Draft Power Recovery Scheme gebruikt in de inductiemotor:
Schuifvermogen herstelschema gebruikt in de inductiemotor – Figuur 6.53 toont een equivalent circuit van een inductiemotor van de wondrotor met een spannings -VR geïnjecteerd in zijn rotor, ervan uitgaande dat de stator -rotorverhouding van bochten. Wanneer het koperverlies van rotor wordt verwaarloosd
![]()
waarbij PR het vermogen is dat wordt geabsorbeerd door de VR -bron. De amplitude en het teken van PR kunnen worden geregeld door de grootte en de VR -fase te regelen. Wanneer PR nul is, werkt de motor op zijn kenmerk van het natuurlijke snelheidskoppel.
Een positieve PR zal PMS verminderen en daarom zal de motor met een lagere snelheid voor hetzelfde koppel werken. Wanneer PR gelijk is aan PG, PM en daarom zal de snelheid nul zijn. Aldus zal de variatie van PR van 0 tot PG de snelheid van synchrone snelheid met nulsnelheid mogelijk maken. De polariteit van de VR voor deze bewerking wordt weergegeven in figuur 6.53 door een continue lijn.
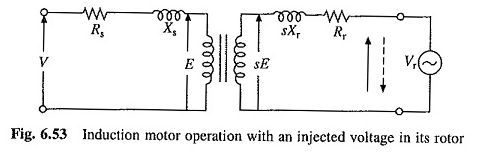
Wanneer PR negatief is, werkt IE VR als een stroombron, PM zal groter zijn dan PG en de motor werkt met een snelheid hoger dan synchrone snelheid. De polariteit van de VR voor snelheidsregeling boven de synchrone snelheid wordt weergegeven door een stippellijn in figuur 6.53.
Wanneer het koperverlies van rotor wordt verwaarloosd, is PR gelijk aan het schuifvermogensherstelschema dat wordt gebruikt in de inductiemotor, SPG. Snelheidscontrole onder de synchrone snelheid wordt verkregen door het schuifvermogen te regelen. Dezelfde benadering werd overgenomen bij de controle van de rotorweerstand.
In plaats van het vermogen te verspillen aan externe weerstanden, wordt het hier echter nuttig gebruikt. Bijgevolg worden deze snelheidscontrolemethoden geclassificeerd als een schuifvermogensherstelschema dat wordt gebruikt in de herstelpatronen van de inductiemotor. Twee van deze patronen, de statische Sherbius en Kramer’s statische training worden hier beschreven.
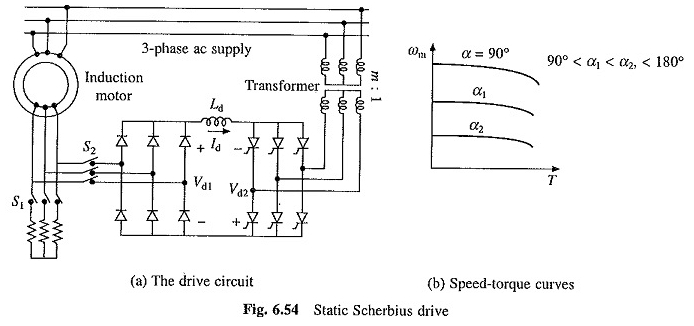
Drive de Scherbius static (Fig. 6.54 (a)):
Het biedt snelheidsregeling van een wondrotormotor onder synchrone snelheid. Een deel van de AC -kracht van de rotor wordt door een diodebrug omgezet in CC. De gecontroleerde gelijkrichter die werkt als een omvormer converteert het naar AC en retourneert het naar de AC -bron. De macht is teruggestuurd (dat wil zeggen
PR) kan worden gecontroleerd door de EMF VD2 -omvormer te regelen, die op zijn beurt controller is door de spannerhoek te regelen. De CC -bindingsinductantie wordt verstrekt om de rimpel in de huidige CC -link te verminderen.
Aangezien het herstelschema van het glijdende vermogen dat in de inductiemotor wordt gebruikt, aan de bron wordt gegeven, in tegenstelling tot de regeling van de rotorweerstand waar het in weerstand wordt verspild, heeft het rijden veel efficiëntie.
De lezer heeft een hogere efficiëntie dan statorspanningsregeling door AC -spanningscontrollers om dezelfde redenen.
De stroomvoorziening van de rijingang is het verschil tussen motorinvoervermogen en geretourneerd vermogen. Het reactieve ingangsvermogen is de som van de reactieve krachten van de motor en de omvormer. Daarom heeft de schijf een slechte vermogensfactor over het strand van zijn werking.
In figuur 6.54 (a), het verwaarlozen van de stator en de druppels rotor

Waar α de schiethoek van de omvormer is en N en M respectievelijk de stator / rotorverhouding van bochten van de motorverhouding en zijde van de bron zijn met de converter van de bochten op de transformator. De val door de inductor verwaarlozen
![]()
Vergelijkingen vervangen. (6.93) en (6.94)

waar a = n / m.
De maximale waarde van α is beperkt tot 165 ° voor een veilige omschakeling van de thyristors van de omvormer. De verschuiving kan worden gecontroleerd van 0 tot 0,966A wanneer α van 90 naar 165 ° ging. Door de juiste keuze van A kan het vereiste snelheidsbereik worden verkregen.
De transformator wordt gebruikt om overeen te komen met VD1- en VD2 -spanningen. Op de laagste snelheid van de lezer heeft VD1 de maximale Vd1m -waarde gegeven door
![]()
waar smax de waarde is van het glijden op de laagste snelheid. Als α beperkt is tot 165 °, wordt m zodanig gekozen dat de spanning van de omvormer een Vd1m -waarde heeft wanneer α 165 ° IE is

