Inductiemotor
Inductie -engine principe | Koppel glijdend kenmerk:
Het inductiemotorprincipe is tot nu toe niet geïntroduceerd. Overweeg een cilindrische rotormachine met de stator en de rotorwond gedurende drie fasen en het identieke aantal polen zoals weergegeven in figuur 5.40.
Laten we in eerste instantie veronderstellen dat de rotor van de rotor zich in het open circuit bevindt en de stator worden aangesloten op een oneindige bus (v, f).
Statorstromen installeerden een roterend magnetisch veld in de luchtspleet dat werkt met een synchrone snelheid die een EMF induceert in de wikkeling van de stator die de spanning van de terminal in evenwicht brengt door aan te nemen dat de weerstand van de stator en de reactantie van de lekken te verwaarlozen zijn.
Het roterende veld induceert ook EMF in de rotorwikkeling, maar er circuleert geen rotorstroom omdat de rotor zich in het open circuit bevindt. De frequentie van rotor -EMF’s is natuurlijk f. Aangezien de rotor MMF F2 = 0 is, wordt er geen paar ontwikkeld en blijft de rotor stationair.
Het principe van de inductiemotor werkt eenvoudig als een transformator waarbij de stator (primair) en de rotor (secundaire) EMF’s van dezelfde frequentie hebben die daarin worden geïnduceerd door de roterende magnetische stroom in plaats van door een stroom die in de tijd varieert als in een gewone transformator.
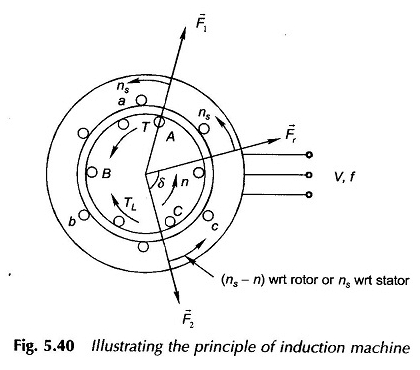 Dat de rotor nu stationair wordt gehandhaafd (geblokkeerd van de rotatie) en de kronkeling van de rotor is kortgesloten. De rotor draagt nu stroomstromen en maakt de MMF F2 in dezelfde richting en met dezelfde snelheid als het statorveld. F2 circuleert de reactiestromen in de stator van de busbalk (net als in een gewone transformator) zodat de stroom / pool φr van de resulterende stroom van stroomdichtheid (in de luchtwandeling met synchrone snelheid) een EMF -stator induceert om de spanning van de terminal in evenwicht te brengen. Het is duidelijk dat φr hetzelfde moet zijn als wanneer de rotor in open circuit was. In feite blijft φR constant onafhankelijk van de bedrijfsomstandigheden die worden gecreëerd door belasting op de motor. De interactie van φR en F2, die stationair van elkaar zijn, creëert het paar dat de neiging heeft om de rotor in de richting van FR of het veld van de stator F1 te verplaatsen. De inductiemotor is daarom een zelfstartapparaat dat anders is dan de synchrone motor.
Dat de rotor nu stationair wordt gehandhaafd (geblokkeerd van de rotatie) en de kronkeling van de rotor is kortgesloten. De rotor draagt nu stroomstromen en maakt de MMF F2 in dezelfde richting en met dezelfde snelheid als het statorveld. F2 circuleert de reactiestromen in de stator van de busbalk (net als in een gewone transformator) zodat de stroom / pool φr van de resulterende stroom van stroomdichtheid (in de luchtwandeling met synchrone snelheid) een EMF -stator induceert om de spanning van de terminal in evenwicht te brengen. Het is duidelijk dat φr hetzelfde moet zijn als wanneer de rotor in open circuit was. In feite blijft φR constant onafhankelijk van de bedrijfsomstandigheden die worden gecreëerd door belasting op de motor. De interactie van φR en F2, die stationair van elkaar zijn, creëert het paar dat de neiging heeft om de rotor in de richting van FR of het veld van de stator F1 te verplaatsen. De inductiemotor is daarom een zelfstartapparaat dat anders is dan de synchrone motor.
