Dynamische inductiemotorrem (of reostatisch remmen):
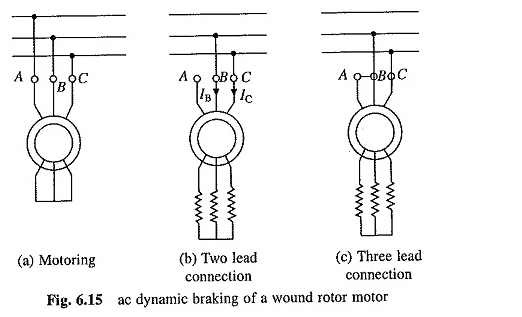
(A) AC -dynamische rem – Dynamisch AC -rem van de inductiemotor wordt verkregen wanneer de motor wordt uitgevoerd op een enkele fase voeding door een brongase los te koppelen en deze open te laten (Fig. 6.15 (b)) of door deze te verbinden met een andere machinefase (Fig. 6.15 (c)).
De twee vijgenverbindingen. 6.15 (b) en (c) worden respectievelijk twee en drie loodverbindingen genoemd. Wanneer aangesloten op een 1 -fasevoeding, kan de motor worden beschouwd als aangedreven door een positieve en negatieve volgorde in drie fasen van spanningen.
Het netto koppel dat door de machine wordt geproduceerd, is een som van paren vanwege positieve en negatieve sequentiebeperkingen. Wanneer de rotor een hoge weerstand heeft, is het netto koppel negatief en wordt de rembewerking verkregen. De motoranalyse voor twee en drie loodverbindingen wordt als volgt gemaakt:
Twee leadverbindingen: Stel dat fase A van een motor die in Y daar in Open Circuit is aangesloten. Dan ia = 0 en ic = -Ib. Bijgevolg worden de componenten van positieve en negatieve volgorde IP en in respectievelijk gegeven door

waar α wordt gegeven door de vergelijking. (6.17).
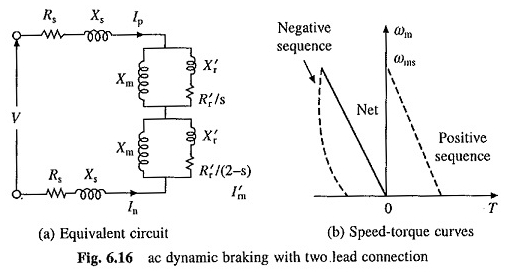
Aangezien de positieve en negatieve reekscomponenten gelijk en tegengesteld zijn, kunnen twee equivalente circuits worden verbonden met de serie -oppositie. De spanning die op deze seriële combinatie moet worden toegepast, zal zijn

Met een toegepaste spanning JVBC / √3 Als de stroom IP = – in = jib / √3 is, volgt deze alleen met een toegepaste fasespanning V, de stroom zou ib / √3 zijn. Het equivalente circuit kan daarom worden getekend zoals weergegeven in figuur 6.16 (a).
Hoewel de waarden van de positieve en negatieve sequentiecomponenten van de stroom gelijk zijn, zijn de overeenkomstige paren dat niet. De aard van de snelheidssnelheidcurves voor positieve en negatieve sequentiesstromen en netto koppel worden weergegeven in figuur 6.16 (b).
Door de juiste keuze van rotorweerstand kan het remkoppel worden verkregen over het snelheidsbereik. Omdat de weerstand tegen de vereiste rotor groot is, kan het AC -dynamisch remmen van de inductiemotor alleen worden gebruikt in de wondrotormotoren.
In dit opzicht voor hoge snelheden (of lage glijdende waarden) wordt de impedantie van het deel van een positieve sequentiecomponent zeer hoog. Omdat de componenten van een positieve en negatieve volgorde van de stroom gelijk moeten zijn, is het netto remkoppel klein en is het remmen daarom niet erg effectief.
Verbinding met drie pellets: hier zijn twee fasen van de haspel van de aangesloten motor aangesloten Y parallel in serie verbonden met de derde fase (Fig. 6.15 (c)). Verlaat de fasen A en B

