Inductiemotor georiënteerde regeling: inductiemotor:
In glijdende gecontroleerde schijven met behulp van VSI of CSI die in eerdere secties worden besproken, wordt de statorspanning of statorstroom geregeld met behulp van de slipfrequentie. Ze worden alleen in amplitude gecontroleerd.
Controle van de statorstroom ondersteunt zijn fasepositie niet in vergelijking met de stroom. Controle biedt geen bevredigend dynamisch gedrag. Er is een oscillerende reactie op veranderingen in de rotorfrequentie.
Het dynamische antwoord kan worden verbeterd met behulp van het principe van controle georiënteerd op de grond van de inductiemotor waar de statorstroom zowel in amplitude als in fasepositie wordt geregeld in vergelijking met de stroom.
Bij de regeling van de grondmotorgrond heeft de statorstroom de functie van het leveren van zowel stroom als koppel.
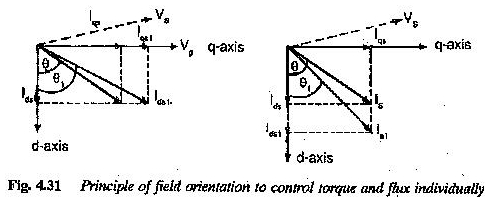
De inductiemotor zal een operatie hebben die vergelijkbaar is met die van een motor van als de statorstroomcomponenten, namelijk stroomproductie en koppelproductie worden afzonderlijk geregeld (Fig. 4.31).
Dit is eigenlijk het geval in een continue stroommotor waar het koppel afhankelijk is van de versterkingsstroom en de stroom op de veldstroom. Er is een ontkoppeling inherent tussen hen, maar voor de effecten van de reactie van het frame.
Deze effecten kunnen worden geëlimineerd door de wikkelingen te compenseren en er is een perfecte ontkoppeling in een opgewonden CC -motor afzonderlijk. Dit type ontkoppeling komt in de verleiding in het beheersen van inductiemotoren. Het principe wordt oriëntatie op de grond of controle van de vector genoemd.
Deze bediening verbetert de dynamische prestaties van de lezer met alle snelheden. De statorstroom wordt opgesplitst in twee componenten één langs de as D en de andere langs de as Q.
De referentieassen werden zodanig gekozen dat de rotorstroom volledig beschikbaar is langs de directe as. De kwadratuurcomponent is nul.
Aldus is de component van de stroom langs de as d de componentproducent van stroom en dat langs de as Q de producentcomponent van het koppel is. Door deze componenten onafhankelijk te variëren, kunnen we een onafhankelijke controle over de stroom en de controle van een paar hebben. Deze worden weergegeven in Fig.
4.31 (a) en (b). In de eerste wordt de variatie van de stroom aangegeven door een variabele directe ascomponent van de stroom, terwijl in de tweede de variatie van de component van de as Q van de stator wordt weergegeven.
Bijgevolg is de controle van de statorstroom niet alleen equivalent aan de variatie in zijn grootte, maar ook op zijn fasehoek. De methode wordt daarom vectorcontrole genoemd.
De vectoren besturingstechnieken die worden gebruikt om de constante luchtruimtestroom te behouden, geven een slechte dynamische kenmerken aan training, omdat het koppel de schuiffrequentie met een vertraging volgt. Technieken zijn ontwikkeld om de rotorstroom constant te houden.
In deze methoden volgt het paar zonder vertraging, waardoor het dynamisch gedrag wordt verbeterd. Een dynamiek van hoge kwaliteit is nodig voor de besturing die op grond van de inductiemotor wordt gebruikt die als actuator wordt gebruikt.
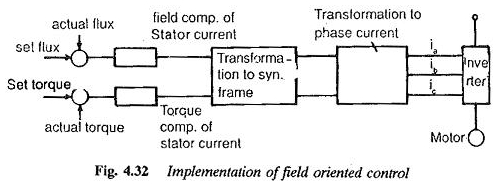
Figuur 4.32 illustreert de implementatie van het oriëntatieprincipe op de grond. De reële waarde van de rotorstroom wordt vergeleken met de referentiewaarde en de aldus verkregen fout wordt gebruikt om de directe ascomponent van de stroom te regelen.