Laat de rotor kortsluiting nu mogen draaien. Het werkt naar het statorveld en verwerft een constante snelheid van n. Uiteraard n 
Snelheidssnelheid S -eenheid (vergeleken met synchrone snelheid) waarnaar de rotor achter het statorveld glijdt. De frequentie van rotor F2 = SF wordt schuiffrequentie genoemd. Van de vergelijking. (5.66), de snelheid van de rotor is
![]()
De trekkingsfrequentiestromen in de rotorwikkeling veroorzaken een rotorveld van rotor ten opzichte van de rotor in dezelfde richting als het veld van de stator met een snelheid van

Aangezien de rotor werkt met een snelheid N en het rotorveld in (ns – n) vergeleken met de rotor in dezelfde richting, is de netto snelheid van het rotorveld dat wordt gezien vanuit de stator (verwijzing naar de grond) is
![]()
Dat wil zeggen, hetzelfde als het veld van de stator. Aldus is het F2 -reactieveld van de rotor altijd stationair in vergelijking met het veld van de stator F1 of het resulterende FR -veld (met φR -stroom door pool). Aangezien de rotor MMF F2 evenredig is met de stroom van de rotor I2 en dat de stroom / pool resulterende φR wordt bevestigd door de terminalspanning onafhankelijk van de bedrijfsomstandigheden, wordt het koppel van de inductiemotor gegeven door (zie vergelijking (5.58))))))))))
![]()
We zien hier dat het koppel wordt geproduceerd door de inductiemotor met andere mechanische snelheid dan synchroon; Zo’n paar wordt het asynchrone paar genoemd.
De hoek 8 waardoor F2 laat is op FR, moet de resulterende MMF bekend zijn. Voordat u gaat om 8 te bepalen, moet worden opgemerkt dat de kortsluiting van de rotorwikkeling gelijk is aan het kortsluiting van alle stuurprogramma’s van een individueel wikkeling.
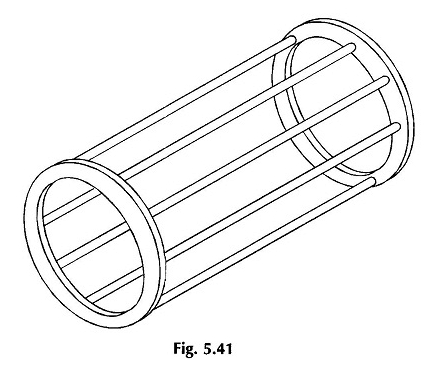
Bijgevolg moet de rotor niet noodzakelijkerwijs correct worden opgerold; Het kan worden gebouwd om bars uit te voeren die in rotor en kortsluiting worden geplaatst door eindringen aan elke kant van de rotor te maken.
Een dergelijke rotor wordt de rotor van eekhoorn-kooi genoemd; De geleidende kooi wordt afzonderlijk geïllustreerd in figuur 5.41. De rotor van eekhoorn-kooi heeft een goedkope en robuuste constructie en wordt overgenomen in een grote meerderheid van inductiemotoroepassingen.
Het inductiemotorprincipe met een correct gerolde rotor wordt de wondrotorinductiemotor genoemd en wordt geleverd met drie schuifringen die de installatie bieden om een externe weerstand tegen de rotorwikkeling toe te voegen voordat ze worden geëlimineerd. Deze motoren worden gebruikt in laadsituaties die de leiding hebben.
Normaal gesproken is de volledige belasting van een inductiemotor van de eekhoorn 3 tot 10%klein. Bijgevolg is de impedantie van de rotor voornamelijk resistief, de reactantie van de aanvallen van de rotor die evenredig zijn met F2 = SF is te verwaarlozen. Bovendien is de EMF induceert door de rotor is evenredig met het glijden van de rotor omdat φr is gefixeerd en draait met snelheid NS – n = SNS vergeleken met de rotor.
Als gevolg hiervan is de rotorstroom bijna in lijn met de rotor -EMF en evenredig met het glijden van de rotor. Deze conclusie zou uiteraard ook van toepassing zijn op individuele rotordrivers.