In tegenstelling tot twee loodverbindingen, is de grootte van de componenten van een positieve en negatieve volgorde van de spanning gelijk en niet de componenten van een positieve en negatieve volgorde van de stromen. Het equivalente circuit wordt geïllustreerd in figuur 6.17.
De delen van een positieve en negatieve volgorde van het circuit zijn onafhankelijk en daarom wordt geen beperking opgelegd aan de negatieve sequentiecomponent van de stroom door een positief sequentiegedeelte van het equivalent circuit.
Aldus worden hogere remparen verkregen (vergeleken met twee loodverbindingen) bij hoge snelheden. De aard van het kenmerk van de kuikensnelheid met deze verbinding is dezelfde als die van figuur 616 (b).
Elke ongelijkheid tussen de contactweerstanden in de verbindingen van twee fasen in parallel vermindert het remkoppel en kan zelfs leiden tot een automobielkoppel, omdat de conditie meer neigt naar twee loodverbindingen met een toenemende weerstand in een van de twee fasen (zoals de weerstand tegen de gebruikte rotor is lager dan de verbinding met twee lood).
Bijgevolg heeft de verbinding met twee lood over het algemeen de voorkeur ondanks het zwakke koppel. De belangrijkste remmende toepassing met één fase is de kraanhoogte.
(b) Zelfverzameld remmen met condensatoren: in deze methode worden drie condensatoren constant verbonden via de motorterminals. De waarden van de condensatoren worden aldus gekozen als wanneer ze worden losgekoppeld van de lijn, de motor werkt als een zelf-geëxciteerde inductiegenerator.
De remverbinding wordt weergegeven in figuur 6.18 (a) en het zelfverklaringsproces wordt uitgelegd in figuur 6.18 (b) zonder ladingsconditie. Curve A is geen machinemagnetisatiecurve van de machine met een gegeven snelheid, en lijn B vertegenwoordigt de stroom door condensatoren, gegeven door
![]()
waarbij E de stator is die door de stator per fase wordt geïnduceerd.
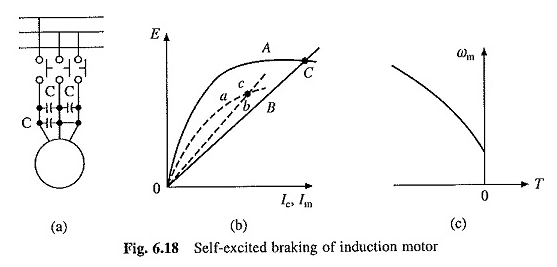
Condensatoren bieden de reactieve stroom die nodig is voor opwinding. De bewerking vindt plaats op punt C, wat de kruising is van twee kenmerken. Wanneer de snelheid daalt, daalt de waarde van E voor dezelfde magnetisatiestroom en wordt het nieuwe kenmerk van magnetisatie A verkregen.
Aan de andere kant neemt de helling van het kenmerk E tegen IC toe door een nieuw kenmerk te geven. De kruising van twee curven vindt nu plaats c. Aldus neemt de vermindering van de snelheid, terwijl de magnetisatiecurves naar beneden verplaatst, de helling van de condensatorspanning versus de stroomcurve neemt toe.
Met een bepaalde kritieke snelheid, die over het algemeen hoog is, komen twee curven niet bijeen en de machine treft zichzelf niet op en het remkoppel daalt tot nul. Het kenmerk van de zelf-geëxciteerde remsnelheid wordt weergegeven in figuur 6.18 (c).
Soms zijn externe weerstanden verbonden op de statorterminals om het remkoppel te vergroten en om een bepaalde energie buiten de machine te verdrijven. De constructie van figuur 6.18 (b) is alleen geldig voor elke lading.
Voor een meer precieze analyse moet rekening worden gehouden met de vermindering van motorimpedantie. Dit diagram wordt zelden gebruikt, omdat het remkoppel naar nul valt met een snelheid die over het algemeen hoog is.
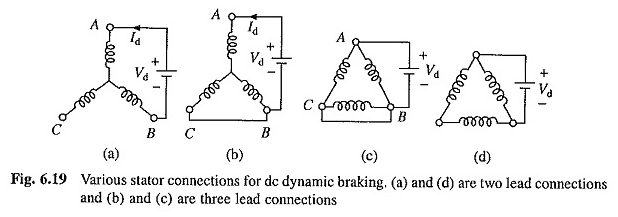
(C) Dynamische rem CC: het wordt verkregen wanneer de stator van een inductiemotor die met een snelheid werkt, is verbonden met een directe voeding. Twee veelgebruikte verbindingen, twee en drie lood, voor ster- en delta -verbindingen worden weergegeven in figuur 6.19.
Een methode voor het verkrijgen van DC -voeding met behulp van een diodebrug voor twee leadverbindingen wordt geïllustreerd in figuur 6.20.
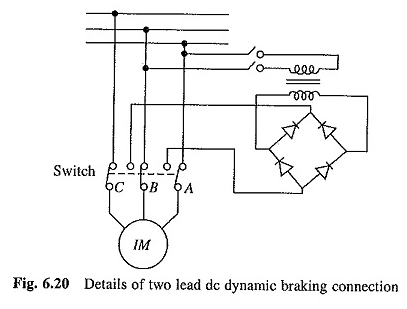
De CC -stroom die de stator kruist, produceert een stationair magnetisch veld. De beweging van de rotor in dit veld induceert een spanning in de rotor van de rotor. De machine werkt daarom als generator.
De gegenereerde energie wordt gedissipeerd in de weerstand tegen het rotorcircuit, waardoor dynamisch remmen van de inductiemotor worden gegeven.
Aangezien het veld stationair is, is de relatieve snelheid tussen rotordrivers en het veld nu ωm. De geïnduceerde spanningsfrequentie is gelijk aan de frequentie van de spanning van de bron Ca (of de frequentie van de nominale motor) wanneer ωm = ωms.
Of de spanning geïnduceerd in de rotor tijdens de race met een synchrone snelheid. Wanneer het werkt met een snelheid ωm, worden de geïnduceerde spanning en de frequentie ervan respectievelijk Ser en SF. DUS