Normaal gesproken wordt deze component constant gehouden zodat de rotorstroom constant is. De component van de kwadratuuras wordt geregeld met behulp van het foutsignaal verkregen uit de vergelijking van het echte koppel en het referentiekoppel. De componenten bevinden zich op het roterende raamwerk op een synchrone manier.
Bijgevolg vereist de ontkoppeling tussen de componenten van de productie van stromen en de productie van het koppel van de versterking een systeem van referentiecoördinaten en de transformatie van de hoeveelheden in dit referentiekader en uiteindelijk binnen het raamwerk van de stator,
In deze controle, die een zeer goed dynamisch gedrag biedt zonder een overgangspaarslag, is een secundaire stroom vereist, die op twee manieren beschikbaar kan worden gesteld:
1. Direct met behulp van stroomdetectiespoelen.
2. Indirecte schatting van de stroom met behulp van een machinemodel, met behulp van gemakkelijk meetbare terminale hoeveelheden, zoals spanningen en stromen.
De eerste methode met behulp van directe meting geeft goede resultaten en is waarschijnlijk de meest precieze besturingsmethode die beschikbaar is. De meting wordt uitgevoerd door middel van onderzoeksspoelen, halsondes of een andere techniek voor het meten van de stroom.
De gemeten stroom wordt gebruikt om de gereinigde ontkoppeling te maken tussen de componenten van de koppelproductie en de productie van de stroomstroomstroom. De methode is in wezen ongevoelig voor variaties in parameters. De kooi -motor verliest echter zijn robuustheid en zijn eenvoud van constructie.
Als we proberen de robuustheid en de eenvoud van de motor te behouden, wordt de stroom verkregen met behulp van de tweede methode. De rotorstroom wordt geschat op basis van de statorspanningsvector, de stroomvector en de rotorsnelheid. Deze geschatte stroom wordt gevoed met de koppelcontroller.
Deze benadering is gevoelig voor fouten in parameters. Rotorweerstand, lekken en andere parameters moeten worden bepaald met precisie om een prestatie -equivalent te bereiken voor directe meting.
Helaas worden de motorparameters die in de berekening worden gebruikt, bepaald uit vacuümtests en vertegenwoordigen ze niet de waarden van de parameters die daadwerkelijk aanwezig zijn op het werkpunt.
Bovendien variëren deze parameters aanzienlijk met verzadiging, temperatuur, frequentie en amplitude van de stroom. Het secundaire stroomniveau kan worden gewijzigd door de variatie in parameters. Deze variaties in parameters veroorzaken een onjuiste stroomregeling, die dynamische prestaties verslechteren.
Om fouten te voorkomen als gevolg van de variatie in parameterwaarden (voornamelijk rotorweerstand), hetzij vanwege een onjuiste schatting, of vanwege de bedrijfsomstandigheden, is de identificatie of aanpassing van automatische parameters gebruikt.
De methoden identificeren de wijzigingen in de prestaties vanwege de variatie van de parameters en corrigeren de parameters dienovereenkomstig.
De fout tussen de geschatte waarde van de stroom en de gewenste stroom in de motor wordt gebruikt om de meest invloedrijke parameter te corrigeren, wat de rotorweerstand is of de tijdconstante van de rotor, zodat het machinemodel de vereiste waarde van de stroom zonder enige fout geeft.
Een andere methode die recent is besproken, is een online techniek om de exacte waarde van de rotorweerstand van de inductiemotor vast te stellen. De identificatie wordt verkregen door een stroom van negatieve sequentie te injecteren en door de negatieve sequentiespanning te detecteren.
De waarde van de rotorweerstand wordt berekend met behulp van informatie. De bediening die op de grond van de inductiemotor is georiënteerd, corrigeert de waarde van de weerstand tegen de rotor zonder dat een thermische sensor nodig is.
De methoden van de feedback van staatswaarnemers worden ook gebruikt voor de identificatie van parameters.
