Equivalent inductiemotorcircuit:
Equivalent inductiemotorcircuit – Het gedrag van de inductiemachine is bestudeerd in termen van fenomeen voor veldbasis. De poging hier was opzettelijk gericht op de analogie van de inductiemotor -transformator. Bepaalde feiten die tot nu toe zijn vastgesteld, worden hieronder samengevat:
1 en 1

waar e2 = rotor van het EMF -oordeel.
Bovendien stroomt I’2 in de positieve terminal van E1 en I2 stroomt van de positieve terminal van E2. Bovendien, I2, zoals de stator laat zien, is de stroom van de frequentie van de stator F en is in lijn met de 2, de component van de stroom getekend door de stator om de rotor MMF F2 in evenwicht te brengen.
2. Zoals in een transformator, blijft de IM -magnetiserende stroomcomponent van de statorstroom achter bij de EMF geïnduceerd door de stator E1 van 90 °.
3. De inductiemotor is niet alleen een transformator die de spanning en de huidige niveaus verandert. Het gedraagt zich eigenlijk als een algemene transformator waarin de frequentie ook wordt omgezet in verhouding tot schuif zodat de EMF induceert door de rotor is SE2 en de reactantie van de rotor is SX2.
Het circuit equivalent aan de inductiemotor kan nu fase worden getekend zoals in figuur 9.7 (a) waarin de elementen van de serie (gegroepeerd) van de weerstand van de stator en de lekken reactantie werden opgenomen in het model.
De transformator die de stator- en rotorcircuits verbindt, is een ideale algemene transformator waarin de spanning van de rotor van de E2 -stop en de stroom van de rotor I2 zijn gekoppeld aan de hoeveelheden van de stator via de transformatieverhouding A, terwijl de frequentieparameter verschijnt in het circuit van de rotor door de slissement S, een mechanische parameter. Het mechanische uitgangsvermogen verschijnt op de boom aangegeven in de figuur.
Het rotorcircuit kan naar de statorzijde worden verwezen door een twee -stepproces dat het rotorcircuit wijzigt, zodat de draaiverhouding de eenheid wordt en vervolgens een frequentietransformatie uitvoert, die het gevolg is van een rotorcircuit equivalent aan de frequentie van de stator.
Door de rotorspanning te vermenigvuldigen met a en de stroom van de rotor met 1 / a, wordt de impedantie van de rotor gemodificeerd voor

In deze transformatie blijft macht invariant. Het rotorcircuit, na deze stap te hebben uitgevoerd, wordt getekend in figuur 9.7 (b). Dit reduceert de rotor tot een equivalente rotor met een turn -verhouding tussen eenheid met de stator.
Van het rotorcircuit equivalent aan figuur 9.7 (b)