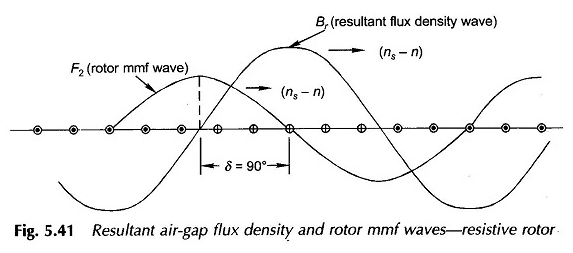
Figuur 5.42 toont de resident -resistente borstelstroomdichtheidsgolf voor rotordrivers op snelheid (NS – N) = SNS in een ontwikkeld diagram.
De stromingen geïnduceerd in kortgesloten rotorstuurprogramma’s zijn sinusoïdaal verdeling verdeeld met snelheid (NS-N) vergeleken met rotor in synchronisme met de Br. Meer, omdat rotordrivers moeten worden samengevat, wil dat zeggen
De stromingen daarin zijn in lijn met hun respectieve EMF’s, de verdeling van de rotorstroom bevindt zich in de ruimtefase met BR-wave. De verdeling van de sinusvormige rotorstroom produceert een rotor sinusvormige F2 -rotorgolf die 90 ° achter de verdeling van de rotorstroom of 90 ° achter de brutogolf ligt.
Daarom wordt geconcludeerd dat voor kleine schuifwaarden de hoek 8 in de inductiemotor 90 ° is. Dus,

Omdat de EMF -rotor lineair evenredig is met uitglijden, is de stroom van de rotor ook voornamelijk een rotorweerstand tegen kleine schuifwaarden. Bijgevolg is het koppel dat is ontwikkeld in de inductiemotor een steeds meer lineaire functie van de verschuiving voor een kleine schuifwaarde, nul voor s = 0, dat wil zeggen met een synchrone snelheid.
Naarmate de verschuiving verder toeneemt, kan de reactantie van rotorlekken niet langer over het hoofd worden gezien. De slip S-waarde is SX2, waarbij X2 de reactantie van rotorlekken is per fase bij de frequentie F, dat wil zeggen wanneer de rotor op een stand-still staat. Rotorstroom blijft nu achter bij de EMF -induceert

waarbij R2 weerstand is tegen rotor per fase.
Aangezien de stromen in rotordrivers de EMF geslepen door de hoek θ, beweegt de verdeling van de stroom van de stuurprogramma de rotor en daarom de rotor MMF F2 naar links in figuur 5.40 met een hoek θ, zodat dat
![]()
Dit betekent sin Δ <1. Omdat de rotorimpedantie toeneemt met S, is de stroom van de rotor bovendien verre van evenredig met de verschuiving. Deze twee factoren veroorzaken de passage van het motorkoppel door een maximale waarde en beginnen dan geleidelijk te dalen, aangezien S constant wordt verhoogd.
De aard van het volledige kenmerk van de koppelverschuiving in de inductiemotor wordt gepresenteerd in figuur 5.43. Het maximale koppel staat bekend als het breukkoppel. De motor zou rusten als deze na een korte periode zou worden geladen met een koppelbelasting die groter was dan de foutenwaarde.
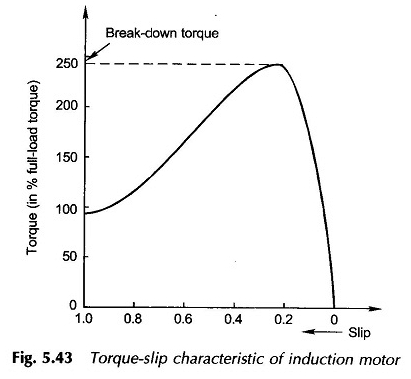
Zoals reeds vermeld, is het schuiven van een inductiemotor 3 tot 10% bij volledige belasting. Bijgevolg is het aanzienlijk een constante snelheidsaandrijving in tegenstelling tot de synchrone motor die werkt met een constante snelheid onafhankelijk van de belasting.
Het genereren van de resultaten van de actie als een inductiemotorprincipe wordt uitgevoerd bij een negatieve verschuiving of met een snelheid ns, dat wil zeggen met een snelheid boven de synchrone.