Een dergelijke keuze van M zorgt ervoor dat het functioneren van de omvormer bij de hoogste schiethoek met de laagste motorsnelheid, waardoor de hoogste vermogensfactor (eqn. (5.109)) en het laagste reactieve vermogen met de laagste snelheid wordt gegeven.
Dit verbetert de vermogensfactor in de pijp en vermindert het reactieve vermogen tot alle snelheden van het snelheidsbereik van de lezer.
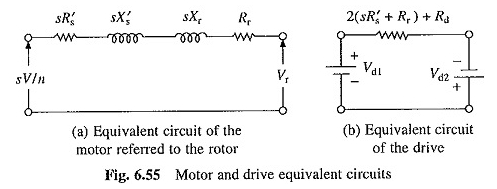
Figuur 6.55 (a) toont een equivalent motorcircuit dat naar de rotor verwijst, waarbij de magnetisatietak wordt verwaarloosd. Vergelijkingsafleiding. (6.90) laat zien dat wanneer verwezen naar de DC -link, de weerstand (SR’s + RR) 2 zal zijn (SR’s + RR). Dit geeft een equivalent circuit CC bij benadering van de lezer (Fig.
6.55 (b)), waarbij vd1 en vd2 in de vergelijkingen worden gegeven. (6.93) en (6.94). RD is de weerstand van de DC -verbindingsinductantie. Het equivalente circuit negeert schakelaar over de diodebrug. NU

Als het verlies van koper van de rotor wordt verwaarloosd
De aard van de snelheidskoppelcurves wordt weergegeven in figuur 6.54 (6).
De lezer heeft toepassingen in de ventilatorschijven en de pomp die alleen snelheidsregeling in een smal bereik vereisen. Als de maximale glijden wordt aangegeven door SMAX, dan kunnen de vermogensbeoordelingen van de diodebrug, de omvormer en de transformator slechts Smax -maal zijn, het vermogen van de motor (vergelijking 6.97).
Wanneer bijvoorbeeld de snelheid onder de synchrone snelheid moet worden verlaagd met slechts 20%, zullen de vermogensbeoordelingen van de diodebrug, de omvormer en de transformator slechts 20% van het vermogen van de motor zijn. Daarom heeft Drive lage kosten.
De lezer wordt gestart door de weerstand te regelen met S1 gesloten en S2 open (Fig. 6.54). Wanneer de snelheid het bedieningsbereik van de lezer bereikt, is S2 gesloten om de diodebrug aan te sluiten en wordt de omvormer geactiveerd. Nu staat S1 open om weerstand te elimineren.
Bij fans en pomptraining is remmen niet nodig, omdat de vloeistofdruk voldoende remkoppel biedt. Om een constante vloeistofstroom te behouden met variaties in de drukkop en de aard van de gepompte vloeistof, wordt de lezer gebruikt met gesloten lussnelheidsregeling.
Een besturingsschema van de slotlussnelheid met de regeling van de interne stroom wordt geïllustreerd in figuur 6.56. Het werkt op dezelfde manier als het diagram van figuur 3.5.
Deze schijf wordt veel gebruikt in middelgrote en hoge ventilator- en pomptraining (tot ongeveer 10 MW), vanwege hoge efficiëntie en lage kosten.
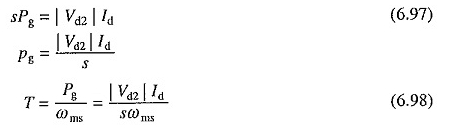
Deze schijf biedt constante koppelregeling (eqn. (6.98)). Constante vermogensregeling wordt verkregen door de statische Kramer -speler die hieronder wordt beschreven.
Drive Kramer Static:
Het glijdende vermogen van de rotor wordt omgezet in CC door een diodebrug (Fig. 6.57 (a)). CC -vermogen wordt nu omgezet in een CC -motor dat mechanisch is gekoppeld aan de inductiemotor. Het paar dat op de kosten wordt geleverd, is een koppelomvang dat wordt geproduceerd door de inductie- en directe stroommotoren. De snelheidsregeling wordt verkregen door het veld van de continue stroommotor te regelen.

Figuur 6.57 (b) toont variaties in VD1 en VD2 met een snelheid voor twee DC -motorvermogenswaarden. De permanente bewerking wordt verkregen wanneer Vd1 = Vd2, dwz à a en b voor veldvelden IF1 en IF2.
Snelheidsregeling is mogelijk van synchrone snelheid ongeveer de helft van de synchrone snelheid. Wanneer een groter snelheidsbereik vereist is, wordt de diodebrug vervangen door een thyristorbrug.
Nu kan de relatie tussen VD1 en de snelheid worden gewijzigd door de rectificatierichter van de thyristor -gelijkrichter te regelen (zie Fig. 6.57 (c)). Snelheid kan nu worden gecontroleerd totdat het stopt.