Verdeel zowel de teller als de noemer door S

Deze eenvoudige tip verwijst naar het rotorcircuit op de statorfrequentie. Het gemodificeerde rotorcircuit is nu getekend in figuur 9.7 (c) waarin het rotor- en statorcircuit dezelfde frequentie heeft, de ideale transformator is nu een stationaire eenheidsratio -transformator.
Er wordt ook opgemerkt dat door het rotorcircuit naar de statorfrequentie te verwijzen, de reactantie constant wordt (x’2) en de weerstand variabel wordt (r’2 / s). De transformatie van de vergelijking. (9.15b) is geen invariante kracht (spanning verandert terwijl de stroom hetzelfde blijft).
De overgedragen kracht naar de middelbare school verklaart nu zowel het verlies van koper van de rotor als het mechanische vermogen (in elektrische vorm). Dit staat in contrast met figuur 9.7 (a) waarbij mechanisch vermogen via een boom wordt verwijderd.
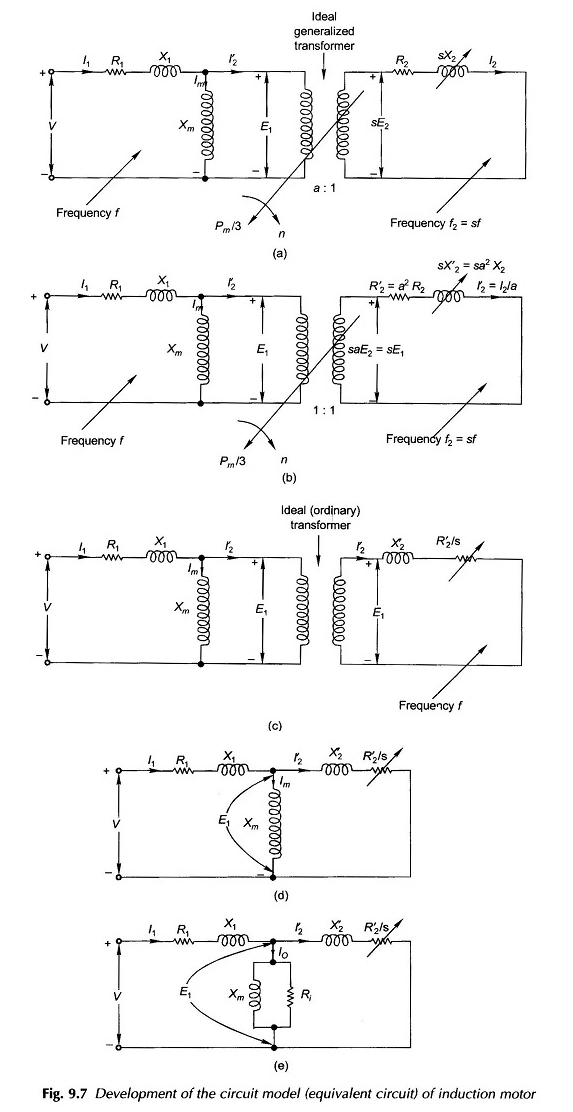
In de laatste fase van de ontwikkeling van equivalente inductiemotorcircuits, kan de ideale transformator van de eenheid ratio (gewoon) nu worden voorzien van het circuitmodel in figuur 9.7 (d).
De weergave van het verlies van ijzer in de stator kan heuristisch worden geïntroduceerd in het circuitmodel van figuur 9.7 (d) door een weerstand RI te plaatsen parallel met XM zoals in het circuitmodel van de transformator. Dit circuit equivalent aan de inductiemotor is ontworpen in figuur 9.7 (e).
Als r’2, wordt gescheiden van R’2 / s om het verlies van koper van de rotor als een afzonderlijke entiteit weer te geven, kan het circuitmodel worden getekend zoals in figuur 9.8 (a) waarin de variabele weerstand R’2 (1 / s – 1) de mechanische output in elektrische vorm vertegenwoordigt. Als alternatief is het circuitmodel van Fig.
9.8 (b) kan worden gebruikt (dit komt overeen met figuur 9.7 (d) waarin weerstand tegen het verlies van ijzer LA wordt weggelaten en dit verlies zou worden afgetrokken van de bruto mechanische uitgang (vermogen geabsorbeerd door R’2 (1 / s – 1)).
Dit komt overeen met bepaalde benaderingen die volledig acceptabel zijn in het normale schuifbereik in een inductiemotor. Bovendien kunnen de parameters van dit circuit (waarvoor de RI-waarde niet nodig is) eenvoudig worden verkregen door twee niet-geladen tests.
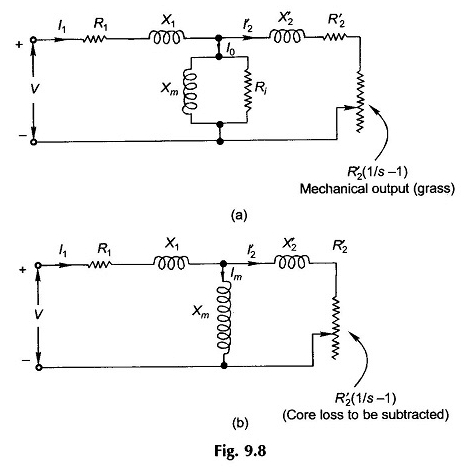
Het circuitmodel in figuur 9.8 (b) zou worden gebruikt voor het grootste deel van de volgende discussie. We kunnen hier opmerken dat het vermogen dat is verdwenen in R’2 (1 / S – 1) het basisverlies omvat, dat moet worden afgetrokken om het bruto mechanische vermogen te verkrijgen.
Om een duidelijk mechanisch vermogen te verkrijgen, moet het verlies van wind en wrijving meer worden afgetrokken. Basisverlies en verliesverlies en wrijvingsverlies worden gegroepeerd als een verlies van rotatie omdat deze twee verliezen optreden wanneer de motor loopt.
Het verlies van rotatie in een inductiemotor is aanzienlijk constant tot een constante uitgeoefende spanning en de snelheid van de motor varieert zeer weinig van volledige belasting bij volledige belasting.
Opmerking: netto mechanisch vermogen = boomvermogen