Met de komst van microprocessors (μP’s) en microcomputers is het nu mogelijk om de problemen die verband houden met schijven met het trainingssysteem effectief op te lossen. De stroomvector kan heel gemakkelijk worden bepaald.
Om de matching van het motormodel en de identificatie van de rotorparameters door een correlatieprocedure uit te voeren, kunnen μP’s zonder enige extra maat zeer effectief zijn.
De μP’s vergemakkelijken ook de implementatie van geavanceerde algoritmen om schietreeksen van omvormer te genereren.
Bovendien is het proces dat is ontwikkeld in de veldgerichte besturing van het algemene trainingssysteem economisch haalbaar geworden, omdat de dure hardware die tot nu toe wordt gebruikt nu kan worden vervangen door software.
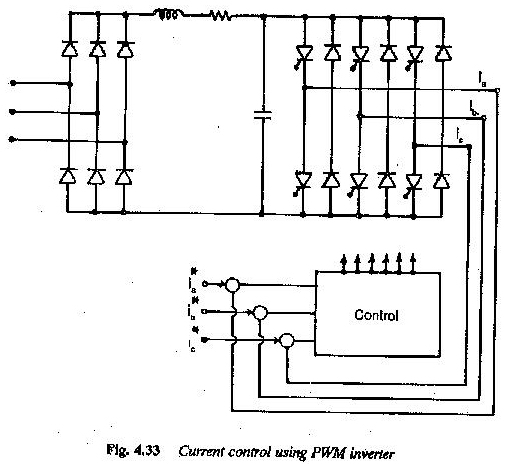
De oriëntatie van het veld kan zeer gemakkelijk worden geïmplementeerd met CSI die een bediening die op de motor van de inductiemotor wordt gericht, voedt. Omdat de PWM -omvormer een goed dynamisch gedrag heeft, worden deze gebruikt met een stroomregeling aan de zijkant van de uitgang.
Figuur 4.33 illustreert het principe van de huidige controle met behulp van de PWM -omvormer. Dit heeft de voordelen van VSI en CSI.
Inductiemotorbots in de modus van stromen van de stroom:
In het geval van continue stroommotoren worden snelheden boven de basissnelheid verkregen door de veldstroom te verminderen tot een constante integratiespanning. Het echtpaar ontwikkelde dalingen. Een constante vermogensmodus kan worden uitgevoerd in dit snelheidsbereik en wordt de stroom van de stroom genoemd.
Soortgelijk gedrag kan worden waargenomen in het geval van inductiemotoren. De spanning bereikt zijn nominale waarde voor de nominale frequentie. Voor frequenties boven deze waarde wordt de spanning van de spanner constant gehouden. Het motortoerental neemt toe in verhouding tot de frequentie.
Vanwege de toename van de frequentie neemt de luchtruimte af. Het koppel bij een gegeven rotorfrequentie is omgekeerd evenredig met het kwadraat van de statorfrequentie en het ontwikkelde vermogen is niet constant. Dynamisch gedrag onder verzwakte stroomomstandigheden is erg slecht. Dit kan worden verbeterd door een variabele schuiffrequentie voor maximale koppel die evenredig is aan de frequentie.
Een motor met een huidige voeding heeft een goed dynamisch gedrag wanneer er een reservespanning is over de omvormer.
Zodra een bepaalde hogere frequentiewaarde is bereikt, is de achterste EMF van de motor gelijk aan de toegepaste spanning en is er geen reservespanning voor stroomregeling.
De werkelijke waarde van de stator- en rotorstroom loopt weg van de gewenste waarden en de lezer heeft een dynamisch slecht gedrag. Verbetering van de dynamische motorprestaties in de Land -verzwakkingsmodus is een interesseprobleem.
Dit kan worden gedaan door de amplitude van de rotorflux en dus de achterste EMF te regelen, zodat een voldoende spanningsreserve beschikbaar is in het snelheidsbereik boven de basissnelheid. Ook hier kunnen directe en indirecte methoden voor stroomcontrole worden gebruikt.