Inductie -motorbedrijfsprincipe:
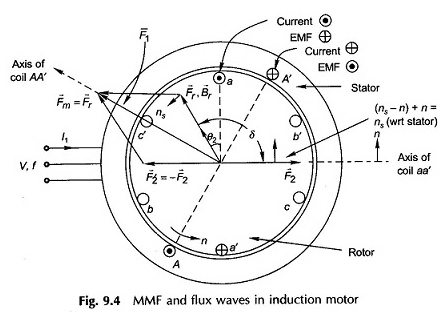
Het werkingsprincipe van de inductiemotor in figuur 9.4 toont het kruis -sectionele aanzicht van een inductiemotor. De stator wordt aangedreven uit een driefasige V / fase-spanningsvoeding en frequentie F Hz. De rotor wordt in 3 fasen gewikkeld voor evenveel palen dat de stator is en is kortgesloten. Er wordt aangenomen dat de weerstand van de stator en de reactantie van de lekken beide te verwaarlozen zijn voor
![]()
Of
- E1 = EMF geïnduceerd door de stator / fase
- KW1 = statorwikkelingsfactor
- NPH1 (serie) = Stator Tourne / Phase Series
- Φr = resulterende stroom / luchtpool
Het wordt gezien uit de vergelijking. (9.1) dat onafhankelijk van de bestaande belastingsomstandigheden op de rotor, φr, de stroom / pool die is vastgesteld in de luchtwandeling constant is, gekoppeld aan de spanning die wordt toegepast voor de gemaakte hypothese.
De MMF F̅R -vector met de B̅R -geassocieerde stroomdichtheidsvector die verantwoordelijk is voor de productie van φR -runs met een synchrone snelheid omdat deze wordt geassocieerd met 3 gebalanceerde 3 -fasen stromen getekend door de stator.
De relatieve snelheid tussen B̅R en de rotor veroorzaakt de inductie van een stroompatroon in de kortsluitige rotor.
Het koppel geproduceerd door de interactie van B̅R en de stromen van de rotor door de wet van Lenz zou de neiging hebben om de rotor in de rotatierichting van B̅R te verplaatsen om de relatieve snelheid te verminderen.
De motor is daarom zelfdicht en de rotor verwerft een constante snelheid n
Figuur 9.4 toont de relatieve locatie van de vectoren F̅r, B̅r (luchtkloof MMF en stroomdichtheid), F̅2 (rotor MMF) waarin f̅r f̅2 leidt door de hoek Δ = 90 ° + θ2 (automobile-actie), θ2 is de hoek onder de rotorrotor-emf.
De hoek θ2 is echter erg klein omdat de reactantie van de rotor veel kleiner is dan de weerstand tegen de rotor. De MMF -statorvector wordt vervolgens gegeven door
![]()
bevindt zich op het vectordiagram. Zolang het diagram wordt getekend, zijn de stator en de rotorfase A (weergegeven in de vorm van een enkele spoel) maximaal mogelijk. De lezer kan de locatie van de vectoren controleren vanaf de huidige fase die de juiste regel toepast.
Slijden en frequentie van rotorstromen:
In verwijzing naar figuur 9.4 wordt gemakkelijk opgemerkt dat B̅R met snelheid (ns – n) beweegt ten opzichte van rotordrivers (in de richting van B̅R). Dit staat bekend als schuifsnelheid. Verschuiving wordt gedefinieerd als

Uiteraard s = 1 voor n = 0, dat wil zeggen voor de stationaire rotor en s = 0 voor n = ns, dat wil zeggen dat de rotor met een synchrone snelheid werkt.
De frequentie van stromen geïnduceerd in de rotor is
De normale schreeuw met volledige belasting van het werkingsprincipe van de inductiemotor is ongeveer 2% tot 8%, zodat de frequentie van rotorstromen zo laag is als 1 tot 4 Hz.
