Snelheidsregeling in gesloten lus van inductiemotortraining:
Een gesloten lussnelheidsregeling van inductiemotortraining wordt geïllustreerd in figuur 6.43. Het maakt gebruik van een binnenste snelheidslus met een glijdende limiter en een externe snelheidslus. Omdat voor een bepaalde stroom de schuifsnelheid een vaste waarde heeft, werkt de schuifsnelheidslus ook als een interne stroomlus.
Bovendien garandeert het ook dat de motorbewerking altijd optreedt in het deel van de snelheidssnelheidcurve tussen synchrone snelheid en maximale koppelsnelheid voor alle frequenties, waardoor een hoge koppel / stroomverhouding wordt gegarandeerd.
De lezer gebruikt een PWM -omvormer gevoed van een CC -bron, die regeneratieve remmen en operationele capaciteiten heeft met vier kwadranten. Het aandrijfschema is echter van toepassing op elke VSI- of Cycloconverter -speler met regeneratieve of dynamische remcapaciteit. De werking van de lezer wordt hieronder uitgelegd.
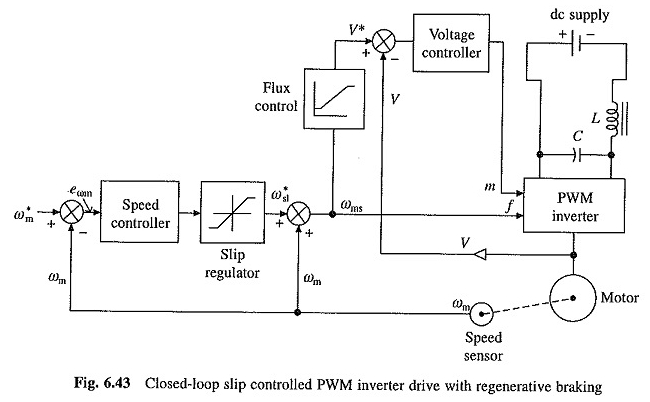
De snelheidsfout wordt verwerkt via een PI -controller en een schuifregelaar. De PI -controller wordt gebruikt om een goede precisie in de evenwichtstatus te verkrijgen en geluid te verlichten.
De schuifregelaar definieert de schuifsnelheidsregeling ω * SL, waarvan de maximale waarde beperkt is om de stroom van de omvormer te beperken tot een geautoriseerde waarde. De synchrone snelheid, verkregen door het toevoegen van de werkelijke snelheid ωm en de schuifsnelheid ω * SL, bepaalt de frequentie van de omvormer.
Het referentiesignaal voor gesloten lussnelheidsregeling van de inductiemotor van de spanning van de V * machine -terminal wordt gegenereerd uit frequentie F met behulp van een functiegenerator.
Het garandeert bijna een constante stroombewerking naar de basissnelheid en de werking bij een constante terminalspanning boven de basissnelheid.
Een toename van stappen van de snelheidsregeling ω * M produceert een positieve snelheidsfout. De schuifsnelheidsregeling ω * SL wordt gedefinieerd tegen de maximale waarde.
De lezer versnelt de maximale stroom van de geautoriseerde omvormer en produceert het beschikbare maximale koppel, totdat de snelheidsfout is teruggebracht tot een kleine waarde. De lezer vervormt uiteindelijk met een schuifsnelheid waarvoor het motorkoppel het laadkoppel in evenwicht brengt.
Een afname van de snelheidsregeling produceert een negatieve snelheidsfout. Het opdracht slipsnelheid is gedefinieerd tegen de maximale negatieve waarde.
De lezer wordt verbroken onder regeneratief remmen, maximaal geautoriseerde stroom en het maximaal beschikbare remkoppel, totdat de snelheidsfout is teruggebracht tot een kleine waarde.
Nu gaat de bewerking naar automobilisatie en wordt de lezer aangepast met de schuifsnelheid waarvoor het motorkoppel gelijk is aan het laadkoppel.
De lezer heeft een snelle reactie omdat de snelheidsfout is gecorrigeerd voor het beschikbare maximale koppel. Directe glijdende controle zorgt voor stabiele werking in alle bedrijfsomstandigheden.
Voor werking buiten de basissnelheid moet de glijdende snelheidslimiet van de schuifregelaar lineair worden verhoogd met de frequentie totdat de verdelingswaarde is bereikt.
Dit wordt uitgevoerd door toe te voegen aan de uitgang van de schuifregelaar een extra schuifsnelheidsignaal, evenredig met de frequentie en van een geschikt teken.
Voor frequenties boven de frequentie waarvoor het faalkoppel wordt bereikt, wordt de schuifsnelheidslimiet vastgehouden in de buurt van de afbraakwaarde.
Wanneer een snelle respons nodig is, kan de maximale glijden gelijk zijn aan zonde, omdat inductiemotoren kunnen worden gemachtigd om de nominale stroom meerdere keren te transporteren tijdens overgangsactiviteiten op korte termijn.
De omvormer en de frontconverter zijn gebouwd met behulp van halfgeleiderapparaten waarvan de overgangs- en permanente dieetafmetingen hetzelfde zijn. Vervolgens moeten de noten van de omvormer en de voorste converter verschillende keren de stroom van de motor worden gekozen.
Dit zal de variatiekosten aanzienlijk verhogen. Wanneer een snelle overgangsrespons niet vereist is, kunnen de omvormer- en frontconverterstromen worden gekozen om iets hoger te zijn dan die van de motor.