Inductie -motor vectorbesturing:
Het enige idee achter de vectorregeling van de inductiemotor is om een elektrische lezer te hebben die hogere prestaties moet bieden die de CC -motor afzonderlijk op grote schaal in de industrie wordt gebruikt.
Bovendien moet een dergelijke lezer ook naar voren komen als een robuust, betrouwbaar alternatief, zonder onderhoud en goedkoper van de CC -speler. Een paar jaar geleden werd de DC -motor afzonderlijk opgewonden als een belangrijk werkpaard in de industrie beschouwd.
Dit komt door de snellere dynamische prestaties in vergelijking met de inductiemotor. De snellere dynamische respons van de CC -motor ligt in zijn dubbel gevoede motor met een installatie die inherent is aan een koppel en stroomregeling in de motor.
Vóór de introductie van de vectorregeling van de inductiemotor, worden de methoden die een brede acceptatie hebben genoten bij het regelen van het rijgedrag van de kooi -inductiemotor, spanningsregeling, frequentiecontrole, rotorweerstandsregeling, V / F -regeling, stroomregeling, schuifregeling, herstelregeling van het schuifvermogen, enz.
Al deze besturingsmethoden zijn gekwalificeerd als een scalaire besturing van een inductiemotor en daarmee heeft de kooi -engine lagere dynamische prestaties in vergelijking met de afzonderlijk geëxciteerde motor.
In hun inspanningen om een onderhoudsvrije, robuuste en hoogwaardige AC -lezer te hebben, wilde de onderzoeker prestaties en verbeterde CC -motorkenmerken afzonderlijk bereiken met een inductiemotor met een kooi -rotor.
In die zin introduceerde Blaschke het concept van vectorcontrole van de inductiemotor. Blaschke introduceerde in 1972 het oriëntatieprincipe op de grond om de kenmerken van de DC -motor in een inductiemotoraandrijving uit te voeren.
Voor hetzelfde gebruikte hij de ontkoppelde regeling van het koppel en de stroom in de motor en gaf zijn naam als controle over de transvector.
De kooi -inductiemotorlezer met controle of veldgeoriënteerde besturing biedt een hoog niveau van dynamische prestaties en gesloten lusbesturing geassocieerd met deze lezer biedt de stabiliteit op lange termijn van het systeem.
Hoewel er geen groot verschil is tussen scalaire en vectorcontroles, heeft deze laatste bepaalde eigenschappen die het gunstig maken als een besturingssysteem met hoge dynamische prestaties.
De vectorregeling wordt ook onafhankelijke of ontkoppelde controle genoemd waarbij het koppel- en stroomstroomvectoren worden gecontroleerd.
Het is een goed ingesteld feit dat in de vectorbesturingsmodus de kooi -motorlezer wordt gelineariseerd en dat deze zich gedraagt als een volledig gecompenseerde continue stroommotor, waarbij de regeling van de versterkingsstroom direct het elektromagnetische koppel beïnvloedt dat door de lezer is ontwikkeld.
Evenzo zijn in de kooi -engine de vectorbesturingsmethode de twee kwadratuurstromen die respectievelijk verantwoordelijk zijn voor de stroomproductie en het koppel, onafhankelijk geregeld en is de respons van de huidige component van de koppelproducent zeer snel, waardoor snellere koppelregeling wordt geboden en daarom heeft de lezer een hoog niveau van dynamische prestaties.
In brede zin staat de controle van de inductiemotor van de kooi omdat deze zich gedraagt als een volledig gecompenseerde continue stroommotor bekend als de vector.
In dit geval worden de statorstromen uitgedrukt in verwijzing naar een coördinaatkader dat in synchronisme loopt met de stator of rotor MMF -vector.
De statorstromen die op deze coördinaten worden uitgedrukt, worden opgelost in twee orthogonale componenten die de stroom en het koppel in de motor produceren. Deze zijn vergelijkbaar met de continue stroommotor waarin het koppel en de stroom worden geregeld door de frames van versterking en veld onafhankelijk te regelen.
Om het koppel en de stroom (dus snelheid) onafhankelijk in de inductiemotor te regelen, is het noodzakelijk om de amplitude en de fase van de drie statorstromen (IAS, IBS, ICS) door een snelle omvormer te regelen.
Daartoe wordt normaal gesproken een CC-TVSI (huidige spanningsbronomvormer) gebruikt. Een dergelijk besturingsalgoritme zou zeer betrokken zijn.
Het gebruik is gemaakt van transformatie van drie tot twee fasen (een goed bekende matrixbewerking). De twee fasestromen, de ID’s en de IQ’s in fase -kwadratuur vereisen controle over de twee amplitudes en een fase die is wat wordt uitgevoerd door controle van de vector.
Vectorregeling van de inductiemotormethode is de vorm van het blokdiagram wordt geïllustreerd in figuur 11.63 Sommige cruciale fasen zijn als volgt.
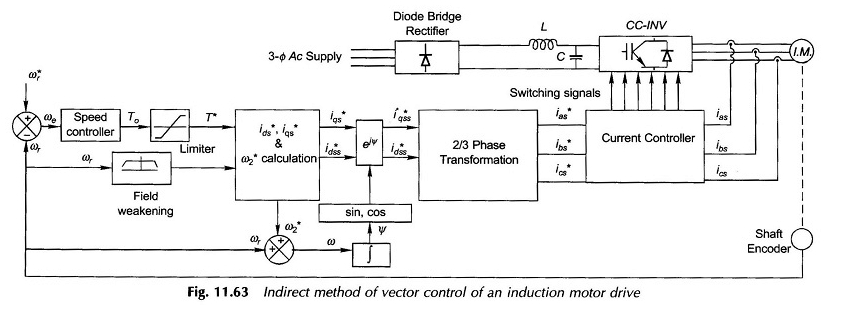
Uit het motorsnelheidsignaal (ωr) en de gewenste snelheid (ω * r) wordt de fout ωe bepaald. De snelheidscontroller berekent het motorkoppel (naar) dat nodig is om de snelheid te corrigeren die door een limiter gaat om het koppelsignaal t *te bepalen.
In een parallel veldblok, een verzwakkend blok, genereert het motortoerental ωr een ander signaal.
Deze twee signalen worden gebruikt om de i * ds en i * qs (ideale kwadratuurstromen) en een snelheidscorrectie ω * 2 te berekenen.
Ω = ωr + ω * r is geïntegreerd die vervolgens wordt gebruikt om de transformatie eJψ te vinden. Deze transformatie uitgevoerd op (i * ds, i * qs) geeft de laatste ideale set (i * dss, i * qss).
De fase 2/3 -transformatie op (i * dss, i * qss) geeft de ideale statorstroom (i * as, i * bs, i * cs).
De gemeten statorstromen (IAS, IBS, ICS) worden vergeleken met (i * as, i * bs, i * cs) door de huidige controller en de zes signalen gegenereerde de stromen die worden aangedreven door de inductiemotor.
Het bovenstaande is een vereenvoudigde uitleg van het vectorbesturingsalgoritme voor controle van de inductiemotor.
Bij controle van de inductiemotorvector wordt de rotorstroom gereguleerd door de statorwikkelstroom te regelen. Om de rotorstroom te reguleren, is ook kennis van zijn positie gewenst. De positie van de rotorstroom wordt gedetecteerd of geschat.
Bijgevolg, volgens de methoden die zijn aangenomen om de positie van de rotorstroomvector te beoordelen, wordt de vectorcontrole een directe vectorcontrole of indirecte vectorcontrole genoemd.