De rotor door EMF -fase bij S = 1 (shift -rotor) wordt gegeven door
![]()
Bij elke verschuiving wordt de frequentie van de rotor SF SF, de EMF induceert door de rotor in SE2. Overweeg nu de impedantie van het rotorcircuit
![]()
Of
- X2 = rotorreactantie van de rotor wanneer gestopt (rotorfrequentie = statorfrequentie, f)
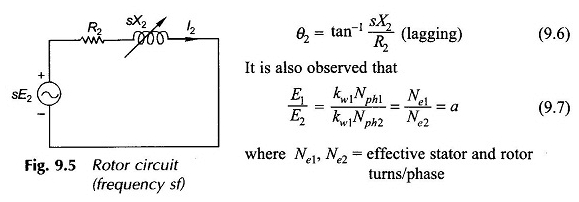
Wanneer de rotor werkt bij slip S, de frequentie is SF, wordt de impedantie omgezet in
![]()
Daarom blijkt dat de frequentie van rotorstromen, de geïnduceerde FEM en zijn reactantie allemaal in directe verhouding tot de verschuiving variëren. Figuur 9.5 toont het rotorcircuit met glijdende s. De circuitfasehoek is
Productie van MMF en rotormoppel:
In figuur 9.4 Aangezien de vector van de stroomdichtheid resulteert op B̅R op snelheid (ns – n) ten opzichte van de rotor, wordt een maximale positieve EMF geïnduceerd in de rotorspoel aa ‘(aangegeven door stip in bestuurder A en kruisen in de bestuurder A’) wanneer B̅r op 90 ° zich bevindt in de voorkant van de daling.
Omdat de stroom in de rotor achterblijft bij de EMF van θ2, zal de stroom in de spoel aa ‘maximaal positief zijn wanneer B̅R verder is gegaan door de hoek θ2. Het is op dit moment dat de MMF -vector van de rotor F̅2 zich langs de as van de aa ‘spoel bevindt.
Daarom wordt gezien dat B̅r (of f̅r) onder een hoek A = (90 + θ2) is vóór F̅2. Bovendien wordt F̅2 veroorzaakt door de stromen van de frequentie -rotor F2 = SF -runs vergeleken met de bestuurder van de rotor met snelheid (NS – N) en met snelheid NS.
Met betrekking tot de stator omdat de rotor zelf in dezelfde richting beweegt bij snelheid N vergeleken met de stator.
Aldus bewegen F̅R en F̅2 beide met een synchrone snelheid NS in vergelijking met de stator en zijn ze stationair ten opzichte van de andere met F̅R voor F̅2 door hoek (90 ° + θ2).
De interactie van het rotorveld en het resulterende veld creëert een paar in de rotatierichting van F̅r.
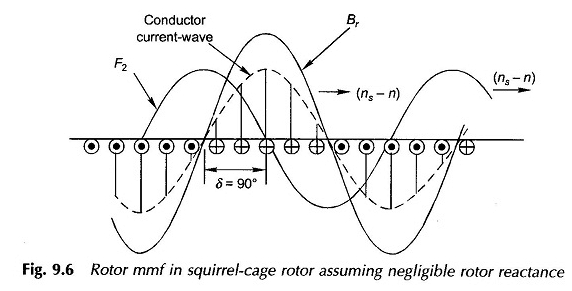
Overweeg nu het geval van de rotor van eekhoorn met bestuurders zich gelijkmatig verspreid over de periferie van de rotor. De reactie van de rotor MMF F2 is beter gevisualiseerd uit het ontwikkelde diagram van FIG.
9.6 waarin de rotor stationair is en de bruine golf – beweegt in vergelijking met de schuifsnelheid (NS – N). Dat de rotorreactantie wordt beschouwd als te verwaarlozen, zodat de stromingen van de bestuurder (kortgesloten) in overeenstemming zijn met de EMF S-stuurprogramma.
Het huidige patroon van de bestuurder is daarom sinusoïdaal weggenomen en bevindt zich in de ruimtelijke fase met kort en beweegt er synchroon mee. De rotor MMF -golf is een opgeslagen sinusvormig met hetzelfde aantal palen als de beweging van de ruwe golf ermee.
