Regeling van inductiemotorsnelheid:
Controle zonder stap in de snelheid van inductiemotoren kan niet zo effectief en tegen lage kosten worden uitgevoerd als voor DC -motoren. Verschillende methoden voor het besturen van de inductiemotor kunnen worden bekeken door de snelheidsvergelijking te overwegen
![]()
We zien uit deze vergelijking dat er twee basismethoden voor het regelen van inductiemotorsnelheid zijn, namelijk
- Controleer de slip voor een vaste synchrone snelheid, en
- Synchrone snelheidsregeling.
Van

Er zijn twee manieren om de synchrone snelheid te regelen – regeling van de voedingsfrequentie en statorpalenregeling. Deze laatste methode geeft een stappenbesturing omdat de polen in verschillende van twee kunnen worden gewijzigd. De wijziging van de post wordt alleen uitgevoerd in een eekhoornkooi -engine en dat ook voor twee fasen.
Spanningsregeling:
Het is een schuifregelaarmethode met een variabele constante frequentiespanning die aan de motorstator is verstrekt. Het is duidelijk dat de spanning alleen onder de nominale waarde mag worden verminderd.
Voor een motor die werkt bij een volledige belastingverschuiving, als de verschuiving moet worden verdubbeld voor een constant laadkoppel, volgt deze uit vergelijkingen (9.34) en (9.35) dat de spanning moet worden verminderd met een factor 1 / √2 en dat de overeenkomstige stroom (I’2) stijgt tot √2 van de volledige belastingwaarde.
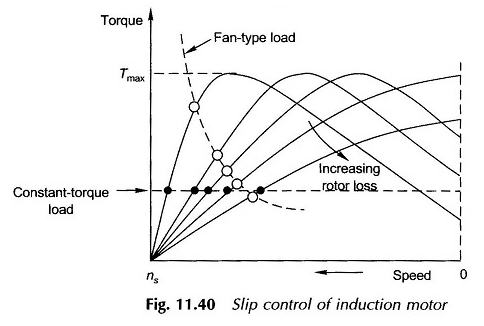
De motor heeft daarom de neiging om oververhit te worden. De methode is daarom niet geschikt voor snelheidsregeling. Het heeft een beperkt gebruik voor motoren die resulteren in fan -type belastingen waarvan de koppelbehoeften evenredig zijn met de snelheidssnelheid (zie Fig. 11.40).
Dit is een veelgebruikte methode voor plafondventilatoren die zijn getraind door inductiemotoren met één fase die een grote stopimpedantie hebben die de huidige door de stator beperken.
Rotorweerstandsregeling:
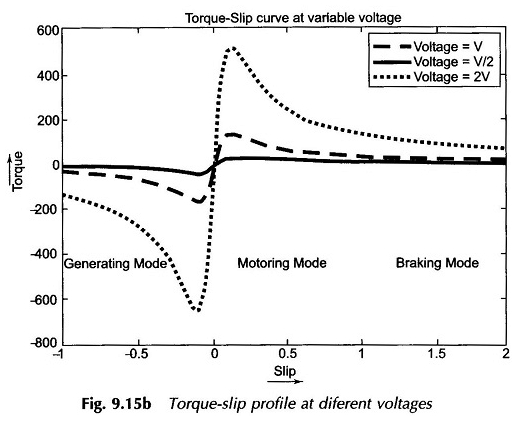
Zoals de naam al doet vermoeden, is dit type snelheidsregeling alleen mogelijk voor ringinductiemotoren. Het is gemakkelijk te zien door te verwijzen naar figuur 9.15 dat wanneer de rotorweerstand toeneemt, de motorverschuiving toeneemt (snelheidsdruppels) voor een vast laadkoppel.
De statorstroom varieert in beperkte mate omdat het effect van veranderingen van weerstand tegen glijden en rotor de neiging heeft om te annuleren (verwijzend naar vergelijking (9.34)) voor kleine schuifwaarden. Het invoervermogen neemt echter toe. Dit voorziet in het verloren vermogen in extra rotorweerstand.
De efficiëntie van de operationele motor neemt natuurlijk sterk af. Deze snelheidscontrolemethode als zodanig wordt daarom aangenomen voor een smal snelheidsbereik en in het algemeen voor een korte termijn werking.