Dit geeft een equivalent circuit in de fase van figuur 6.21 (a) voor de rotor. De verdeling van alle hoeveelheden door S zal een circuit produceren dat gelijkwaardig is aan de nominale frequentie.
In verwijzing naar verschillende equivalente circuitparameters, aldus verkregen uit de statortorens, geeft een equivalent circuit in de fase van de rotor geïllustreerd in figuur 6.21 (b). Het equivalente circuit van de stator onder het dynamische DC -remmen van de inductiemotor wordt geïllustreerd in figuur 6.21 (c).
Om te combineren met een equivalent rotorcircuit in figuur 6.21 (b), moeten we eerst een equivalent circuit per fase van de stator bij de nominale frequentie verkrijgen. Equivalent circuit Fig. 6.21 (c) suggereren dat de stator MMF constant en onafhankelijk is van snelheid.
We stellen ons daarom voor dat de stator wordt aangedreven door een evenwichtige stroombron van drie fasen van nominale frequentie, wat een fasestroom oplevert. De huidige CA is gelijk aan ID, op voorwaarde dat het stator MMF van dezelfde amplitude produceert als de CC -huidige ID.
Aldus vervangen we een stationaire MMF -stator geproduceerd door CC -stroom -ID door een MMF (geproduceerd door IS) van identieke amplitude maar roterend met synchrone snelheid.
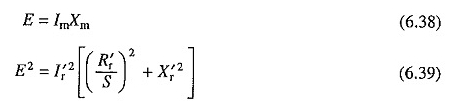
Het verschil van deze twee MMF’s zal een MMF van de luchtpartijen zijn die verantwoordelijk zal zijn voor de productie van luchtkloven die op zijn beurt de spanning van de nominale frequentie in de stator veroorzaakt. Het equivalente circuit in de statorfase bij de nominale frequentie neemt dus de geïllustreerde vorm in figuur 6.21 (d).
Het combineren van equivalente circuits van Fig. 6.21 (6) en (d) en de intrekking van de transformator geeft een nominale frequentie door circuitequivalent in fase (Fig. 6.21 (e)).

Het is klein voor kleine s, en daarom benadert ik. Vanwege een hoge waarde van instant messaging is het magnetische circuit verzadigd. XM is dus niet constant maar varieert met IM. Voor een precieze analyse moet rekening worden gehouden met de variatie van XM met IM.
De relatie tussen IS en ID hangt af van de verbinding van de stator. Laten we het bijvoorbeeld afleiden voor de twee loodverbindingen in figuur 6.19 (a). Hier ia = id en ib = – id.
Als N een effectief aantal beurten is in elke wikkeling, zal de maximale MMF geproduceerd door de A-fase IDN zijn en de maximale MMF geproduceerd door fase B (-IDN). Ervan uitgaande dat deze MMF’s sinusoïdaal in de ruimte zijn verdeeld, zal het resultaat van de resulterende MMF zijn
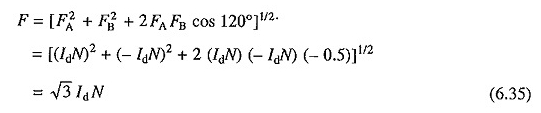
Wanneer de machine wordt aangedreven door een uitgebalanceerde stroombron met drie fasen, is de stator MMF -piek