Zijn fundamentele (F2) weergegeven in figuur 9.6 wetten van de BR beweren met 90 °. Als de reactantie van de rotor nu wordt geënsceneerd, zou de stroomgolf van de bestuurder en daarom de rotor MMF -golf te laat zijn door hoek θ2.
Aldus zou de hoek tussen de BR en de F2 -golf zijn (90 ° + θ2), dezelfde als in de rotor van de wond.
Een squirrel -cage -rotor reageert daarom op dezelfde manier als een wondrotor, behalve dat het aantal fasen niet duidelijk is – het kan worden beschouwd als zoveel fasen als de staven / polen. Een eekhoorn-kooi-rotor kan altijd worden vervangen door een equivalente wondrotor met drie fasen.
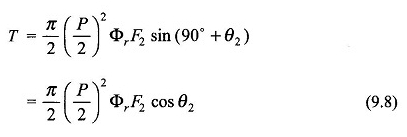
Het wordt gezien uit de vergelijking. (9.8) dan een lage reactierotor (zwak θ2 = tan-1 jsx2 / r2) zal een groter paar genereren voor φR, f2 en s gegeven.
Een kooi -eekhoornmotor is in dit opzicht hoger in vergelijking met een motor van de wondrotor omdat de kooirotor een lagere reactantie heeft omdat deze geen wikkeling heeft.
Een zeer belangrijke observatie die in principe kan worden gedaan om de inductiemotor hier te bedienen, is dat, hoewel de rotorstromen een SF -frequentie hebben, de MMF (F2) veroorzaakt door hen werkt met een synchrone snelheid in vergelijking met de stator.
Met andere woorden, de reactie van rotorstromen komt overeen met de frequentiebromen (f) van de stator die vloeien op een stationaire cilindrische structuur equivalent in de stator in plaats van de rotor.
Of, om op een andere manier te plaatsen, hebben de weergaven van de rotorstromen van de stator de frequentie F maar hebben dezelfde RMS -waarde.
De MMF -stator F̅1 -vector bevindt zich in figuur 9.4 van de vectorvergelijking
![]()
Bovendien kan F̅1 worden onderverdeeld in componenten als
![]()
waarbij F̅2 in tegenstelling is tot F̅2 en gelijk is aan de grootte en
![]()
De statorstroom die F̅1 veroorzaakt, kan overeenkomen met de EQ -vector. (9.10), worden verdeeld in componenten
![]()
Hier kan I̅m worden herkend als een magnetisatietroom van het bestand waardoor de MMF FR is en de resulterende stroom / pool, φR, terwijl de component van de statorstroom die de reactie F2 van de stroom van de rotor I2 in evenwicht houdt.
Figuur 9.4 toont ook de relatieve locatie van de stator AA ‘spoel en de positieve richting van de stroom. Deze instant vectorafbeelding geldt wanneer i2 een maximale positieve waarde heeft.
Voor F’2 om F2 te annuleren, moet de statorstroomcomponent die de MMF -rotor in evenwicht brengt in lijn zijn met de stroom van de rotor zoals weergegeven in de stator.

In termen van amplitudes is F’2 gericht tegenover F2, zodat ze annuleren terwijl I’2 en I2 de evenredigheid van de vergelijking moeten gehoorzamen. (9.13) en moet in fase zijn.
Bovendien kunnen we, volgens figuur 9.4, gemakkelijk zien dat in de stator de positieve richting van de EMF E1 tegen de positieve richting van I1 is, terwijl in de rotor de positieve richting van I2 in de positieve richting van SE2 is. Dit is vergelijkbaar met het geval van de transformator.
Met de richting van een positieve stroom in de stator aa ‘spoel gemarkeerd zoals in figuur 9.4 en de richting van de as van het colloquium aangegeven, is de inductiewet die een positieve emf zal geven in tegenstelling tot de stroom is

Dit werkingsprincipe van de inductiemotor heeft hetzelfde teken als dat wordt gebruikt in de transformatorbehuizing zodat de φR -stroomfase en de magnetisatietroom die het laat E1 van 90 ° creëert. In het circuitmodel zou IM daarom worden getekend door de XM -magnetiserende reactantie door E1.