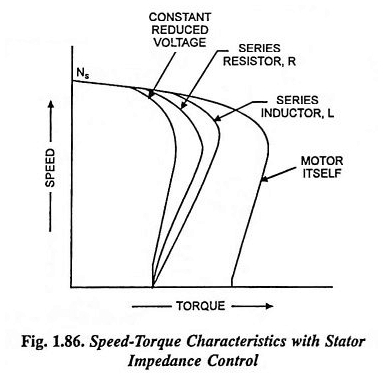
Als de impedantie (r of x) wordt aangepast om hetzelfde startkoppel te bieden, zou het kenmerk van de kuikensnelheid in het geval van een toevoeging van inductantie een groter koppel hebben dan met extra weerstand.
Bovendien stellen deze twee kenmerken ons in staat om grotere paren te hebben dan die verkregen met het kenmerk met een verminderde toegepaste spanning, voor hetzelfde startkoppel.
Het invoegen van weerstand in het statorcircuit verbetert de vermogensfactor, maar tegen de prijs van grotere energieverliezen.
5. Snelheidsregeling door variatie in rotorweerstand (of rotorweerstandsregeling)
De wortelmotoren van de wonden worden in het algemeen gelanceerd door de verbinding van de startweerstanden in het secundaire circuit, die in fasen worden kortgesloten terwijl de motor versnelt.
Als de ohmswaarden van deze weerstanden correct zijn gekozen en als deze weerstanden zijn ontworpen voor continue werking, kunnen ze worden gebruikt voor dubbel doel, om de snelheid te starten en te regelen. Ook duidelijk, deze methode kan worden toegepast op rotormotoren alleen opgerold.
De zachtheid van snelheidsregeling hangt af van het aantal fasen van de beschikbare weerstanden. De bediening wordt gegeven in de richting van de basissnelheid. Het snelheidsbereik is niet constant en hangt af van de waarde van de belasting.
Deze snelheidscontrolemethode heeft kenmerken die vergelijkbaar zijn met die van Shunt DC -motortoerental door middel van serieweerstand met het frame. De belangrijkste nadelen zijn een lagere efficiëntie en een slechte snelheidsregulering vanwege de toename van de rotorweerstand tegen lage snelheidsinstellingen.
Bij bijvoorbeeld 50% van de synchrone snelheid is de effectiviteit van de rotor bijvoorbeeld slechts 50% en zou de efficiëntie van de motor iets minder zijn. De snelheidsvariatie is beperkt tot een bereik van slechts 50 tot 100%.
Vloeibare reostaten hebben de voorkeur aan metalen reostaten omdat ze geen inductie hebben en de weerstanden voorzichtig kunnen worden gesneden door een uniform koppel te geven.
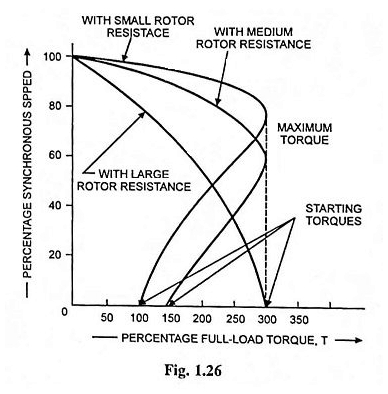
De introductie van externe weerstanden in het rotorcircuit van een inductiemotor met schuifring zal de snelheidsplot-kenmerken wijzigen zoals geïllustreerd in figuur 1.26.
Deze drie -fasen inductiemotorbesturingsmethode als zodanig is daarom niet geschikt om de snelheid naar een constant koppel te regelen.
Maar deze methode wordt veel gebruikt voor belastingen waarbij het vereiste paar aanzienlijk valt naarmate de snelheid wordt verlaagd, zoals ventilatorbelastingen waarvoor de invoerinvoer aanzienlijk daalt wanneer de snelheid wordt verlaagd, wat op zijn beurt de koperen verliezen van de rotor vermindert.
Bovendien wordt deze methode niet gebruikt voor continue snelheidsregeling, maar heeft de voorkeur voor intermitterende werking (korte tijd). Een dergelijke snelheidscontrolemethode wordt in de praktijk veel gebruikt, voor motoren met lage kracht en in luchtkranen.
Het wordt echter soms gebruikt voor de regulering van de snelheid van de rollen, met name waar ze worden voorzien van ruches om de laadpieken in het circuit te verminderen.
Hier is de reostaat, de cruise control genoemd, automatisch ingeschakeld wanneer de belasting toeneemt en daarom wordt de snelheid afgenomen en wordt een deel van de belasting gecompenseerd ten koste van de kinetische energie van het stuurwiel.
Omgekeerd, wanneer de belasting afneemt, wordt de weerstand tegen het rotorcircuit verminderd; De snelheid neemt toe en het stuur begint kinetische energie op te slaan.
6. Secundaire buitenlandse spanningscontrole
In deze methode wordt de snelheid van een inductiemotor geregeld door een schuiffrequentiespanning in het secundaire circuit te injecteren.