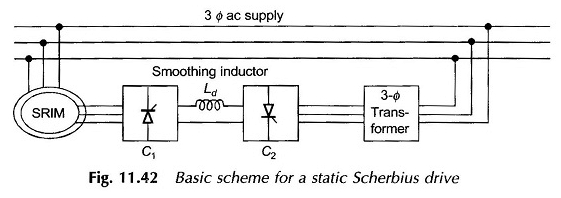
De effectiviteit van dit type snelheidsregelschema kan worden verbeterd door het vermogen van de rotor mechanisch terug te brengen naar de rotorboom of elektrisch naar de sector. Het eerste diagram kan worden geïmplementeerd door een gelijkrichter en een continue huidige motor in combinatie met de rotorboom.
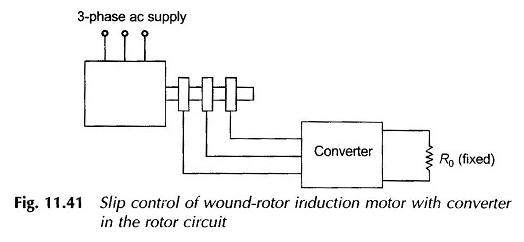
Het tweede diagram vereist een frequentieomvormer die variabele frequentievermogen omzet in een vaste frequentie (voeding) om het elektrische vermogen naar de sector te verminderen. Deze patronen kunnen worden ontworpen door de SCR -circuits (zie figuren 11.41 en 11.42).
Het is mogelijk om supersynchrone snelheden te bereiken door vermogen op de juiste frequentie in de rotor te injecteren door middel van een verstelbare frequentiebron.
We kunnen zien dat het precies het tegenovergestelde is om een weerstand toe te voegen tegen de rotor waarin het vermogen van de rotor wordt gehaald (en verspild in een externe weerstand).
Een breed scala aan snelheidsregeling hierboven en hieronder is synchroon wordt mogelijk gemaakt door frequentieconversieapparatuur in het rotorcircuit op te nemen.
Frequentiecontrole:
Het synchrone inductiemotorsnelheid kan in een stap worden geregeld zonder een breed bereik door de voedingsfrequentie te wijzigen. Volgens de vergelijking. (9.1) De luchtman die door paal stroomt, wordt gegeven door


Bijgevolg, om de verzadiging van stator- en rotorkernen te voorkomen die een hoge toename van de magnetisatietroom zou veroorzaken, moet de φR -stroom constant worden gehandhaafd omdat F gevarieerd is. Om dit te bereiken, volgt het uit de vergelijking.
(9.81) dat wanneer F gevarieerd is, v ook op een zodanige manier moet worden gevarieerd dat (v / f) constant blijft. De variabele voeding (V, F) van het constante vermogen (V, F) kan worden georganiseerd door de lay-out van de converter-lezing geïllustreerd schematisch in figuur 9.49 (a) die SCR-circuits gebruikt. Figuur 9.49 (b) toont een alternatief snelheidsregelingsschema met behulp van een converter en een DC -motor (shunt).

De belangrijkste aantrekkingskracht van het gebruik van de inductiemotor voor snelheidsregeling is de robuustheid, de lage kosten en het onderhoud ervan zonder onderhoud in vergelijking met de CC -motor.
Vanwege de kosten van de omvormer die betrokken is bij het regeling van de inductiemotorsnelheid, is het continue huidige motordiagram economischer.
Het inductiemotorschema is echter een solide kandidaat voor snelheidscontrole en zou in de nabije toekomst het moeten overnemen met een verbetering en vermindering van extra CCR -technologie.