Is gelijk aan ID wanneer f = f ‘. Daarom uit vergelijkingen. (6.35) en (6.36)
![]()
De waarden van zijn voor andere verbindingen (Fig. 6.19 (b), (c) en (d), respectievelijk) zijn:
![]()
Het kenmerk van de Torca -snelheid wordt als volgt berekend.
Uit het equivalente circuit van figuur 6.21 (e)
Overweeg de verdeling van stromen tussen de parallelle takken gevormd door XM en de rotor

Aftrekking van de vergelijking. (6.39) van (6.40) levert

Van de vergelijking (6.39)

Het motorkoppel is

Omdat XM afhankelijk is van de IM, Eqs. (6.38) – (6.42) zijn niet -lineaire algebraïsche vergelijkingen. Het gebruik van de volgende stappen vermijdt de noodzaak van een digitale oplossing. Stel dat een IM -waarde E. verkrijg dat overeenkomt met het magnetisatiekarakteristiek, XM berekenen uit de vergelijking.
(6.38), haal de R van (6.41), bereken s van (6.42) en vervolgens ωm en t van de vergelijkingen. (6.34) en (6.43), respectievelijk.
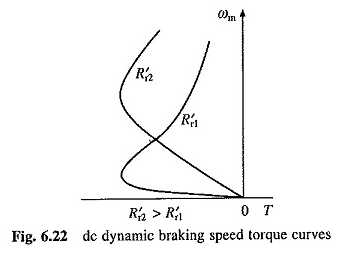
Figuur 6.22 toont de aard van de snelheidskoppelcurves voor twee rotorweerstandswaarden. In een eekhoornkooi -motor of een wondwoodrotormotor zonder externe weerstand in de rotor, treedt het maximale koppel op bij lage snelheid.
Terwijl het maximale koppel onafhankelijk is van de rotorweerstand, neemt de snelheid waarmee het maximale koppel optreedt, met de weerstand tegen de rotor. Wanneer Fig.
6.22 DC Dynamisch remmen van inductiemotorsnelheid paar Curves snel remmen is noodzakelijk, sensationele weerstand is verbonden in het rotorcircuit en het wordt gesneden naarmate de snelheid daalt.
Bij gebruik om een actieve belasting te behouden, zoals bij mijnwinderers, is een hoge weerstand verbonden om versnellingscurves te verkrijgen met een negatieve helling, om stabiliteit in de evenwichtstoestand te waarborgen.
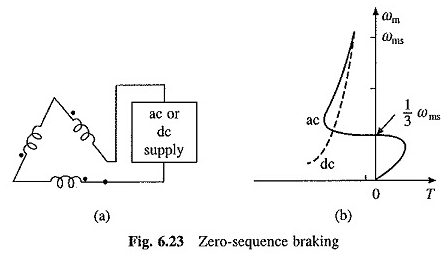
(d) Nul -sequentievrij: in dit remmen zijn drie statorfasen in serie verbonden via een enkele fase AC of een CC -bron zoals weergegeven in figuur 6.23 (a). Een dergelijke verbinding staat bekend als een nul-sequentieverbinding, omdat de stromen in alle hoogtepunten van de stator co-platform zijn.
De MMF veroorzaakt door co-country stromen (of nulsequentie) produceert een magnetisch veld driemaal het aantal polen waarvoor de machine echt is opgerold. Met een AC -voeding is het resulterende veld stationair in de ruimte en gaat het naar de frequentie van de voeding.
Met de DCE -voeding is het resulterende veld stationair in de ruimte en is het van constante grootte. Een belangrijk voordeel van deze verbinding is de uniforme belasting van alle statorfasen. De aard van de snelheidssnelheidcurven voor AC- en CC -voeding wordt geïllustreerd in figuur 6.23 (b).
Met de toevoer van wisselstroom kan remmen alleen worden gebruikt tot een derde van de synchrone snelheid. Remparen die door deze verbinding worden geproduceerd, zijn echter aanzienlijk groter dan de auto. De motor werkt voornamelijk in regeneratief remmen.
Voor lage -resistentie -motoren voor rotor wordt een belangrijk deel van de gegenereerde energie teruggewonnen. In tegenstelling tot het dynamische AC -remmen van de inductiemotor, vereist het geen hoge weerstand tegen rotor en kan daarom zowel worden gebruikt – met eekhoornmotoren en rotonmotoren.
Met de voeding is remmen beschikbaar gedurende het snelheidsbereik. Het is in wezen dynamisch remmen omdat alle gegenereerde energie wordt verspild aan rotorweerstand.
De schakelopstelling, van drie -fase werking tot normale nul, is uiterst eenvoudig wanneer de motor een delta -aangesloten stator heeft.