Als de geïnjecteerde spanning in lijn is met de EMF -induceert in het secundaire circuit, is deze gelijk aan een afname van de weerstand in het secundaire circuit, daarom neemt de verschuiving af of neemt de snelheid toe.
Het is mogelijk om super synchrone snelheden te bereiken door een schuiffrequentiespanning in fase te injecteren met de CMF geïnduceerd in het rotorcircuit.
Als de geïnjecteerde spanning zich in de oppositiefase tegen de EMF in het secundaire circuit induceert, is deze gelijk aan het vergroten van de weerstand in het secundaire circuit, wat resulteert in een toename van het glijden of een snelheidsverlaging.
Aldus is een breed scala aan snelheidsregeling mogelijk door deze methode door frequentieconversieapparatuur in het rotorcircuit op te nemen.
Bij deze methode worden de nadelen van lagere efficiëntie en slechte snelheidsregulering overwonnen, maar het vereist één en over het algemeen meer hulpmachines om een schuiffrequentie -EMF in het secundaire circuit te injecteren, daarom is het duurder en wordt het gebruikt met zeer grote nootmotoren, zoals voor motoren in stalen molens.
Verschillende methoden zijn ontwikkeld om de snelheid van inductiemotoren te regelen door een schuiffrequentiespanning in het secundaire circuit te injecteren.
De verschillende methoden variëren in hun vereisten voor hulpapparatuur; Van de opname van de hulpapparatuur in het ontwerp van de inductiemotor zelf tot een vrij gecompliceerd systeem van hulproterende machines en verstelbare verhouding transformatoren.
Het basiscriterium dat een dergelijk systeem moet vullen, is: (i) dat de variabele buitenlandse spanning een glijdende frequentie heeft, dat wil zeggen een frequentie die gelijk is aan SF en (ii) dat de energie geassocieerd met de buitenlandse spanning kan worden hersteld.
De meest voorkomende systemen gebaseerd op dit principe zijn Kramer -systeem, Leblanc System en Scherbius -systeem van snelheidscontrole van polyfase -inductiemotoren.
7. Snelheidsregeling door concatenatie
In deze methode zijn twee motoren nodig, waarvan ten minste één een wondrotor moet hebben. De twee motoren kunnen mechanisch worden gekoppeld om een gemeenschappelijke belasting te veroorzaken.
Als de wikkeling van de stator van een van hen, een wondrotormotor, is verbonden met de drie -fasen AC -voeding en de rotorwikkeling is verbonden met de wikkeling van de tweede motorstator, wordt de snelheid van de combinatie bepaald door de som of het verschil in het aantal polen in de twee machines.
In de praktijk is het gebruikelijk om de rotoruitgang van de eerste machine van de stator van de tweede machine op zodanig te verbinden dat de draaivelden van de twee in dezelfde richting zijn; In deze toestand wordt de resulterende snelheid bepaald door de volgende uitdrukking.

Of
- F is de voedselfrequentie,
- P1 en P2 zijn het aantal palen op respectievelijk machines I en II.
Om een snelheid te verkrijgen, boven normaal, wordt het koppel van de tweede motor omgekeerd door eenvoudig twee van de schroefdraden van de tweede motor te wijzigen. Dit wordt de differentiële waterval genoemd en zal onder deze toestand van de conditie worden gegeven door de uitdrukking.

Een extra snelheidsregeling, als u wilt, kan worden verkregen door ook een tweede machinetype machine te hebben en de besturingsweerstand in het rotorcircuit van de tweede machine in te voegen.

Als de twee motoren hetzelfde aantal polen hebben en zijn verbonden in cumulatieve cascade [Vgl. (1.77)], ze zullen bijna de helft werken. Omdat het koppel van de boom grotendeels wordt verminderd in differentiële cascade, wordt het in de praktijk niet gebruikt.
De mechanische uitgang van de twee machines is ongeveer in het rapport van

of P1: P2, dat wil zeggen in de verhouding van het aantal polen op de machines.